Paddle训练yolov3 识虫小结
文章目录
- 前言
- 数据分析
- 数据增广
- 网络结构
- 训练技巧
-
- Mish激活函数
- 学习率调整策略
- 对预测结果的改进
- 对YOLO的一些思考
- 总结
前言
第一次参加AI studio 的新手赛,还是蛮激动的。这次比赛要检测的内容本身比较简单,但是时间是真的赶,我开始做的时候只有不到一周时间。
由于之前没有参加过这类比赛,所以手头上没什么现成的资料。虽然可以从网上找,但是找的不一定符合要处理数据的格式,所以还得在原有的基础上改进,比如这次就写了个mosaic增广的函数。至于测mAP的函数到现在还每弄好,文档给的API也没法直接用。
大体说一下思路。
数据分析
数据处理部分可以直接找到源码,基本不需要改动,这里简单的对原始数据进行分析。以便搞明白我们做的任务的数据是什么样的。
| 名称 | 数量(张) |
|---|---|
| 训练集 | 1693 |
| 验证集 | 245 |
| 测试集 | 245 |
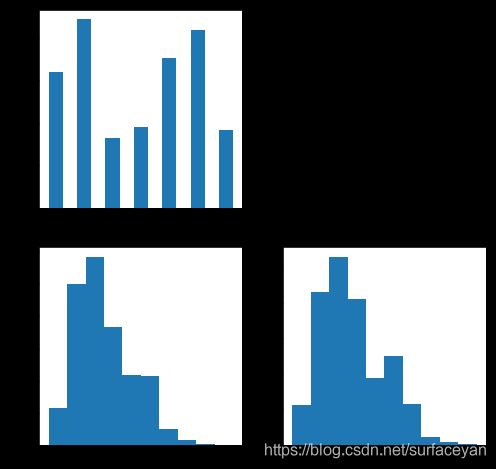
下面这张图片显示的是训练集的数据分布情况:
左上角的是统计的训练集中不同类别的真实框数量。类别还算是比较均衡。
下边两张图分别是所有方框的宽度和高度的相对值,可以看到,方框的wh大都小于0.15,所以这次检测的对象都是小目标。
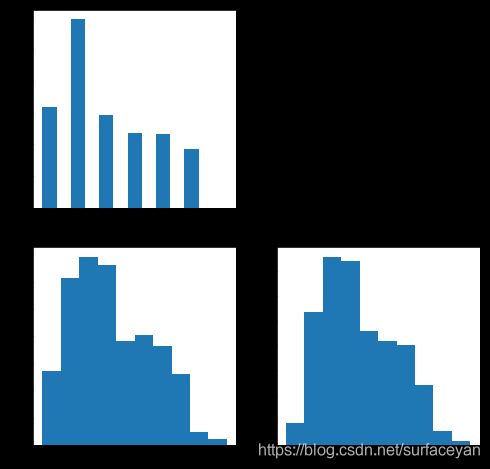
下面这张图就是验证集的统计信息了。在验证集中没有最后一个类别的框,这可能导致验证评估的时候,对最后一个类的结果不能正确评估,所以验证集可以简单的处理一下,从训练集抽取一部分包含最后一个类的真实框,随机贴到验证集的图中,从而生成新的验证集。
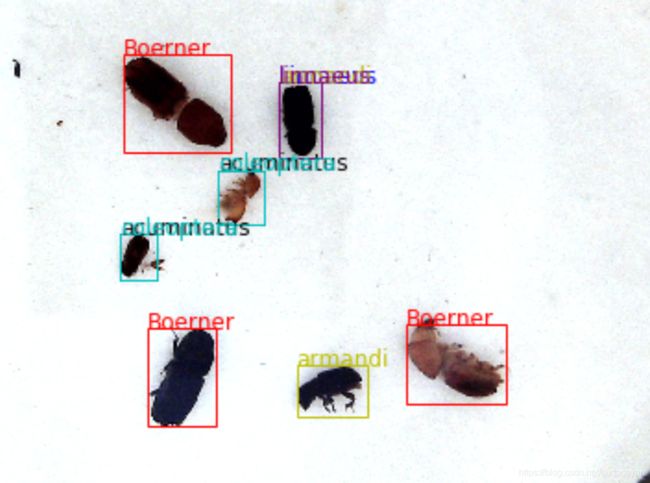
下面再来直观感受一下检测目标
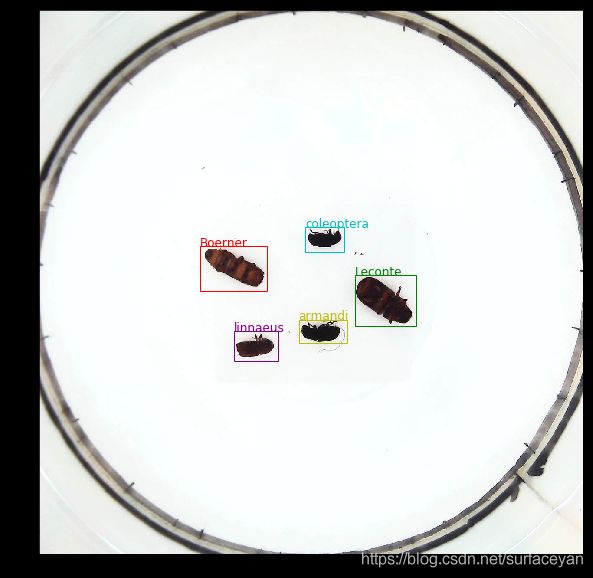
训练集和测试集都是比较大的正方形的图,背景都是白色的器皿,虫子较为分散的躺在器皿内。
检测目标大都很小,所以要注重小目标的检测问题。
数据增广
在AI识虫比赛中,老师已经提供了多个数据增广的策略,包括随机色彩变换、随机填充、随机裁剪、随机缩放、随机翻转、真实框随机顺序、随机多尺度训练共七种策略,其中随机填充、随机裁剪、随机翻转需要同时对真实框进行处理,保证真实框永远与相应的物体对应。
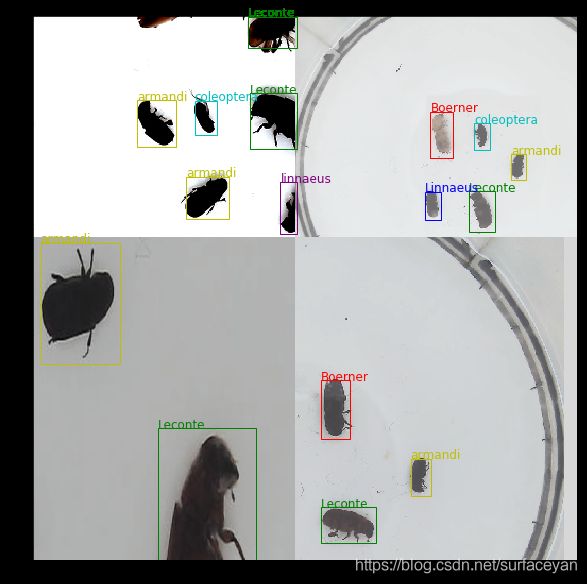
我又添加了竖直翻转、水平竖直平移和马赛克增广方法。
据说马赛克增广可以改善小目标的检测精度。
经过处理后的数据:
附上马赛克数据增广的python源码:
#从输入的batch中随机的选择4张图片,总共选择batch次产生batch张马赛克图片
#注意batch的选取,保证每个step中的batch > 4,否则报错 raise ValueError("Sample larger than population")
# 马赛克数据增广
def merge_bboxes(img, gt_boxes, gt_labels, cutx, cuty):
"""
gt_boxes.shape = [4, max_box, 4]
gt_labels.shape = [4, max_box]
img.shape = [4, C, H, W]
以下代码还可以精简
"""
max_box = 50 # 一张图中最大方框数,不够补零,多了截取
cutx = cutx / img.shape[3]
cuty = cuty / img.shape[2]
merge_bbox = []
merge_label = []
for i in range(len(gt_boxes)):
x,y,w,h = gt_boxes[i, :, 0], gt_boxes[i, :, 1], gt_boxes[i, :, 2], gt_boxes[i, :, 3]
x1, y1, x2, y2 = x-w/2, y-h/2, x+w/2, y+h/2
# 0 3
# 1 2
if i == 0:
x1 = np.minimum(x1, cutx)
y1 = np.minimum(y1, cuty)
x2 = np.minimum(x2, cutx)
y2 = np.minimum(y2, cuty)
boolw = x2 - x1 < 0.003
boolh = y2 - y1 < 0.003
bool_ = boolw + boolh
gt_labels[i][bool_] = 0
x, y, w, h = (x1+x2)/2, (y1+y2)/2, x2-x1, y2-y1
x[bool_] = 0
y[bool_] = 0
w[bool_] = 0
h[bool_] = 0
if i == 1:
x1 = np.minimum(x1, cutx)
y1 = np.maximum(y1, cuty)
x2 = np.minimum(x2, cutx)
y2 = np.maximum(y2, cuty)
boolw = x2 - x1 < 0.003
boolh = y2 - y1 < 0.003
bool_ = boolw + boolh
gt_labels[i][bool_] = 0
x, y, w, h = (x1+x2)/2, (y1+y2)/2, x2-x1, y2-y1
x[bool_] = 0
y[bool_] = 0
w[bool_] = 0
h[bool_] = 0
if i == 2:
x1 = np.maximum(x1, cutx)
y1 = np.maximum(y1, cuty)
x2 = np.maximum(x2, cutx)
y2 = np.maximum(y2, cuty)
boolw = x2 - x1 < 0.003
boolh = y2 - y1 < 0.003
bool_ = boolw + boolh
gt_labels[i][bool_] = 0
x, y, w, h = (x1+x2)/2, (y1+y2)/2, x2-x1, y2-y1
x[bool_] = 0
y[bool_] = 0
w[bool_] = 0
h[bool_] = 0
if i == 3:
x1 = np.maximum(x1, cutx)
y1 = np.minimum(y1, cuty)
x2 = np.maximum(x2, cutx)
y2 = np.minimum(y2, cuty)
boolw = x2 - x1 < 0.003
boolh = y2 - y1 < 0.003
bool_ = boolw + boolh
gt_labels[i][bool_] = 0
x, y, w, h = (x1+x2)/2, (y1+y2)/2, x2-x1, y2-y1
x[bool_] = 0
y[bool_] = 0
w[bool_] = 0
h[bool_] = 0
gt_boxes[i,:,0] = x
gt_boxes[i,:,1] = y
gt_boxes[i,:,2] = w
gt_boxes[i,:,3] = h
#TO DO:eliminate small boxes
#may be no boxes
#合并所有非0的box
for i in range(len(gt_boxes)):
for idx,box in enumerate(gt_boxes[i]):
if box[2]!=0 and box[3]!=0:
merge_bbox.append(box)
merge_label.append(gt_labels[i,idx])
merge_bbox = np.array(merge_bbox)
merge_label = np.array(merge_label)
if len(merge_bbox) == 0:
return np.zeros((max_box, 4), dtype='float32'), np.zeros((max_box,), dtype='int32')
if len(merge_bbox) < max_box: #
outs1 = np.zeros((max_box, 4), dtype='float32')
outs1[:len(merge_bbox), :] = merge_bbox
outs2 = np.zeros((max_box,), dtype='int32')
outs2[:len(merge_bbox)] = merge_label
return outs1, outs2
else:
return merge_bbox[:max_box], merge_label[:max_box]
def mosaic(img, gt_boxes, gt_labels): #
"""
对接
for i, data in enumerate(train_loader()):
img, gt_boxes, gt_labels, img_scale = data
img, gt_boxes, gt_labels = mosaic(img, gt_boxes, gt_labels)
img.shape = [N, C, H, W]
gt_boxes.shape = [N, max_len, 4]
gt_labels = [N, max_box ]
"""
n = len(img)
cut_x, cut_y = [0]*n, [0]*n
random_index = np.random.rand() * 0.3 + 0.35
min_offset = 0.2
for i in range(n):
h = img.shape[2]
w = img.shape[3]
cut_x[i] = np.random.randint(int(w*min_offset), int(w*(1 - min_offset)))
cut_y[i] = np.random.randint(int(h*min_offset), int(h*(1 - min_offset)))
#cut_x[i] = random.uniform(min_offset, (1-min_offset))
#cut_y[i] = random.uniform(min_offset, (1-min_offset))
augmentation_calculated, gaussian_noise = 0, 0
def get_random_imgs():
random_index = random.sample(list(range(n)), 4) # 4张图片混合
mosaic_img = []
mosaic_gt_boxes = []
mosaic_gt_labels = []
for idx in random_index:
mosaic_img.append(img[idx])
mosaic_gt_boxes.append(gt_boxes[idx])
mosaic_gt_labels.append(gt_labels[idx])
return np.array(mosaic_img).astype('float32'), \
np.array(mosaic_gt_boxes).astype('float32'), np.array(mosaic_gt_labels).astype('int32')
# n images per batch, we also generate n images if mosaic
dest = []
new_boxes = []
new_labels = []
for i in range(n):
mosaic_img, mosaic_gt_boxes, mosaic_gt_labels = get_random_imgs()
img0 = mosaic_img[0]
img1 = mosaic_img[1]
img2 = mosaic_img[2]
img3 = mosaic_img[3]
#cut and adjust
d1 = img0[ :, :cut_y[i], :cut_x[i] ]
d2 = img1[ :, cut_y[i]:, :cut_x[i] ]
d3 = img2[ :, cut_y[i]:, cut_x[i]: ]
d4 = img3[ :, :cut_y[i], cut_x[i]: ]
tmp1 = np.concatenate([d1, d2], axis=1)
tmp2 = np.concatenate([d4, d3], axis=1)
dest.append(np.concatenate([tmp1, tmp2], axis=2))
#print(bboxes)
tmp_boxes, tmp_labels = merge_bboxes(mosaic_img, mosaic_gt_boxes, mosaic_gt_labels, cut_x[i], cut_y[i])
new_boxes.append(tmp_boxes)
new_labels.append(tmp_labels)
dest = np.array(dest).astype('float32')
new_boxes = np.array(new_boxes).astype('float32')
new_labels = np.array(new_labels).astype('int32')
return dest, new_boxes, new_labels
网络结构
YOLO的网络可分为 backbone、neck和prediction三部分:
下面这张图是YOLOV4中的:
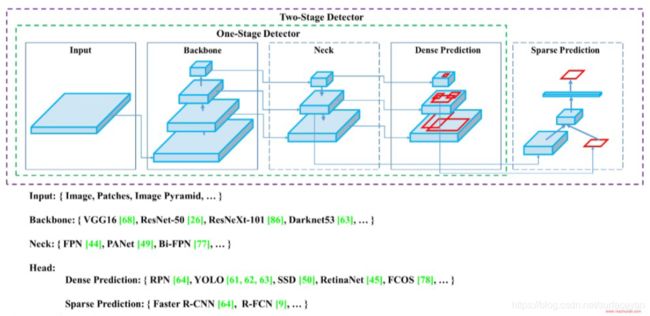
我们可以对网络中的每个部分分别进行优化,尝试更为优秀的网络结构,尤其可以先尝试哪些对小目标检测效果好的网络。
听说有人把darknet53换成了ResNet50-vd可以提高n个百分点。
我将YOLOv3的骨干网络换成了resnet50
此时需要将输出结果改成和原来的darknet53一样的格式,原来的格式:
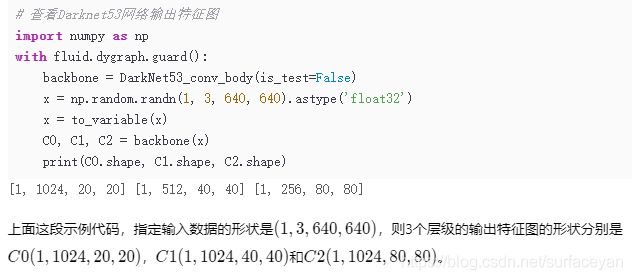
查看一下resnet50的输出结果:
import numpy as np
with fluid.dygraph.guard():
backbone = ResNet()
x = np.random.randn(1, 3, 640, 640).astype('float32')
x = fluid.dygraph.to_variable(x)
y = backbone(x)
print(y.shape) # [1, 1] 结果不符合要求
# 将forwar方法改成:
def forward(self, inputs):
outs = []
y = self.conv(inputs)
y = self.pool2d_max(y)
for i, bottleneck_block in enumerate(self.bottleneck_block_list):
y = bottleneck_block(y)
# print(i, y.shape)
if i == 6 or i == 9 or i == 15:
outs.append(y)
# y = self.pool2d_avg(y)
# y = fluid.layers.reshape(y, [y.shape[0], -1])
# y = self.out(y)
# print(len(self.bottleneck_block_list))
return outs[2], outs[1], outs[0] # 将C0, C1, C2作为返回值
我把残差块的顺序调了调,使之看上去更为合理

之后更改通道数

此时resnet50的输出格式和原来的darknet53格式相同。
将原来的骨干网络部分注释掉一部分,将resnet50代码copy进去,再改改错误应该就能正常用了。
训练技巧
Mish激活函数
yolov3中用的激活函数是leak_relu,这个函数相对relu提高并不明显。
人们对激活函数的研究一直没有停止过,ReLU还是统治着深度学习的激活函数,不过,这种情况有可能会被Mish改变。 Diganta
Misra的一篇题为“Mish: A Self Regularized Non-Monotonic Neural Activation
Function”的新论文介绍了一个新的深度学习激活函数,该函数在最终准确度上比Swish(+.494%)和ReLU(+
1.671%)都有提高。
https://blog.csdn.net/u011984148/article/details/101444274
再结合前几个月发布的YOLOv4也使用了Mish激活,用mish似乎是个不错的选择,可以尝试将原来的leak_relu替换成mish。
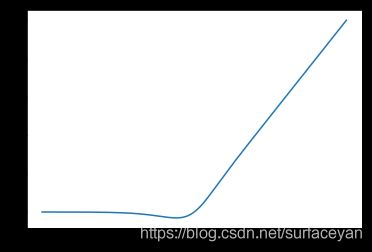
这个函数和relu很像,但解决了0点不可导的问题。
with fluid.dygraph.guard():
x = fluid.layers.linspace(-10, 10, 1000, dtype='float32')
mish = x * fluid.layers.tanh( fluid.layers.log( 1 + fluid.layers.exp(x) ) )
学习率调整策略
总结一下就是,在开始训练的时候用linear_lr_warmup,可以使初期网络训练更加稳定;在中期用piecewise_decay;在后期使用余弦衰减策略,不仅可以让学习率变化更加平滑,还能提供周期性变化的学习率,使网络跳出局部最优。
当然,凡事无绝对,实际上还有很多的学习率衰减策略,这需要“具体问题具体分析“。
#前期
warmup_steps = 50
start_lr = 1. / 3.
end_lr = 0.1
decayed_lr = fluid.layers.linear_lr_warmup(learning_rate,
warmup_steps, start_lr, end_lr)
#中期
boundaries = [1000, 2000]
lr_steps = [0.1, 0.01, 0.001]
learning_rate = fluid.layers.piecewise_decay(boundaries, lr_steps)
#后期
lr = fluid.layers.cosine_decay( learning_rate = , step_each_epoch = , epochs = )
对预测结果的改进
当网络已经够训练的良好的时候可以对预测的一些参数做一些调整。
我们的测试集中的虫子数不超过20个,可以适当的调整预测框的个数,提高丢去阈值,去掉得分过低的框。
另外,两个虫子之间框的iou不可能很大,不存在两条虫子叠加在一起的情况,此时可以适当调整multi class nms的阈值,去掉多余的重复框,以及给最后的结果添加不同类别高iou值框去除的函数。
为了进一步提高分类准确率,可以单独训练一个分类网络用于分类框选中的物体类别。
尝试多模型融合提升准确率。
另外再提一下,multi class nms算法存在一个问题,如图:
如果一个框中有多个类别的预测概率都很高,那么这个框可能会被重复使用。当然理论上一个训练良好的网络不应该出现这种情况,但现实是残酷的,它就会有这种情况,这时候单独训练的分类网络就起了作用。
对YOLO的一些思考
yolo和下面的检测方法有些相似。
https://blog.csdn.net/surfaceyan/article/details/108085893
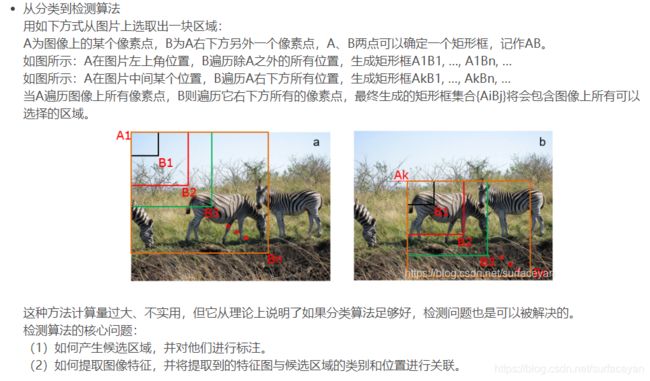
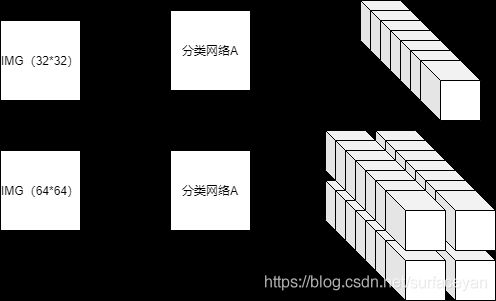
如果恰巧有个分类网络A,他的输入尺寸也是 32 × 32,输出是维度为c的向量。
如下图,我把分类网络A的输出画成了[1 * 1 * c]的格式,图中每个小方格代表一个数。
当输入为 [32, 32]时,输出为[1,1,c], 当输入为[64, 64]时,输出为[2,2,c] ;
当输入为 [608, 608]时,输出为[19,19,c], 如果我们让这个分类网络对同一张图预测3次,把结果合并,那么输出为[19,19,3,c]。如果我们让它预测出c+5个类别而不是c各类别,那么它的输出就变成了 [19, 19, 3, c+5],如果规定[h,w, i, 4:]代表预测的类别概率,[h,w, i, 4]代表这张图中有没有要分类的物体,[h,w, i, :3]代表某种回归,那么。。。这不就是YOLO吗。。。
如果把yolo看成一个分类的网络,那么它输入图像的尺寸应该是(只考虑第一个尺度)[32 × 32],即,感受野大小。
如果我们把输入图像划分的小方格输入到yolo网络中应该会得到该方格对应的类别概率,objectness等,但实际上输入一个放格和一张图片是完全不同的,应为邻近的方格之间会相互影响,最终影响到输出。
(部分内容剧烈变化,几乎对结果没影响;部分内容稍稍一变,对结果产生较大影响。我们要找的就是这种复杂的计算网络。)