★★智驾/智舱域控制器
1.tuning
tuning(调谐频率):修改算法参数,让画质达到最优
2.摄像头连接

同轴电缆供电(PoC),供电电压8V,每路GMSL提供0.6A
Sensor--->ISP(摄像头集成ISP)--->串行器(STP/coax)--->解串器--->MIPI--->Xavier Mipi
Maxim serdes芯片
板内选用GMSL解串器MAX9286,Camera端选用的串行器为MAX96705,MAX9286可支持四路串行输入,每路的最高速率为1.5Gbps,将串行输入解串为4个lane的CSI-2输出以与主控制器通过MIPI连接。MAX9286可支持全速15m的传输距离。
MAX9286的功能为:将收到的CML串行数据进行均衡优化之后再进行串并转化之后进行8b/10b编码,随后再将并行数据转化为IMIPI CSI-2数据输出到主控制器。

3.mipi测试
分为D-PHY物理层测试和逻辑层测试
4.mipi协议
应用层,协议层,物理层组成
5.相机传输接口(车用传输总线)
MIPI CSI-2,FPD Link,GMSL,LVDS
6.Seneor
像素:
400万(OV4689),500W(OS05A10),230万(AR0234CS)
输出格式(图像数据格式):
10-bit RAW RGB
前视数据:彩色(色彩模式RGB),JPEG压缩
选型:
焦距,分辨率,输出格式,帧率,光学格式,快门式,像素大小,输出接口,色度
前中:焦距6mm,分辨率1920*1080
几路:
1路GMSL接口摄像机,1280x720,POC
实现4路GMSL协议摄像机接口,每路最大分辨率1920*1080@30Hz
2个基于Fakra的摄像头接口
7.华为
昇(shēng)腾310,910
智驾域控MDC平台
8.高通
智舱:SA8155P,SA8295,SA602A
9.安霸
智驾(L2-L4):CV3
电子后视镜:A12
10.FPGA
主处理芯片:XAZU5EV
主要实现系统的整体控制以及数百万行代码算法
ARM Cortex A53核,主要用于算法类相关的应用处理器
ARM Cortex-R5核,主要用于IO相关的实时处理器
Mali-400 MP2 GPU,主要用于图像处理相关的协处理
FPGA适合做算法的开发测试(基于快速上车考虑,FPGA架构本身很灵活,聚焦泊车,更容易帮助百度发挥自动驾驶的能力)
11.应用车型
2020年12月:第一代五仁(XAZU5EV;自主泊车L4)--->威马--->广汽,长城,现代


2021年底:第二代四喜(单,双TDA4VM;自主泊车+停车场自主泊车)
2023年:第三代三鲜(单,双Orin-X(NVIDIA DRIVE Orin);停车场自主泊车+领航辅助驾驶)
车型:威马W6(ZU5);集度ROBO-01(L4,在2023年上市)
ANP 2.0全套方案:威马,比亚迪,岚图,广汽
ANP部分软件:长城
ACU量产生产线年产20万套,支持5路摄像头,12路超声波雷达,预留毫米波雷达和激光雷达接口
12.高精地图
域控应用:



基于高精数据服务平台提供的高精地图(含本地存储和网络存储)服务引擎提供的高精地图道路特征,结合Camera采集的影像信息通过AI算法进行道路特征识别得到的道路特征(车道线,方向标等),进行特征匹配,得到相对视觉定位结果,在通过IMU设备进行组合导航定位,通过安全MCU产出定位结果
其他应用:
自主泊车
仿真测试
自动驾驶
V2X
13.高精地图定位精度
惯性导航(INS):
全球导航卫星定位系统(GNSS)
高精地图与线上激光雷达点云匹配定位
轮式传感器(里程计)
结合车辆运动特性的运动约束
14.域控注意
算力(AI算力,逻辑算力)
Memory带宽
能效比
接口资源需求
车规与功能安全
15.ISO7637
汽车电子EMC/EMI测试规范
第一部分:定义相关
第二部分:测试内容,侧重电源线上的传到电磁干扰
第三部分:感性或容性耦合在除电源线之外其他线上的电磁干扰测试规范
16.遇过问题
水波纹
摩尔纹:相机空间频率和物体频率一致或接近(通过软件和摄像头参数调节减轻)
电压不稳:供电不稳定
电磁干扰:电磁干扰导致信号不稳定
17.SoC数量
单SoC方案:
支持L2+级行泊一体方案
L1-L2+级驾驶辅助功能
多SoC方案(系统安全冗余设计):
主SoC+备份SoC/MCU(L2+)
主计算单元:常态化计算
安全监控和应急处理备份计算单元,主计算出问题,备份用于控车,主流方案
主域控+副域控(L3及以上)
18.DV和PV
DV:设计开发阶段中进行测试
PV:正式生产阶段
19.FMEA和DFMEA
FMEA:在产品和过程设计,开发前如何识别和降低可能产生的失效
RPN(风险顺序度数)
RPN=(S)*(O)*(D)
S=严重度
O=频度
D=探测度
DFMEA:设计潜在的失效模式及后果分析
18.SoC实现等级
Orin(L2-L5)
征程2,3(L1-L2)
TDA4VM:L2/L3
20.GPS
走线方式:微带线,共面波导
50Ω阻抗
与射频引脚相邻的GND引脚不做热焊盘,要与地充分接触
射频引脚到RF连接器之间的距离应尽量短;同时避免直角走线,夹角为135度
连接器件封装建立时要注意,信号脚离地要保持一定距离
射频信号线参考的地平面应完整;在信号线和参考地
选型:
工作频率
辐射方式
增益:输入功率相等,实际天线与理想天线的辐射单元在空间同一点处所产的信号的功率密度之比,定量描述天线把输入功率集中辐射的程度,增益越高,电波传播距离越远
21.EMC
发射类:
辐射发射
低频磁场发射
射频传导发射
抗扰类:
辐射抗扰
磁场抗扰
模拟车载发射机
电源线/信号线瞬态抗扰
静电放电
合理导线宽度
环路最小
短线
时钟线包地或紧邻
接口滤波,防护,隔离器件靠近接口,遵从先防护,后滤波原则
晶体,晶振,继电器,开关电源强辐射距面板,连接器边缘>=1000mil,距板内屏蔽罩,外壳>=500mil
数字模拟,高速低速,分开布局
EMI:
辐射发射(RE)
传导发射(CE)
增加差模滤波,电感,电容
CE:
共模电容滤波
共模电容接地点,减小共模环路及接地阻抗
减少近场耦合
RE:
端口高频滤波电容
加强电源参考地与机壳搭接
开关上升沿调整(影响效率)
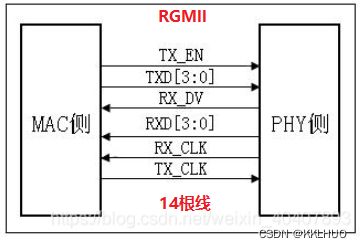
22.以太网
加GND线,可消除共模电流部分磁场
共模电感:不影响差动信号,降低共模噪声
RGMII,RMII
SGMII(ZU5)

LAYOUT:
Hi3516D:
避免走线穿越电源分割区,保持参考平面完整
信号线长度以时钟线为基准,长度偏差±200mil以内
变压器正下方地挖空
相邻信号走线间距3W原则
建议时钟上串联一个33Ω获取更好信号质量
MDI+_0-3,MDI-_0-3差分线对等长<5mil,差分阻抗100Ω±10%
Hi3519:
RGMII_TXD[0:3],RGMII_TX_EN线长以RGMII_TX_CLK线长为基准,<500mil
RGMII_RXD[0:3],RGMII_RX_DV线长以RGMII_RX_CLK线长为基准,<500mil
J3:
RGMII_TXD[0:3],RGMII_TX_EN线长以RGMII_TX_CLK线长为基准,误差在±500mils范围内,阻抗为50Ω
RGMII_RXD[0:3],RGMII_RX_DV线长以RGMII_RX_CLK线长为基准,误差在±500mils范围内,阻抗为50Ω
TDA4
SGMII
QSGMII(四以太网):四个以太网PHYs到单个串行流的组合


22.电源
BUCK:
闭合:电源--->开关--->电感--->电容

打开:电感--->电容--->二极管

LAYOUT:
输入端地和GND引脚短而粗
输入端电容和IN引脚短而粗
SW噪声源远离敏感模拟区域FB
二极管,电感靠近SW,路径最小化,输出电容靠近电感
电阻接近IC,布线最小长度
23.开关频率
优:体积小(电容电感小),瞬时响应快,纹波小(频宽变大)
劣:输出电压大(无法满足低电压),效率低(损耗大)
24.波特图(环路稳定性)测试
测试方法:
在电源环路中串联一个小电阻R5
在电阻上施加一个微小的交流信号
测量电阻两端电压的幅值和相位
改变交流信号的频率,获得环路增益的幅频和相频曲线


25.30dB功率
dB=10lg(输出功率W/输入功率W),电压或电流dB=20lg()
如:10lgx=30dB,lgx=3dB,x=10^3=1000
26.输出纹波
Hi3516A:
core电源有4种:
Media(Media电源):1.1V(0.95-1.1),≥2A
DDR(DDR内核电源) :1.1V(1.01-1.1),≥1A
CPU(CPU电源):1.1V(0.99-1.3),≥1A
VDD(内核电压):1.1V(1.01-1.1),≥1A
输入5V,输出1.8V,3A--->最多20mV纹波电压_(大约输出电压1%)
CPU供电(1.2V,0.8V)--->30mV以内
要求:纹波≤1%
27.传感器
摄像头:左前2,右前2,后1
点云:左前1,右前1,后1
超声波雷达:前4,后4,左4,右4
毫米波雷达:前1
28.IMU
数据更新频率≥100Hz
加速度量程≥±5g
零偏稳定性≤10mg
陀螺角速度量程≥±500°/S
零偏稳定性1dps
29.MCU
主要用板卡的安全功能,实现板卡状态的监控以及安全CAN接口的控制
主要负责安全相关功能,主要提供车载以太网接口,CAN通信接口以及板卡上的状态检测功能
英飞凌Aurix 297T(32位)
30.FLASH
Micron(美光) SPI Nor flash
2片QSPI Nor flash,工作频率100MB/s,总共容量128MB
系统存储:Micron(美光) eMMC
31.DDR
Micron(美光) DDR4
PS:4GB 64-bit DDR4,2400Mbps
PL:32bit DDR4,2400Mbps
32.以太网
RGMII,MII
USB PHY,100M 车载以太网PHY,1000M ETH PHY,以太网Switch
33.CAN
CAN接口,用于实现车辆信息的获取以及外部接口的扩展
CAN2.0接口,连接到MCU
CANFD接口,连接到MCU
CAN transceiver(收发器)
本系统总共提供6路CAN接口,其中FPGA支持两路CAN,AURIX支持两路CAN FD和两路CAN接口。
外部CAN总线是5V,板内的CAN总线是3.3V,CAN Transceiver可支持CAN FD速率高达5Mbit/s。
33.电压
KL30:蓄电池供电电压
KL15:点火信号
汽油车,工作电压9-18V
33.温度
汽车级芯片工作温度ta(环境温度)105°或以上
工作温度-45度到60度
系统工作温度:-40℃到+70℃
34.电容
不适用:
铝电解质电容;Y5V,Z5U级别陶瓷电容(Y5V,Z5U能用级(Ⅲ)的介质材料)
适用:
X7R,NPO,COG级别陶瓷电容(NPO,COG超稳定级(Ⅰ类)的介质材料;X7R稳定级(II类)的介质材料)
35.尺寸
230mm x 180mm x 2mm
35.ESD
外部接口抗±8KV(摄像机,CAN,ON信号)
调试接口抗±2KV
36.SPI
工作频率15MHz
37.GPS
位置精度≤3m
数据更新频率2Hz
授时精度≤1ms
37.RIDAR
前毫米波雷达:大陆ARS 408-21
38.帧率
实时影像输入,每秒15帧以上
38.功率
功率争取不超过15W
系统功耗小于50W
39.系统架构

40.标准
必须钳位/滤除高压电快速脉冲并保持正常工作。这些脉冲包括抛负载瞬变(可达38V)和ISO7637-2(电源线瞬态传导干扰抗扰性试验)中列出的其他瞬变。
满足ISO 16750-2(电气和电子设备的环境条件和试验.第2部分电力负载)要求的反接保护、跨接启动保护以及冷启动。
兼容CISPR 25(车辆,船和内燃机 无线电骚扰特性 用于保护车载接收机的限值和测量方法)汽车EMI标准。
EMI滤波器电路如下图所示,采用Pi型滤波器来降低后级电路的EMI,以满足CISPR 25(电磁兼容)要求。
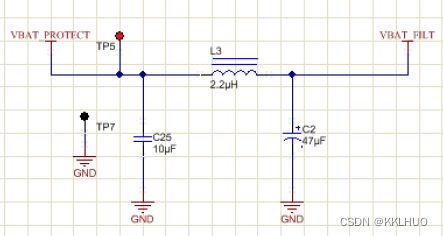
EMI滤波器电路