算法竞赛进阶指南 0x43 线段树
文章目录
- 线段树简介
- 线段树的简单代码实现
-
- 建树代码
- 修改操作
- 查询操作
-
- 线段树的查询操作的时间复杂度分析:
- [AcWing245. 你能回答这些问题吗 ](https://www.acwing.com/problem/content/246/)
-
- 思路
- 代码[时间复杂度: O ( ( N + M ) l o g N ) O( \space(N+M)logN) O( (N+M)logN) ]
- 错误分析
- [AcWing246. 区间最大公约数](https://www.acwing.com/problem/content/247/)
-
- 思路
- 代码
- 总结
- 延迟标记
-
- 回顾并查集
- 概览
- [AcWing243. 一个简单的整数问题2](https://www.acwing.com/problem/content/244/)
-
- 总结与反思
- 代码
- 扫描线
-
- [AcWing247. 亚特兰蒂斯](https://www.acwing.com/problem/content/249/)
-
- 思路
- DeBug
- 代码
- 思路解析
- [AcWing248. 窗内的星星](https://www.acwing.com/problem/content/250/)
-
- 思路
- 代码
- 动态开点与线段树的合并
-
- 动态开点
-
- 初始化代码
- 示例操作代码
- 线段树的合并
-
- 初始条件:
- 合并代码
- 时间复杂度分析
线段树简介
英文名称:Segment Tree
相比于树状数组,是一种更加通用的结构。
- 每一个节点代表一个区间。
- 只有唯一的根节点,根节点对应的是所有统计区间( 1 − N 1-N 1−N)上的值。
- 线段树的每一个叶子节点都代表着x-x的值。
- 对于一个线段树的内部节点,当TA对应的是 L − R L-R L−R,那么
- 左孩子对应 L − ⌊ L + R 2 ⌋ L-\lfloor {{L+R}\over {2}} \rfloor L−⌊2L+R⌋
- 右孩子对应 ⌊ L + R 2 ⌋ − R \lfloor {{L+R}\over {2}} \rfloor-R ⌊2L+R⌋−R
线段树的规律研究:
-
除去最后一层,发现线段树是一个完全二叉树。
所以可以像二叉堆那样,使用一个数组来存储整棵二叉树- 对于二叉树的父亲节点:x/2
- 对于二叉树的左孩子:x*2
- 对于二叉树的右孩子:x*2+1
-
线段树的高度是 l o g N logN logN
-
对于具有N个节点的满二叉树,需要有 2 N − 1 2N-1 2N−1个节点。但是对线段树,最后一层也许会有枝叶,所以应该创建 4 N 4N 4N的数组。
线段树的简单代码实现
下面使用维护一个区间最大值的这一个任务来熟悉线段树的基本使用
父亲节点对应区间的最大值等于两个儿子节点的最大值的最大值
线段树的建立方法:
- 从上往下建树
- 从下往上传递信息
建树代码
#include 修改操作
void change(int p, int x, int v)
//p表示当前的位置指针,x表示在s数组中需要修改的下标。v表示修改之后的值
{
if(t[p].l == t[p].r) {
t[p].data = v;
return;
}
int mid = (t[p].l+t[p].r) / 2;
if(x <= mid) change(2*p, x, v);
else change(2*p+1, x, v);
t[p].data = max(t[p*2].data, t[p*2+1].data);
}
查询操作
有两种情况:
- 所要查询的区间完全覆盖了当前节点的区间,此时,应该直接返回这一个区间的值(作为要查询区间的最大值的候选)
- 否则进行递归查找。
int ask(int p, int l, int r)
{
if(l <= t[p].l && r >= t[p].r)
{
return t[p].data;
}
int mid = (t[p].l + t[p].r)/2;
int ans = INT_MIN;
if(l <= mid) ans = max(ask(p*2, l, r), ans);
if(r > mid) ans = max(ask(p*2+1, l, r), ans);
return ans;
}
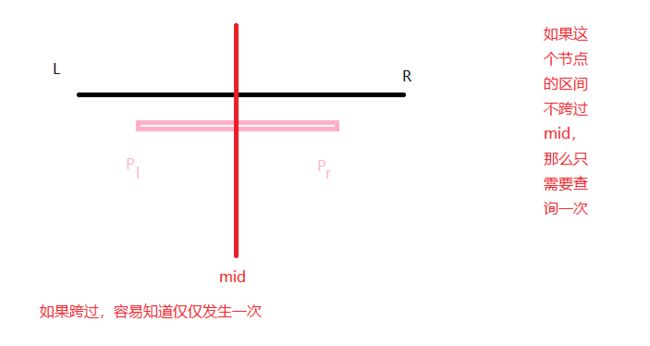
线段树的查询操作的时间复杂度分析:
有以下几种情况:(不妨认为l,r表示要查询的区间)
( p l p_l pl表示节点的左端点, p r p_r pr表示节点的右端点)
不妨设 m i d = ⌊ p l + p r 2 ⌋ mid=\lfloor\frac{p_l+p_r}{2} \rfloor mid=⌊2pl+pr⌋
-
当 l ≤ p l 并 且 p r ≤ r l\leq p_l 并且 p_r\leq r l≤pl并且pr≤r,此时,不产生递归。直接返回
-
l > p l 并 且 l ≤ p r ≤ r l> p_l 并且 l\leq p_r\leq r l>pl并且l≤pr≤r
- 情形一:当 l ≤ m i d l \leq mid l≤mid,那么就会递归两个区间,但是右半区间只进行递归一次。
- 情形而:当 l > m i d l>mid l>mid此时,递归一个子区间.
-
r < p r 并 且 l ≤ p l ≤ r r
r<pr并且l≤pl≤r ,与2相同 -
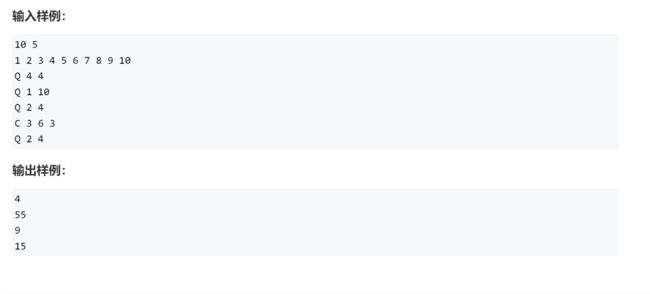
AcWing245. 你能回答这些问题吗

思路
线段树可以更加方便地维护各种区间的信息。
但是要注意:这些信息必须具备空间可加性!!
我的思路是把每一个区间的最大区间维护出来,在把该最大区间的左右端点维护出来,但是这样在进行传递的时候仅仅可以知道是否能把区间合并到一起,但是最大值又会发生变化,为此进行分析:
区间最大值的可能情况有以下三种情况
- 最大值位于左子树中
- 最大值位于右son中
- 最大值跨越位于左树与右树的
所以在维护最大值的同时,应该加上从区间的左边往右数的区间最大值lmax以及右边往左数的区间最大值rmax
对于区间最大值,那么就是两个字树区间单独区间最大值与左子树的rmax以及右子树的lmax之中的最大值
即max(t[p*2].maxx, t[p*2+1].maxx, t[p*2].rmax+t[p*2+1].lmax)
但是对于lmax以及rmax有两种情况:
lmax仍然是左子树的lmaxlmax是左子树的全部区间加上右子树的lmax
对于这种情况,还要知道左子树的区间总和sum
综上,共维护4+2个信息
lmax,rmax,maxx,sum,l,r
代码[时间复杂度: O ( ( N + M ) l o g N ) O( \space(N+M)logN) O( (N+M)logN) ]
#include错误分析
int ask(int p, int l, int r)
{
if(l <= t[p].l && t[p].r <= r)
{
return t[p].maxx;
}
int mid = (t[p].r + t[p].l)/2;
int ans = INT_MIN;
if(l <= mid) ans = max(ask(p*2, l, r), ans);
if(r > mid) ans = max(ask(p*2+1, l, r), ans);
return ans;
}
经过分析,发现是在ask这里发生了错误。
区间最大值的结果并不是一味地累加,而是要做许多决策。
注意:我在新改进的代码中,在ask中建立的ans,a,b,的l和r变量其实都没有用!!
有用的只有lmax和rmax和maxx
AcWing246. 区间最大公约数
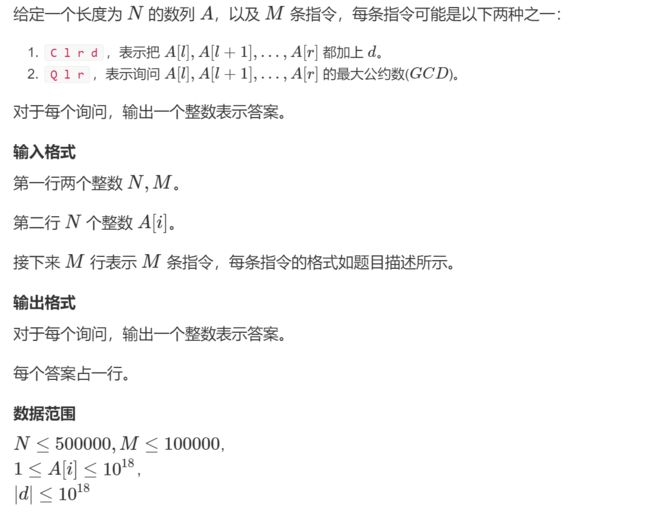

思路
注意:线段树同样也是单点修改,区间查询
如果同时修改一个区间的值,求出一个差分序列或许会比较好。
注意:补充欧几里得定律
g c d ( a , b , c ) = g c d ( a , b − a , c − b ) gcd(a, b, c) = gcd(a, b-a, c-b) gcd(a,b,c)=gcd(a,b−a,c−b) [对于任意多个整数均成立]
这启示我们可以采用求差分来求gcd
- 好处:支持把区间操作化为单点操作
- 可以使用线段树来对gcd进行维护
设a[]存储原始数据,b[]存储a的差分
这个时候,gcd = gcd(a[l], b[l~r])这样,还需要一个区间修改,单点查询的树状数组来查询a[l]
代码
#include 总结
关于gcd的求法:
- 0与一个数字gcd还是这个数字。
- 对于负数,也可以使用gcd,效果与正数是一致的。
延迟标记
回顾并查集
当把两个集合合并的时候,只是把一个集合的根节点连接到了父亲节点,并没有花费大量的时间来处理被连接的这颗子树。
在查询的时候使用路径压缩进行处理。
概览
延迟标记主要适用于对于区间的修改。就像查询一样,当样修改的区间完全覆盖当前节点的区间的时候,然后就直接回溯,不再继续向下,把这一个节点做一个标记。当某一次查询的时候,如果需要查询这个节点的子节点,那么就
- 使用这个节点更新下面的值
- 给两个儿子打上标记
- 消除这个节点的标记
注意延迟标记的定义:当前节点已经被修改,但是子节点还没有被修改
AcWing243. 一个简单的整数问题2
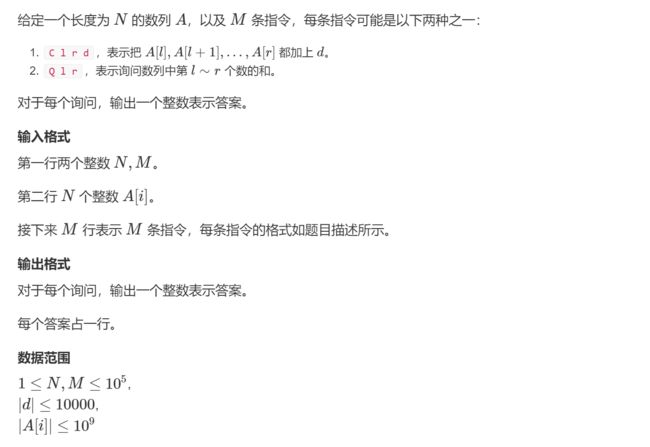
总结与反思
在这道题目中,我仅仅是给当前节点增加了一个数字,并没有考虑到子区间的每一个数字全部增加,所以这个点在修改之后的值应该是区间长度乘以增加的值。
if(l <= t[p].l && t[p].r <= r)
{
t[p].add += d;
t[p].sum += d;
return;
}
代码
#include 扫描线
AcWing247. 亚特兰蒂斯
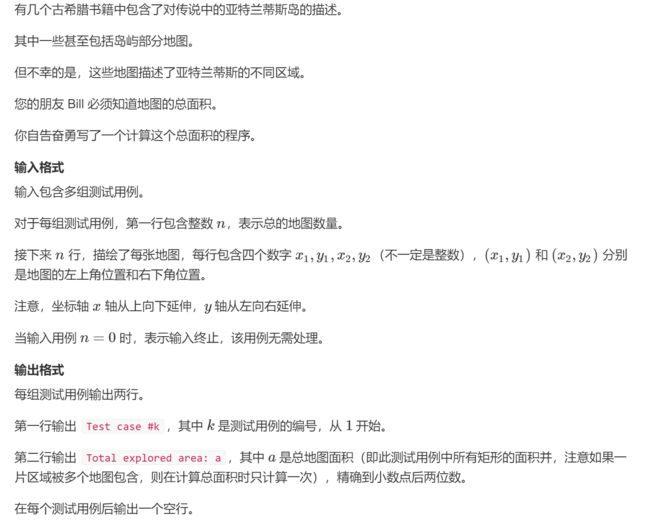
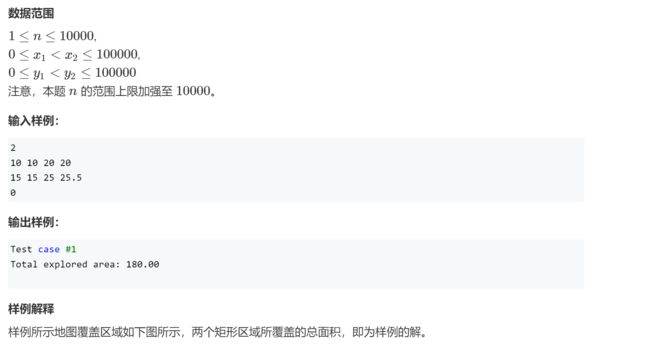

思路
这道题目我只会暴力。。
DeBug
我在处理线段树的过程中遇到了一些问题。
我认为线段树应该按照实际的端点进行存储。但是实际上,线段树必须存储区间(因为我的cnt操作是针对区间进行的)
是
代码
#include 思路解析
如代码部分所示。
要注意,在这一道题目中,线段树是区间修改,按照道理,应该使用延迟标记来进行加快速度。
但是由于:
- 这道题目的增加以及删除是成对出现的
- 每一次查询全部是查询的最大的哪一个区间。
所以可以不适用延迟标记采用getval()函数内部的方法。
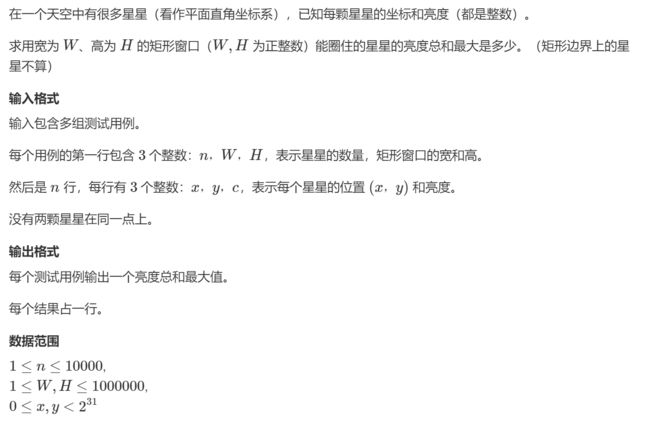
AcWing248. 窗内的星星
输入样例:
3 5 4
1 2 3
2 3 2
6 3 1
3 5 4
1 2 3
2 3 2
5 3 1
输出样例:
5
6
思路
这道题目就很像前缀和的板子题。
就是坐标的范围有一点大,但是可以进行离散化,然后就能统计前缀和,得到答案。
当然,这里使用线段树。
使用线段树需要迈过两个关卡
-
关卡一:框柱星星的边框边界的处理

-
关卡二:我框星星 or 星星自己来一个框
我框住的星星的亮度的最大值就等价于把每一个星星作为左下角,然后生成宽W-1,高H-1的亮度为c边框,所有边框放在一起,(亮度可以叠加),找到一点最亮的点。
证明:- 对于我框柱的星星的亮度 = 边框的右上角就是星星生成的边框中亮度叠加。
- 边框中任一点的叠加 = 以这一点为框框的右上角框柱的星星亮度的和。
两个集合等价,所以最大值也相等。
得证!
根据上一道题的做法,写代码不成问题!
注意:上一个题目是没有用到延迟标记(用了延迟标记的一半),但是这一道题目不能与上一道题目一样。
这里必须完整的延迟标记。

代码
#include 动态开点与线段树的合并
动态开点
线段树用来维护一段的权值范围:称为权值线段树。
动态开点的意义:
降低空间复杂度
- 优点
- 可以降低空间复杂度。
之前需要开4*N
现在的空间复杂度是 O ( M l o g N ) O(MlogN) O(MlogN),M 是操作次数,最大不超过N-1(如果所有叶子节点全部连进来)
- 可以降低空间复杂度。
- 缺点
- 抛弃了之前的完全二叉树的2倍存储结构,左右孩子的索引需要借助指针进行实现。
- 区别
- 原来的l和r已经变成现在的左孩子以及右孩子指针,
l和r依靠区间进行传递。
- 原来的l和r已经变成现在的左孩子以及右孩子指针,
初始化代码
#include 示例操作代码
void add(int p, int l, int r, int val, int delta)//作用:把val位置增加delta
{
if(l==r)
{
t[p].ans += delta;
return ;
}
int mid = (l+r)>>1;
if(val <= mid)
{
if(!t[p].lc) t[p].lc = build();
add(t[p].lc, l, mid, val, delta);
}
else
{
if(!t[p].rc) t[p].rc = build();
add(t[p].rc, mid+1, r, val, delta);
}
t[p].ans = max(t[t[p].lc].ans, t[t[p].rc].ans);
//注意:当某一个孩子不存在的时候,访问的是t[0],注意把t[0].ans 设置合适的值
}
线段树的合并
初始条件:
两个线段树要维护相同的总区间
合并代码
注意:仅仅适用于
- 动态开点
- 两个线段树维护的区间值相同
以下代码表示得到把两个线段树维护的数列相加之后的线段树。
如果直接暴力操作比较麻烦,直接线段树合并比较容易
int Merge(int p, int q, int l,int r)
{
if(!q) return p;
if(!p) return q;
if(l == r)
{
t[p].ans += t[q].ans;
return p;
}
int mid = (l+r)>>1;
t[p].lc = Merge(t[p].lc, t[q].lc, l, mid);
t[p].rc = Merge(t[p].rc, t[q].rc, mid+1, r);
t[p].ans = max(t[t[p].lc].ans, t[t[p].rc].ans);//不要忘记更新值
return p;//不要忘记返回
}
时间复杂度分析
由于在合并的过程中,每一次调用Merge函数都会删除一个节点。所以时间复杂度为 M l o g N MlogN MlogN,其中M是插入的次数,N是区间的长度。时间复杂度最多不超过2*N。
完!