正运动学建模方法
【前言】
回顾前面,通过二连杆引入了机器人建模一些内容,其中包括机器人正运动的建模、机器人逆运动学建模、机器人动力学建模,以及涉及一点机器人控制的方法。大体了解了机器人领域需要的知识。详细的内容还需根据相关书籍进一步丰富。重回机器人正运动学,本篇的主要目的在于掌握机器正运动学的建模方法。
【正运动学】
以平面二自由度机械臂为例,正运动学的目的在于:在已知机械臂的关节变量θ1、θ2的情况下,求解机械臂末端的位姿。涉及目标的位姿,需要考虑的目标坐标系的建立(毕竟姿态和位置是相对坐标系而言);而坐标系的建立可以任意选择,每个人建立坐标系的方式不同,将不利于行业人员的交流。因此,为了解决这个问题,业内制定了一套约定----Denavit-Hartenberg约定。
1.1 Denavit-Hartenberg约定
简称DH约定,用于正运动的分析;其主要的约束条件有:
(DH1)坐标轴xi垂直于坐标轴zi-1;
(DH2)坐标轴xi与坐标轴zi-1相交;
通过这两条约定,存在唯一的a、d、θ、α使得相邻的坐标齐次变换矩阵可以表示为:
A=Rot(θ)Trans(d)Trans(a)Rot(α)
关于这四个变量以下图为例,有以下定义:
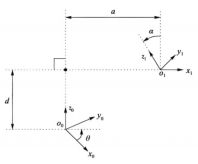
图1满足DH1与DH2约定的坐标系
a-----表示连杆长度,z0与z1之间沿公共法线x1测得得距离;
α----表示连杆扭曲,一个关节轴相对另一个关节轴绕公共法线旋转的角度;
d----表示连杆偏置,O1到x1与z0交点的距离;
θ-----表示关节角度,垂直于Z0平面内x0与x1的角度
1.2 建模实例
(1)DH约定建模
根据DH约定,对以下平面肘型机械臂进行正运动学建模。

第一步:编号
需注意坐标系、杆和关节变量的下标的编号:
a.坐标系从0开始编号,O0,O1,…On,其中O0为基坐标系;
b.关节变量从1开始编号,θ1,θ2,…θn+1;
c.杆从1开始编号,L1,L2,…Ln+1;
第二步:根据以上绘制DH表
第三步:写出齐次变换矩阵;
第四步:根据链式法则写出齐次变换矩阵(4*4);
第五步:根据变换矩阵写出杆件各连接点的坐标;
clc;clear;
close all;
global ulink;
%定义机械臂参数
ulink.l1=5;
ulink.l2=5;
ulink.sida1 = 45/180*pi;
ulink.sida2 = 90/180*pi;
%----------------------------------------------
% | a_i | alfa_i | d_i | sida_i
% 1 | l1 | 0 | 0 | sida1
% 2 | l2 | 0 | 0 | sida2
%--------------------------------------------
%DH约定:xi与zi-1相交且垂直
%DH齐次变换矩阵
% Ai =
% [ cos(sida_i), -cos(alfa_i)*sin(sida_i), sin(alfa_i)*sin(sida_i), a_i*cos(sida_i)]
% [ sin(sida_i), cos(alfa_i)*cos(sida_i), -sin(alfa_i)*cos(sida_i), a_i*sin(sida_i)]
% [ 0, sin(alfa_i), cos(alfa_i), d_i]
% [ 0, 0, 0, 1]
syms sida_i alfa_i a_i d_i
%计算齐次矩阵
sida_i = ulink.sida1;
alfa_i = 0;
d_i =0;
a_i = ulink.l1;
A0_1 = [cos(sida_i) -sin(sida_i)*cos(alfa_i) sin(sida_i)*sin(alfa_i) a_i*cos(sida_i);
sin(sida_i) cos(sida_i)*cos(alfa_i) -cos(sida_i)*sin(alfa_i) a_i*sin(sida_i) ;
0 sin(alfa_i) cos(alfa_i) d_i ;
0 0 0 1
];
sida_i = ulink.sida2;
alfa_i = 0;
d_i =0;
a_i = ulink.l2;
A1_2 = [cos(sida_i) -sin(sida_i)*cos(alfa_i) sin(sida_i)*sin(alfa_i) a_i*cos(sida_i);
sin(sida_i) cos(sida_i)*cos(alfa_i) -cos(sida_i)*sin(alfa_i) a_i*sin(sida_i) ;
0 sin(alfa_i) cos(alfa_i) d_i ;
0 0 0 1
];
A0_2 = A0_1*A1_2;
%绘图 plot([x1,x2],[y1,y2],'k')
figure(1)
plot([0,A0_1(1,4)],[0,A0_1(2,4)],'k','Linewidth',5)
axis equal
hold on
plot([A0_1(1,4),A0_2(1,4)],[A0_1(2,4),A0_2(2,4)],'r','Linewidth',5)
(2)向量法建模
第一步:编号,参考DH建模;
第二步:对基坐标的各坐标轴用单位向量表示(正交);
第三步:依次写出Oi坐标系各轴在Oi-1坐标系的表示;
第四步:根据链式法则写出旋转变换矩阵(3*3);
第五步:将各杆用向量表示;
clc;clear;
close all;
global ulink;
%定义机械臂参数
ulink.l1=5;
ulink.l2=5;
ulink.sida1 = 45/180*pi;
ulink.sida2 = 90/180*pi;
%向量法
%定义世界坐标系Oo
x0=[1,0,0]';
y0=[0,1,0]';
z0=[0,0,1]';
%定义局部坐标系O1(相对O0而言)
x1=x0*cos(ulink.sida1)+y0*sin(ulink.sida1);
y1=-x0*sin(ulink.sida1)+y0*cos(ulink.sida1);
z1=z0;
%定义局部坐标系O2(相对O1而言)
x2=x0*cos(ulink.sida1)+y0*sin(ulink.sida1);
y2=-x0*sin(ulink.sida1)+y0*cos(ulink.sida1);
z2=z0;
%写出齐次变换矩阵
R0_1 = [x1,y1,z1];
R1_2 = [x2,y2,z2];
R0_2 = A0_1*A1_2;
O0_1=ulink.l1*R0_1(:,1);
O0_2=O0_1+ulink.l2*R0_2(:,1)
%绘图
figure(1)
plot([0,A0_1(1,4)],[0,A0_1(2,4)],'k','Linewidth',5)
axis equal
hold on
plot([A0_1(1,4),A0_2(1,4)],[A0_1(2,4),A0_2(2,4)],'r','Linewidth',5)
前期内容代码已更新至公众号
