高效寻路算法——A*(A-Star)
在数据结构中我们学过图,而图中一个很重要的课题就是与最短路径、最优路径相关的寻路问题,包括Dijkstra、深度优先搜索,都是其中的经典算法;
同时,在游戏开发中,也常常需要设计合适的寻路算法来实现怪物AI的移动、人物自动寻路等常用功能,在各种算法中,A*无疑是最常用也是最经典的一种,作为进一步了解游戏寻路机制的基础,A*的学习很有必要,因此接下来这篇文章会从原理入手,一步步解析算法的过程并且实现它
 图0
图0
经典RPG中人物NPC的移动往往就需要合适的寻路算法,地图的网格化就是为了实现这点
一、算法介绍
A*算法是静态网络中求解最短路径时最有效的直接搜索算法,也是许多算法的启发式算法。因其简单高效的特点,常常会用作游戏中的寻路算法。当然要注意,在直接搜索算法中它是最有效的,后来也出现了许多预处理算法(如ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。
二、算法原理
A*算法的本质似乎是一种贪心选择策略,即走的每一步都是当前状况下的最优选择,而A*算法的贪心选择依据主要是三个值F、H和G和两个表openList和closeList;首先先来解释一下它们各自的含义:
G——从起点到达当前位置点的移动代价/距离,这个值是会不断累加并更新的;我们将横向或纵向(即上下左右)移动一格的代价定为10,那么斜向移动一格的代价可以定为14(即![]() ),使用10作为单位代价是为了避免小数计算。不同的路径会使得起点到达当前位置的移动代价并不相同,但是我们总是倾向于更小的G值,这是由贪心选择策略导致的,后面会看到这一点。
),使用10作为单位代价是为了避免小数计算。不同的路径会使得起点到达当前位置的移动代价并不相同,但是我们总是倾向于更小的G值,这是由贪心选择策略导致的,后面会看到这一点。
H——从当前位置到达终点的估计代价/距离,计算估计代价的方法有很多,我们这里仅讨论一种较为简单且常用的方法即曼哈顿(Manhattan)距离,曼哈顿距离表示两个点的绝对轴距总和,如图1所示。
 图1
图1
F——当前位置的总代价,也是进行贪心选择的最终依据,其值为移动代价与估计代价的值的和,即F = G + H。
openList——开放列表,用于保存当前可以到达的所有位置节点;我们每次都要从openList中寻找F值最小的节点作为当前节点,然后再将当前节点周围所有可到达的点加入到openList当中并将当前节点设置为它们的父节点,如果已经在openList当中,则需要判断从这个点到当前节点的代价是否更小,有必要则进行更新。这样,当把终点加入到openList中时,就可以回溯父节点找到一条最短路径;如果到openList为空时,终点仍未添加进去,则说明查找失败,无法到达终点。
closeList——关闭列表,用于保存开放列表中处理完的节点,保证处理过的节点不再处理,通常可以和图中不可到达的位置记录在同一个表中。
三、算法过程
1、将起点加入到openList中(每次将点加入到openList当中时,都要计算并保存它们的F值,后面不再赘述),将所有不可到达的点记录在closeList当中
2、重复进行下面步骤,直到openList为空或者将终点添加至openList中:
(1)从openList中取出F值最小的节点,将该点作为当前要处理的节点;
(2)遍历该当前点周围的可到达点(即八个方向且不在closeList中的点),如果这个可到达点不在openList中,直接将其加入进来,并将它的父节点设置为当前点;如果这个可到达点已经在openList当中,那么需要比较经由这个点到达当前处理点的路径代价是否会更小(因为H值不变,所以主要目标是比较G值大小),如果代价更小,那么就改变当前处理点的父节点为这个点,否则不作任何处理,这样是为了保证到达当前处理点的路径是最短的;
 图2
图2
例如图2所示,考察当前处理点周围的可加入点时,因为其上方的格子已经在openList当中,所以需要比较经由其上方格子到达当前格子的代价是否更小,很明显
Ga = 10 + 10 = 20;
Gb = 14;
Gb < Ga;
因此比较而言路线b的代价更小,当前待处理格子不需要作任何改变
(3)将该处理点记录到closeList当中
3、从终点开始,开始沿着父节点遍历至起点,就是利用A*算法所得到的最短路径
如图3456,以一个实例的形式展现了寻找从起点A到终点B的最短路径的过程
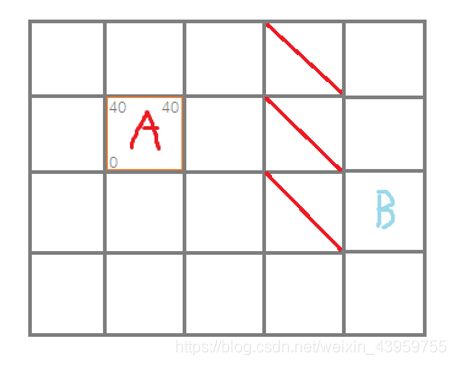 图3
图3
一开始openList当中只有A一个节点,因此取出F值最小的节点也就是A作为当前的待处理节点
 图4
图4
处理节点A,将其周围所有的可到达节点加入到openList中,因为这些可到达节点一开始都不在openList当中,因此不需要比较G值直接加入并将A设置为他们的父节点,然后取出openList中F值最小等于34的节点即右下角的节点作为下一个待处理节点;这样节点A处理完毕,将A加入到closeList当中
 图5
图5
处理当前F值等于34的节点,先考察其周围的节点,节点A因为已经处理完毕置于closeList当中,其右上角和右边的节点是不可到达节点,因此这些点无需考虑;其下方三个节点并不在openList当中,因此直接将他们加入openList,最后考察剩下两个点,比较可得经过他们的G值均大于原来的G值,因此它们并非是更优路径,不作任何改变;如此一来当前F值等于34的这个节点也处理完毕,我们将其加入到closeList当中
 图6
图6
反复重复上面的步骤,最终将B节点加入到openList当中,表示搜索成功,然后我们从终点B开始,访问它们的父节点,就可以得到一条从A到B的最短路径啦!即图中棕色箭头表示的路径
四、代码实现
#define MAX 10
#include
#include
#include
#include
#include"priorQue.h"
using namespace std;
typedef struct vector2 {
int x, y;
}vector2;
//定义一个二维向量结构体
typedef struct AStarNode {
vector2 pos, parent;
int F, G, H; //节点的位置和代价
AStarNode() {}
AStarNode(int x1, int y1, int x2, int y2) {
parent = { -1, -1 }; pos = { x1, y1 };
H = abs(x1 - y1) + abs(x2 - y2);
G = 0; F = H;
}
//构造函数,用于初始化位置坐标和计算估计代价
bool operator<(const AStarNode &n)const {
return this->F < n.F;
}
//重载运算符小于号,这样才能用最小堆进行存储
}AStarNode;
//A*节点
bool AStar(int visit[][MAX], int x1, int y1, int x2, int y2) //传入的参数分别是地图信息、起点的xy坐标、终点的xy坐标
{
/*
visit数组用于记录图中点的当前状态
如果等于0,代表这个点不可到达或者已经被置入closeList当中,因此visit数组实现了closeList表的功能
如果等于1,为正常状态,说明这个点能走通
如果等于2,说明见当前这个点位于openList当中
*/
AStarNode a[MAX][MAX];
//开一个与图等大的节点数组
vector2 around[8] = { {-1, 1}, {0, 1}, {1, 1}, {-1, 0}, {1, 0}, {-1, -1}, {0, -1}, {1, -1} }, tmp = { 0, 0 };
//around数组表示一个点周围的八个方向
AStarNode start(x1, y1, x2, y2), current;
a[x1][y1] = start;
//初始化起点和当前待处理的节点
bool flag = false;
//记录终点是否被加入到openList当中
stack record;
priorQue openList;
openList.enQueue(start);
//将openList用优先级队列来表示,这样队列首部第一个节点自然就是F值最小的节点
//先将起点加入到openList中去
while (!openList.empty() && !flag)
{
current = openList.deQueue(); //从openList中选出F值最小的作为当前待处理的节点
for (int i = 0; i < 8; i++)
{
tmp.x = current.pos.x + around[i].x;
tmp.y = current.pos.y + around[i].y;
if (tmp.x < 0 || tmp.x > MAX - 1 || tmp.y < 0 || tmp.y > MAX - 1 || visit[tmp.x][tmp.y] == 0) continue;
//得到当前待处理点周围的一个点,若这个点超出边界或者为不可到达点,则跳过不作处理
if (around[i].x != 0 && around[i].y != 0 &&
visit[current.pos.x + around[i].x][current.pos.y] == 0 && visit[current.pos.x][current.pos.y + around[i].y] == 0) continue;
//另外一种情况,即侧向虽然可达,但无法直接到达,也应跳过
if (visit[tmp.x][tmp.y] == 1) {
//如果visit等于1
AStarNode n(tmp.x, tmp.y, x2, y2);
n.parent = current.pos;
if (abs(around[i].x) + abs(around[i].y) > 1) n.G = current.G + 14;
else n.G = current.G + 10;
n.F = n.G + n.H;
//计算这个点的G值和F值
openList.enQueue(n);
a[tmp.x][tmp.y] = n;
visit[tmp.x][tmp.y] = 2;
//直接加入openList当中
if (tmp.x == x2 && tmp.y == y2) {
flag = true;
current = n;
}
//如果这个加入点为终点,将标记记为true
}
else {
//如果visit等于2
AStarNode n = a[tmp.x][tmp.y];
int price = 10;
if (abs(around[i].x) + abs(around[i].y) > 1) price = 14;
if (n.G + price < current.G) {
current.G = n.G + price;
current.parent = n.pos;
}
//需要判断从这个点到达待处理点是否为更优路径,如果是则进行改动
}
}
}
if (flag) {
while (current.pos.x != x1 || current.pos.y != y1) {
record.push(current);
current = a[current.parent.x][current.parent.y];
}
record.push(current);
while (!record.empty()) {
cout << "(" << record.top().pos.x << " ," << record.top().pos.y << ") " << record.top().F << endl;
record.pop();
}
}
//终点加入openList中,说明搜索成功,从终点开始访问父节点至起点并用栈来储存;之后再遍历一遍栈将路径打印出来
return flag;
}
//A*算法主体
int main()
{
int map[MAX][MAX] = {
1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 0, 1, 1, 0, 1,
1, 1, 0, 1, 1, 1, 0, 1, 1, 1,
1, 1, 1, 1, 0, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 0, 0, 0, 1, 1,
1, 0, 1, 1, 0, 0, 1, 1, 0, 1,
1, 1, 1, 1, 0, 1, 0, 1, 1, 1,
1, 0, 1, 0, 1, 1, 1, 0, 1, 1,
1, 0, 1, 1, 1, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 1, 1, 1, 1,
};
cout << AStar(map, 4, 4, 9, 9) << endl;
system("pause");
}
//编造数据进行测试
五、结果演示
将最短路径的节点坐标和F值依次打印出来(测试数据较少,有错误欢迎随时指正)。
结果如图7所示:
 图7
图7
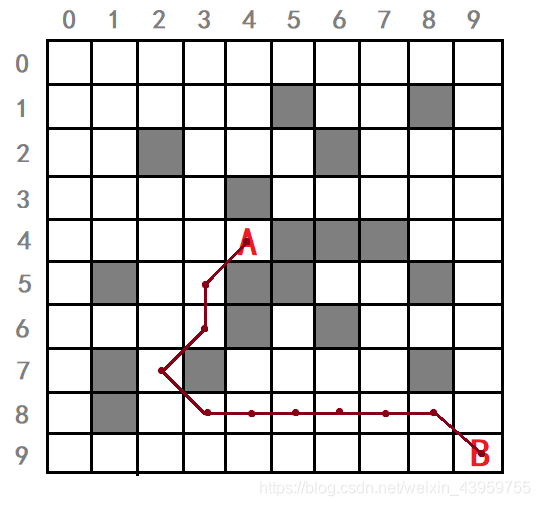 图8 根据程序运行结果画出的最优路径
图8 根据程序运行结果画出的最优路径
参考文章
https://blog.csdn.net/hitwhylz/article/details/23089415