计算机图形学13:三维图形的几何变换

作者:非妃是公主
专栏:《计算机图形学》
博客地址:https://blog.csdn.net/myf_666
个性签:顺境不惰,逆境不馁,以心制境,万事可成。——曾国藩
文章目录
- 专栏推荐
- 专栏系列文章
- 序
- 一、三维图形的几何变换
- 二、数据结构及工具函数定义
- 三、平移变换
- 1. 平移变换矩阵
- 2. 代码实现
- 3. 效果展示
- 四、比例变换
- 1. 比例变换矩阵
- 2. 代码实现
- 3. 效果展示
- 五、旋转变换
- 1. 旋转变换矩阵
- 2. 代码实现
- 3. 效果展示
- 六、对称变换
- 1. 关于坐标平面对称变换矩阵
- 2. 关于坐标轴对称变换矩阵
- 3. 代码实现
- 4. 效果展示
- 七、错切变换
- 1. 变换矩阵
- 2. 代码实现
- 3. 效果展示
- 八、相对任意参考点的复合变换
- 九、相对任意方向的复合变换
- the end……

专栏推荐
| 专栏名称 | 专栏地址 |
|---|---|
| 软件工程 | 专栏——软件工程 |
| 计算机图形学 | 专栏——计算机图形学 |
| 操作系统 | 专栏——操作系统 |
| 软件测试 | 专栏——软件测试 |
| 机器学习 | 专栏——机器学习 |
| 数据库 | 专栏——数据库 |
| 算法 | 专栏——算法 |
专栏系列文章
| 文章名称 | 文章地址 |
|---|---|
| 直线生成算法(DDA算法) | 计算机图形学01——DDA算法 |
| 中点BH算法绘制直线 | 计算机图形学02——中点BH算法 |
| 改进的中点BH算法 | 计算机图形学03——改进的中点BH算法 |
| 中点Bresenham画椭圆 | 计算机图形学04——中点BH绘制椭圆 |
| 中点BH算法绘制任意斜率直线 | 计算机图形学05——中点BH算法绘制任意斜率的直线 |
| 中点Bresenham画圆 | 计算机图形学06——中点BH算法画圆 |
| 有效边表法的多边形扫描转换 | 计算机图形学07——有效边表法绘制填充多边形 |
| 中点BH算法绘制抛物线 100 x = y 2 100x = y^2 100x=y2 | 计算机图形学08——中点BH绘制抛物线 |
| 二维观察之点的裁剪 | 计算机图形学09——二维观察之点裁剪 |
| 二维观察之线的裁剪 | 计算机图形学10——二维观察之线裁剪 |
| 二维观察之多边形的裁剪 | 计算机图形学11——二维观察之多边形裁剪 |
| 二维图形的几何变换 | 计算机图形学12——二维图形几何变换 |
| 三维图形的几何变换 | 计算机图形学13——三维图形几何变换 |
| 三维图形的投影变换 | 计算机图形学14——三维图形投影变换 |
序
计算机图形学(英语:computer graphics,缩写为CG)是研究计算机在硬件和软件的帮助下创建计算机图形的科学学科,是计算机科学的一个分支领域,主要关注数字合成与操作视觉的图形内容。虽然这个词通常被认为是指三维图形,事实上同时包括了二维图形以及影像处理。
一、三维图形的几何变换
对三维图形的几何信息经过平移、比例、旋转等变换后生成新的三维图形,复杂图形的几何变换可通过变换矩阵对图形的基本元素点、线、面作用,其中对点的矩阵是基础。
其中的变换形式如下:
[ x ′ y ′ z ′ 1 ] = T 2 D ⋅ [ x y z 1 ] = [ a b c p d e f q h i j r l m n s ] ⋅ [ x y z 1 ] \begin{bmatrix} x'\\y'\\z'\\1\\ \end{bmatrix}=T_{2D}\cdot\begin{bmatrix} x\\ y\\ z\\ 1\\ \end{bmatrix}=\begin{bmatrix} a&b&c&p\\ d&e&f&q\\ h&i&j&r\\ l&m&n&s\\ \end{bmatrix}\cdot\begin{bmatrix} x\\ y\\ z\\ 1\\ \end{bmatrix} x′y′z′1 =T2D⋅ xyz1 = adhlbeimcfjnpqrs ⋅ xyz1
二、数据结构及工具函数定义
struct VERTEX3D { double x, y, z; }; // 三维空间点结构
#define PI acos(-1)
/// 齐次坐标
Matrix vertex3D2qici(VERTEX3D vertex3D) {
Matrix qiciVertex(4, 1);
qiciVertex.matrix[0][0] = vertex3D.x;
qiciVertex.matrix[1][0] = vertex3D.y;
qiciVertex.matrix[2][0] = vertex3D.z;
qiciVertex.matrix[3][0] = 1;
return qiciVertex;
}
三、平移变换
1. 平移变换矩阵
T t = [ 1 0 0 t x 0 1 0 t y 0 0 1 t z 0 0 0 1 ] T_{t}=\begin{bmatrix} 1&0&0&t_x\\ 0&1&0&t_y\\ 0&0&1&t_z\\ 0&0&0&1\\ \end{bmatrix}\ Tt= 100001000010txtytz1
2. 代码实现
/// 平移后的三维点坐标
VERTEX3D transTransform3D(VERTEX3D vertex3D, int x, int y, int z) {
Matrix qiciVertex= vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 设置各方向平移距离
transform.matrix[0][3] = x;
transform.matrix[1][3] = y;
transform.matrix[2][3] = z;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
3. 效果展示
测试代码如下:
void testTransTransform() {
VERTEX3D vertex3D = { 0,1,0 };
VERTEX3D res = transTransform3D(vertex3D, 1, -1, 1);
cout << res.x << " " << res.y << " " << res.z << endl;
}
点(0,1,0)在x,y,z三个方向上分别平移(1,-1,1)个单位后,坐标为(1,0,1),如下图所示:

四、比例变换
1. 比例变换矩阵
T t = [ a 0 0 0 0 e 0 0 0 0 j 0 0 0 0 1 ] T_{t}=\begin{bmatrix} a&0&0&0\\ 0&e&0&0\\ 0&0&j&0\\ 0&0&0&1\\ \end{bmatrix}\ Tt= a0000e0000j00001
2. 代码实现
/// 比例变换后的三维点坐标
VERTEX3D scaleTransform3D(VERTEX3D vertex3D, double scaleX, int scaleY, int scaleZ) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = scaleX;
transform.matrix[1][1] = scaleY;
transform.matrix[2][2] = scaleZ;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
3. 效果展示
测试代码如下:
void testScaleTransform3D() {
VERTEX3D vertex3D = { 1,1,2 };
VERTEX3D res = scaleTransform3D(vertex3D, 5, -2, 3);
cout << res.x << " " << res.y << " " << res.z << endl;
}

五、旋转变换

1. 旋转变换矩阵
旋转变换分为x、y、z三个方向上的旋转,遵循右手定则,拇指指向坐标轴的方向,手指的方向为正方向。
绕X轴旋转变换矩阵:
T R X = [ 1 0 0 0 0 c o s θ − s i n θ 0 0 s i n θ c o s θ 0 0 0 0 1 ] T_{RX}=\begin{bmatrix} 1&0&0&0\\ 0&cos\theta&-sin\theta&0\\ 0&sin\theta&cos\theta&0\\ 0&0&0&1\\ \end{bmatrix}\ TRX= 10000cosθsinθ00−sinθcosθ00001
绕Y轴旋转变换矩阵:
T R Y = [ c o s θ 0 s i n θ 0 0 1 0 0 − s i n θ 0 c o s θ 0 0 0 0 1 ] T_{RY}=\begin{bmatrix} cos\theta&0&sin\theta&0\\ 0&1&0&0\\ -sin\theta&0&cos\theta&0\\ 0&0&0&1\\ \end{bmatrix}\ TRY= cosθ0−sinθ00100sinθ0cosθ00001
绕Z轴旋转变换矩阵:
T R Z = [ c o s θ − s i n θ 0 0 s i n θ c o s θ 0 0 0 0 1 0 0 0 0 1 ] T_{RZ}=\begin{bmatrix} cos\theta&-sin\theta&0&0\\ sin\theta&cos\theta&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TRZ= cosθsinθ00−sinθcosθ0000100001
2. 代码实现
VERTEX3D rotationForXTransform3D(VERTEX3D vertex3D, double theta) {
Matrix qiciVertex(4, 1); // 转化为其次坐标
qiciVertex.matrix[0][0] = vertex3D.x;
qiciVertex.matrix[1][0] = vertex3D.y;
qiciVertex.matrix[2][0] = vertex3D.z;
qiciVertex.matrix[3][0] = 1;
Matrix transform; // 变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = cos(2 * PI * theta / 360);
transform.matrix[2][2] = cos(2 * PI * theta / 360);
transform.matrix[3][3] = 1;
transform.matrix[1][2] = -sin(2 * PI * theta / 360);
transform.matrix[2][1] = sin(2 * PI * theta / 360);
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
VERTEX3D rotationForYTransform3D(VERTEX3D vertex3D, double theta) {
Matrix qiciVertex(4, 1); // 转化为其次坐标
qiciVertex.matrix[0][0] = vertex3D.x;
qiciVertex.matrix[1][0] = vertex3D.y;
qiciVertex.matrix[2][0] = vertex3D.z;
qiciVertex.matrix[3][0] = 1;
Matrix transform; // 变换矩阵
transform.matrix[0][0] = cos(2 * PI * theta / 360);
transform.matrix[1][1] = 1;
transform.matrix[2][2] = cos(2 * PI * theta / 360);
transform.matrix[3][3] = 1;
transform.matrix[0][2] = sin(2 * PI * theta / 360);
transform.matrix[2][0] = -sin(2 * PI * theta / 360);
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
VERTEX3D rotationForZTransform3D(VERTEX3D vertex3D, double theta) {
Matrix qiciVertex(4, 1); // 转化为其次坐标
qiciVertex.matrix[0][0] = vertex3D.x;
qiciVertex.matrix[1][0] = vertex3D.y;
qiciVertex.matrix[2][0] = vertex3D.z;
qiciVertex.matrix[3][0] = 1;
Matrix transform; // 变换矩阵
transform.matrix[0][0] = cos(2 * PI * theta / 360);
transform.matrix[1][1] = cos(2 * PI * theta / 360);
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
transform.matrix[0][1] = -sin(2 * PI * theta / 360);
transform.matrix[1][0] = sin(2 * PI * theta / 360);
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
3. 效果展示
测试代码如下:
void testRotationForXTransform3D() {
VERTEX3D vertex3D = { 1,1,1 };
VERTEX3D res = rotationForXTransform3D(vertex3D, 135);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testRotationForYTransform3D() {
VERTEX3D vertex3D = { 1,1,1 };
VERTEX3D res = rotationForYTransform3D(vertex3D, 135);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testRotationForZTransform3D() {
VERTEX3D vertex3D = { 1,1,1 };
VERTEX3D res = rotationForZTransform3D(vertex3D, 135);
cout << res.x << " " << res.y << " " << res.z << endl;
}
三个测试代码分别表示沿x,y,z轴旋转135度。

六、对称变换
对称变换包括关于xoy、yoz、zox三个平面对称,还包括,关于x轴、y轴、z轴对称,变换矩阵分别如下:
1. 关于坐标平面对称变换矩阵
关于xoy平面对称,因此x、y坐标不变,z坐标变为相反数(-z):
T F x y = [ 1 0 0 0 0 1 0 0 0 0 − 1 0 0 0 0 1 ] T_{Fxy}=\begin{bmatrix} 1&0&0&0\\ 0&1&0&0\\ 0&0&-1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFxy= 1000010000−100001
同理可得,关于yoz平面对称:
T F y z = [ − 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 ] T_{Fyz}=\begin{bmatrix} -1&0&0&0\\ 0&1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFyz= −1000010000100001
关于zox平面对称:
T F z x = [ 1 0 0 0 0 − 1 0 0 0 0 1 0 0 0 0 1 ] T_{Fzx}=\begin{bmatrix} 1&0&0&0\\ 0&-1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFzx= 10000−10000100001
2. 关于坐标轴对称变换矩阵
关于x轴对称,因此x坐标不变,y、z坐标变为相反数(-y、-z):
T F x = [ 1 0 0 0 0 − 1 0 0 0 0 − 1 0 0 0 0 1 ] T_{Fx}=\begin{bmatrix} 1&0&0&0\\ 0&-1&0&0\\ 0&0&-1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFx= 10000−10000−100001
同理可得,关于y轴对称:
T F y = [ − 1 0 0 0 0 1 0 0 0 0 − 1 0 0 0 0 1 ] T_{Fy}=\begin{bmatrix} -1&0&0&0\\ 0&1&0&0\\ 0&0&-1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFy= −1000010000−100001
关于z轴对称:
T F z = [ − 1 0 0 0 0 − 1 0 0 0 0 1 0 0 0 0 1 ] T_{Fz}=\begin{bmatrix} -1&0&0&0\\ 0&-1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TFz= −10000−10000100001
3. 代码实现
/// 比例变换后的三维点坐标
VERTEX3D symmetryForXTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = -1;
transform.matrix[2][2] = -1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 比例变换后的三维点坐标
VERTEX3D symmetryForYTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = -1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = -1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 比例变换后的三维点坐标
VERTEX3D symmetryForZTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = -1;
transform.matrix[1][1] = -1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 比例变换后的三维点坐标
VERTEX3D symmetryForXOYTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = -1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 比例变换后的三维点坐标
VERTEX3D symmetryForYOZTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = -1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 比例变换后的三维点坐标
VERTEX3D symmetryForZOXTransform3D(VERTEX3D vertex3D) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = -1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
4. 效果展示
坐标点(4,3,2)关于坐标平面、坐标轴对称的结果如下:

测试代码如下:
void testSymmetryForXTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForXTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testSymmetryForYTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForYTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testSymmetryForZTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForZTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testSymmetryForXOYTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForXOYTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testSymmetryForYOZTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForYOZTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
void testSymmetryForZOXTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = symmetryForZOXTransform3D(vertex3D);
cout << res.x << " " << res.y << " " << res.z << endl;
}
七、错切变换
错切变换同样分为3种,分别为x、y、z三个方向进行变换。具体变换矩阵如下:
1. 变换矩阵
关于x方向错切,y、z坐标不会发生变换,x坐标发生变化的幅度会收到y、z坐标大小的影响,y、z越大,发生变换的程度也越大。
T S H x = [ 1 b c 0 0 1 0 0 0 0 1 0 0 0 0 1 ] T_{SHx}=\begin{bmatrix} 1&b&c&0\\ 0&1&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TSHx= 1000b100c0100001
T S H y = [ 1 0 0 0 d 1 f 0 0 0 1 0 0 0 0 1 ] T_{SHy}=\begin{bmatrix} 1&0&0&0\\ d&1&f&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TSHy= 1d0001000f100001
T S H z = [ 1 0 0 0 0 1 0 0 g h 1 0 0 0 0 1 ] T_{SHz}=\begin{bmatrix} 1&0&0&0\\ 0&1&0&0\\ g&h&1&0\\ 0&0&0&1\\ \end{bmatrix}\ TSHz= 10g001h000100001
2. 代码实现
/// 变换后的点
VERTEX3D miscutForXTransform3D(VERTEX3D vertex3D, double miscutY, double miscutZ) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 平移变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 错切量
transform.matrix[0][1] = miscutY;
transform.matrix[0][2] = miscutZ;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 变换后的点
VERTEX3D miscutForYTransform3D(VERTEX3D vertex3D, double miscutX, double miscutZ) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 平移变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 错切量
transform.matrix[1][0] = miscutX;
transform.matrix[1][2] = miscutZ;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
/// 变换后的点
VERTEX3D miscutForZTransform3D(VERTEX3D vertex3D, double miscutX, double miscutY) {
Matrix qiciVertex = vertex3D2qici(vertex3D); // 转化为其次坐标
Matrix transform; // 平移变换矩阵
transform.matrix[0][0] = 1;
transform.matrix[1][1] = 1;
transform.matrix[2][2] = 1;
transform.matrix[3][3] = 1;
// 错切量
transform.matrix[2][0] = miscutX;
transform.matrix[2][1] = miscutY;
// 进行变换得到齐次坐标结果
Matrix qicires = dotMatrix(transform, qiciVertex);
// 将齐次坐标转化为三维点坐标
VERTEX3D res;
res.x = qicires.matrix[0][0];
res.y = qicires.matrix[1][0];
res.z = qicires.matrix[2][0];
return res;
}
void testMiscutTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = miscutForZTransform3D(vertex3D, 2, 2);
cout << res.x << " " << res.y << " " << res.z << endl;
}
3. 效果展示
测试代码如下:
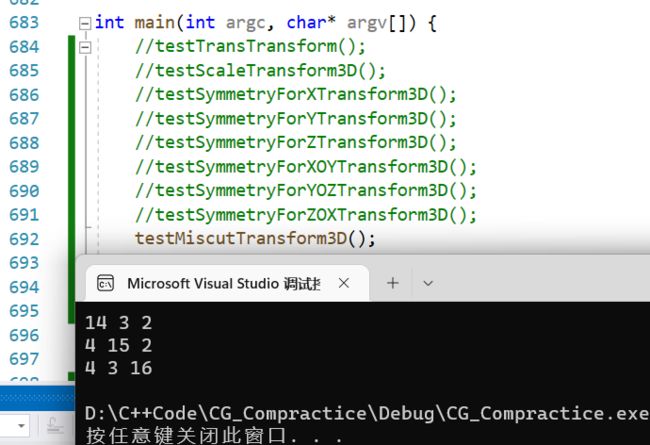
void testMiscutTransform3D() {
VERTEX3D vertex3D = { 4,3,2 };
VERTEX3D res = miscutForXTransform3D(vertex3D, 2, 2);
cout << res.x << " " << res.y << " " << res.z << endl;
res = miscutForYTransform3D(vertex3D, 2, 2);
cout << res.x << " " << res.y << " " << res.z << endl;
res = miscutForZTransform3D(vertex3D, 2, 2);
cout << res.x << " " << res.y << " " << res.z << endl;
}
八、相对任意参考点的复合变换
相对于参考点F(xf,yf,zf)作比例、旋转、错切等变换的过程分为以下三步:
(1)将参考点F移至坐标原点;
(2)针对原点进行三维几何变换;
(3)进行反平移。
九、相对任意方向的复合变换
针对任意方向轴的变换的五个步骤:
①使任意方向轴的起点与坐标原点重合,此时进行平移变换。
②使方向轴与某一坐标轴重合,此时需进行旋转变换,且旋转变换可能不止一次。
③针对该坐标轴完成变换。
④用逆旋转变换使方向轴回到其原始方向。
⑤用逆平移变换使方向轴回到其原始位置。

the end……
三维图形的几何变换到这里就要结束啦~~到此既是缘分,欢迎您的点赞、评论、收藏!关注我,不迷路,我们下期再见!!
我是Cherries,一位计算机科班在校大学生,写博客用来记录自己平时的所思所想!
内容繁杂,又才疏学浅,难免存在错误,欢迎各位大佬的批评指正!
我们相互交流,共同进步!
注:本文由
非妃是公主发布于https://blog.csdn.net/myf_666,转载请务必标明原文链接:https://blog.csdn.net/myf_666/article/details/129847063