STM-32:GPIO 输出-点亮LED-流水灯-蜂鸣器
目录
- 一、GPIO
-
- 1.1GPIO简介
- 1.2GPIO 硬件解析
-
- 1.2.1保护二极管
- 1.2.2 P-MOS、N-MOS 管
- 1.2.3数据输入输出寄存器
- 1.2.4复用功能输出
- 1.2.5模拟输入输出
- 1.3GPIO 的工作模式
-
- 1.3.1 输入模式 (模拟/浮空/上拉/下拉)
- 1.3.2 输出模式 (推挽/开漏)
- 1.3.3 复用功能 (推挽/开漏)
- 1.3.4 小结
- 二、GPIO 端口的配置
-
- 2.1 端口配置低寄存器(CRL)
- 2.2 端口配置高寄存器(CRH)
- 2.3 端口输入数据寄存器(IDR)
- 2.4 端口输出数据寄存器(ODR)
- 三、固件库函数
-
- 3.1什么是固件库函数
- 3.2为什么要学库函数
- 3.3库函数配置
- 四、点亮 LED 灯
-
- 4.1连接图示
- 4.2主函数
-
- 4.2.1点亮一个LED
- 4.2.2闪烁
- 五、LED流水灯
-
- 5.1接线图
- 5.2主函数
- 六、蜂鸣器
-
- 6.1接线图
- 6.2主函数
- 注意:一定要看
一、GPIO
1.1GPIO简介
GPIO 即 通用型输入输出端口(General-Purose Input / Output)的简称,简单来说就是 STM32 单片机的可控制的引脚,功能类似于 8051 系列单片机的 P0-P3 端口。STM32 芯片的 GPIO 引脚与外部设备连接起来,从而实现与外部的通讯、控制以及数据采集的功能。STM32 芯片的 GPIO 被分为很多组,每组 16 个引脚,所有的 GPIO 引脚都具有基本的输入输出功能。
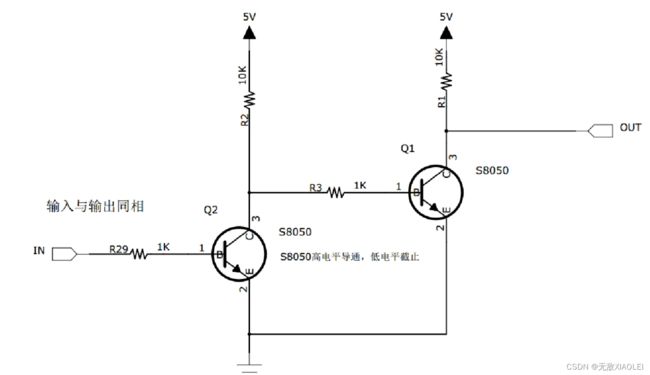
最基本的输出功能是由 STM32 控制引脚输出高、底电平,实现开关控制,例如把 GPIO 引脚接入到 LED 灯上,就可以用来控制 LED 灯的亮灭,引脚接入到继电器或者三极管,那就可以通过继电器或者三极管来控制外部大功率电路的推断,实现电气隔离。
最基本的输入功能是检测外部输入的电平,如把 GPIO 引脚连接到轻触按键上,通过引脚电平的高低来区分按键是否按下。
1.2GPIO 硬件解析
STM32 芯片 GPIO 接口内部原理如下:

1.2.1保护二极管
引脚上的两个保护二级管用于防止引脚外部过高或过低的电压输入,当引脚电压高于 VDD时,上方的二极管导通,当引脚电压低于 Vss 时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁。
1.2.2 P-MOS、N-MOS 管
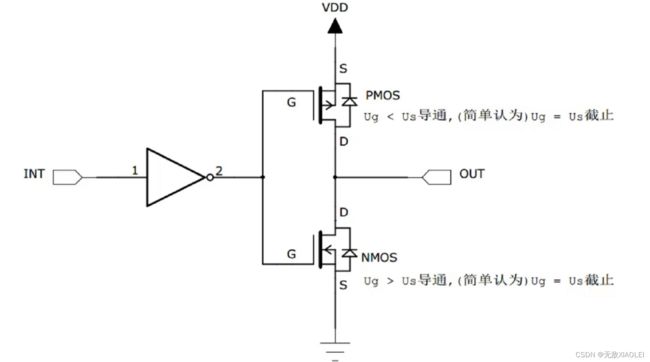
GPIO引脚线路经过两个保护二极管后,向上流向“输入模式”结构,向下流向“输出模式”结构。先看输出模式部分,线路经过一个由 P-MOS 和 N-MOS 管组成的单元电路。这个结构使 GPIO 具有了“推挽输出”和“开漏输出”两种模式。
所谓的推挽输出模式,是根据这两个 MOS 管的工作方式来命名的。在该结构中输人高电平时,经过反向后,上方的 P-MOS 导通,下方的 N-MOS 关闭,对外输出高电平,即“推”;而在该结构中输入低电平时,经过反向后, N-MOS 管导通,P-MOS 关闭,对外输出低电平,即“挽”。当引脚高低电平切换时,两个管子轮流导通,P 管负责灌电流,N管负责拉电流,使其负载能力和开关速度都比普通的方式有很大的提高。推挽输出的低电平为0伏,高电平为3.3伏。推挽模式的等效电路如下:
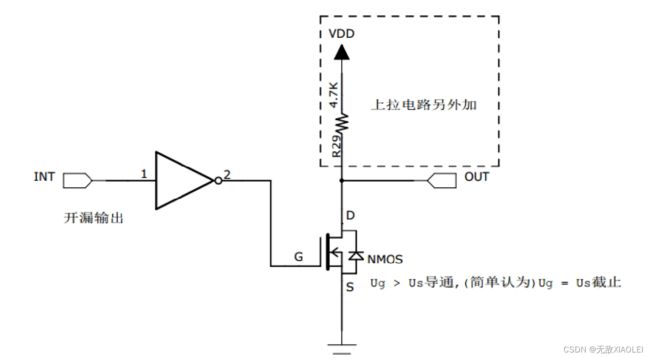
而在开漏输出模式时,上方的 P-MOS 管完全不工作。如果我们控制输出为 0(低电平)时,则 P-MOS 管关闭,N-MOS 管导通,使输出接地,若控制输出为 1(无法直接输出高电平)时,则 P-MOS 管、N-MOS 管都关闭,所以引脚既不输出高电平,也不输出低电平,为高阻态。为正常使用时必须外部接上拉电阻,参考下图。它具有“线与”的特性,也就是说,若有很多个开漏模式的引脚连接到一起时,只有当所有的引脚都输出高阻态,才由上拉电阻提供高电平,此高电平的电压为外部上拉电阻所接的电源电压。若其中一个引脚为低电平,那线路就相当于短路接地,使得整条线路都为低电平(0V)。
推挽输出模式一般应用在输出电平为 0V 和 3.3V 而且需要高速切换开关状态的场合。在使用 STM32 的过程中,除了必须使用开漏输出模式的场合,我们基本上都是使用推挽输出模式。
开漏输出我们一般应用于 I2C、SMBUS 通讯等需要“线与”功能的场合。除此之外,还应用于电路电压不匹配的场合,如需要输出 5V 的高电平,就可以在外部接一个上拉电阻,上拉电源为 5V ,并且把 GPIO 设置为开漏输出模式,当输出高阻态时,由上拉电阻和电源向外输出 5V 的电平,具体见下图:
1.2.3数据输入输出寄存器
前面提到的双 MOS 管结构电路的输入信号,是由 GPIO“输出数据寄存器 GPIOx_ODR”提供的,因此我们通过修改输出数据寄存器的值就可以修改 GPIO 引脚的输出电平。而“置位/复位寄存器GPIOx_BSRR”可以通过修改输出数据寄存器的值从而影响电路的输出。
看 GPIO 结构框图的上半部分,GPIO 引脚经过内部的上、下拉电阻,可以配置成上/下拉输入,然后再连接到施密特触发器,信号经过触发器后,模拟信号转化为 0、1 的数字信号,然后存储在“输入数据寄存器 GPIOx_IDR”中,通过读取该寄存器就可以了解 GPIO 引脚的电平状态。
1.2.4复用功能输出
“复用功能输出”中的“复用”是指 STM32 的其它片上外设对 GPIO 引脚进行控制,此时 GPIO 引脚用作该外设功能的一部分,算作第二用途。从其他外设引出来的“复位功能输出信号”与 GPIO 本身的数据寄存器都连接到双 MOS 管结构的输入中,通过梯形结构作为开关切换选择。
1.2.5模拟输入输出
当 GPIO 引脚用于 ADC 采集电压的输入通道时,用作“模拟输入”功能,此时信号是不经过施密特触发器的,因为经过施密特触发器后信号只有 0、1 两种状态,所以 ADC 外设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。类似地,当 GPIO 引脚用于 DAC 作为模拟电压输出通道时,此时作为“模拟输出”功能,DAC 的模拟信号输出就不经过双 MOS 管结构,模拟信号直接输出到引脚。
1.3GPIO 的工作模式
GPIO 的结构决定了 GPIO 可以配置成以下模式:
typedef enum
{
GPIO_Mode_AIN = 0x00, // 模拟输入
GPIO_Mode_IN_FLOATING = 0x04, // 浮空输入
GPIO_Mode_IPD = 0x28, // 下拉输入
GPIO_Mode_IPU = 0x48, // 上拉输入
GPIO_Mode_Out_OD = 0x14, // 开漏输出
GPIO_Mode_Out_PP = 0x10, // 推挽输出
GPIO_Mode_AF_OD = 0x1C, // 复用开漏输出
GPIO_Mode_AF_PP = 0x18 // 复用推挽输出
} GPIOMode_TypeDef;
1.3.1 输入模式 (模拟/浮空/上拉/下拉)
在输入模式时,施密特触发器打开,输出被禁止,可通过输入数据寄存器 GPIOx_IDR 读取 I/O 状态。其中输入模式,可设置为上拉、下拉、浮空和模拟输入四种。上拉和下拉输入很好理解,默认的电平由上拉或者下拉决定。浮空输入的电平是不确定的,完全由外部的输入决定,一般接按键的时候用的是这个模式。模拟输入则用于 ADC 采集。
1.3.2 输出模式 (推挽/开漏)
在输出模式中,推挽模式时双 MOS 管以轮流方式工作,输出数据寄存器 GPIOx_ODR 可控制 I/O输出高低电平。开漏模式时,只有 N-MOS 管工作,输出数据寄存器可控制 I/O 输出高阻态或低电平。输出速度可配置,有 2MHz、10MHz、50MHz 的选项。此处的输出速度即 I/O 支持的高低电平状态最高切换频率,支持的频率越高,功耗越大,如果功耗要求不严格,把速度设置成最大即可。在输出模式时施密特触发器是打开的,即输入可用,通过输入数据寄存器 GPIOx_IDR 可读取 I/O的实际状态。
1.3.3 复用功能 (推挽/开漏)
复用功能模式中,输出使能,输出速度可配置,可工作在开漏及推挽模式,但是输出信号源于其它外设,输出数据寄存器 GPIOx_ODR 无效;输入可用,通过输入数据寄存器可获取 I/O 实际状态,但一般直接用外设的寄存器来获取该数据信号。
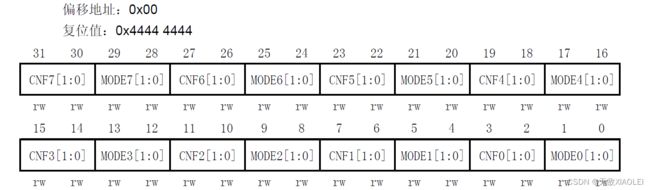
通过对 GPIO 寄存器写入不同的参数,就可以改变 GPIO 的工作模式,要了解具体寄存器时一定要查阅 《STM32F10X-中文参考手册》 中对应外设的寄存器说明。在 GPIO 外设中,控制端口高低控制寄存器 CRH 和 CRL 可以配置每个 GPIO 的工作模式和工作的速度,每 4 个位控制一个 IO,CRH 控制端口的高八位,CRL 控制端口的低 8 位,具体的看 CRH 和 CRL 的寄存器描述。
1.3.4 小结
每个 I/O 端口可以自由编程,但 I/O 端口寄存器必须按 32 位被访问。 STM32 的很多 I/O 端口都兼容 5V 的,这些 I/O 端口在与 5V 电压的外设连接时很有优势,具体哪些 I/O 端口是兼容 5V 的,可以从芯片的数据手册引脚描述章节查到。
STM32 的每个 I/O 端口都有 7 个寄存器来控制。常用的 I/O 端口寄存器只有 4 个,分别为 CRL、CRH、IDR、ODR。CRL 和 CRH 控制着每个 I/O 端口的模式及输出速率。STM32 的端口配置表如下图所示:


二、GPIO 端口的配置
2.1 端口配置低寄存器(CRL)
端口配置低寄存器(GPIOx_CRL)(x = A…E),如下图所示:
配置方法:

2.2 端口配置高寄存器(CRH)
端口配置高寄存器(GPIOx_CRH) (x=A…E),如下图所示:
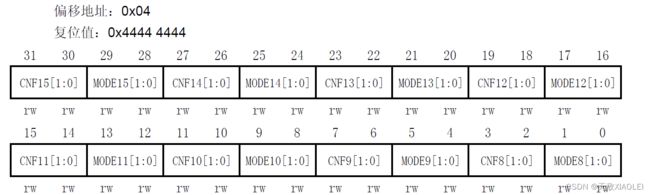
配置方法

2.3 端口输入数据寄存器(IDR)
端口输入数据寄存器(GPIOx_IDR) (x=A…E),如下图所示:
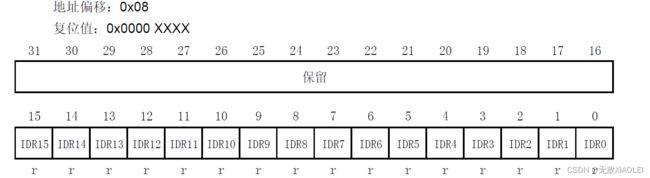
配置方法:

2.4 端口输出数据寄存器(ODR)
端口输出数据寄存器(GPIOx_ODR) (x=A…E),如下图所示:
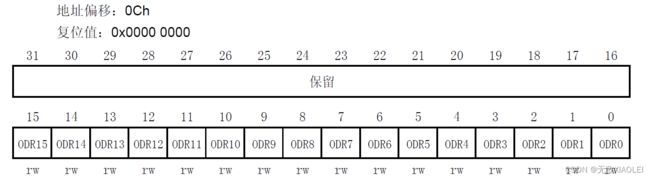
配置方法:

GPIOA -> ODR = 0x0000; // 灯灭
GPIOA -> ODR = 0xFFFF; // 灯亮
三、固件库函数
3.1什么是固件库函数
固件库是指“STM32 标准函数库”,它是由 ST 公司针对 STM32 提供的函数接口,即API (Application Program Interface),开发者可调用这些函数接口来配置 STM32 的寄存器,使开发人员得以脱离最底层的寄存器操作,有开发快速,易于阅读,维护成本低等优点。
当我们调用库 API 的时候不需要挖空心思去了解库底层的寄存器操作,就像当年我们刚开始学习 C 语言的时候,用 prinft() 函数时只是学习它的使用格式,并没有去研究它的源码实现,但需要深入研究的时候,经过千锤百炼的库源码就是最佳学习范例。
实际上,库是架设在寄存器与用户驱动层之间的代码,向下处理与寄存器直接相关的配置,向上为用户提供配置寄存器的接口。库开发方式与直接配置寄存器方式的区别见图:

3.2为什么要学库函数
在以前 8 位机时代的程序开发中,一般直接配置芯片的寄存器,控制芯片的工作方式,如中断,定时器等。配置的时候,常常要查阅寄存器表,看用到哪些配置位,为了配置某功能,该置 1 还是置 0。这些都是很琐碎的、机械的工作,因为 8 位机的软件相对来说较简单,而且资源很有限,所以可以直接配置寄存器的方式来开发。
对于 STM32,因为外设资源丰富,带来的必然是寄存器的数量和复杂度的增加,这时直接配置寄存器方式的缺陷就突显出来了:
开发速度慢
程序可读性差
维护复杂
这些缺陷直接影响了开发效率,程序维护成本,交流成本。库开发方式则正好弥补了这些缺陷。而坚持采用直接配置寄存器的方式开发的程序员,会列举以下原因:
具体参数更直观
程序运行占用资源少
相对于库开发的方式,直接配置寄存器方式生成的代码量的确会少一点,但因为 STM32 有充足的资源,权衡库的优势与不足,绝大部分时候,我们愿意牺牲一点 CPU 资源,选择库开发。一般只有在对代码运行时间要求极苛刻的地方,才用直接配置寄存器的方式代替,如频繁调用的中断服务函数。
对于库开发与直接配置寄存器的方式,就好比编程是用汇编好还是用 C 好一样。在 STM32F1 系列刚推出函数库时引起程序员的激烈争论,但是,随着 ST 库的完善与大家对库的了解,更多的程序员选择了库开发。现在 STM32F1 系列和 STM32F4 系列各有一套自己的函数库,但是它们大部分是兼容的,F1 和 F4 之间的程序移植,只需要小修改即可。而如果要移植用寄存器写的程序,那简直跟脱胎换骨差不多。
3.3库函数配置
请看江科大视屏进行配置
四、点亮 LED 灯
4.1连接图示
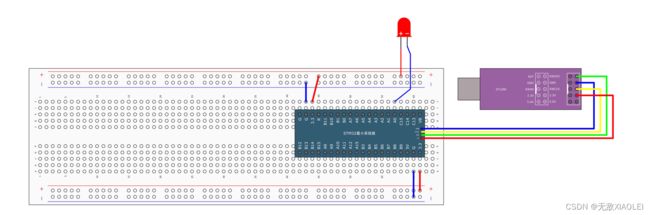
4.2主函数
4.2.1点亮一个LED
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
//点亮一个LED
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
// GPIO_ResetBits(GPIOA,GPIO_Pin_0);//点亮 把指定端口设置为高电平
// GPIO_SetBits(GPIOA,GPIO_Pin_0);//熄灭 把指定端口设置为低电平
// GPIO_WriteBit(GPIOA,GPIO_Pin_0, Bit_RESET);//点亮 根据第三个参数设置端口
GPIO_WriteBit(GPIOA,GPIO_Pin_0, Bit_SET);//熄灭
while(1)
{
}
}
4.2.2闪烁
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
while(1)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_0, Bit_RESET);//点亮 根据第三个参数设置端口
Delay_ms(500);
GPIO_WriteBit(GPIOA,GPIO_Pin_0, Bit_SET);//熄灭
Delay_ms(500);
}
}
五、LED流水灯
5.1接线图

5.2主函数
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_All;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
while(1)
{
GPIO_Write(GPIOA,~0x0001);//0000 0000 0000 0001
Delay_ms(100);
GPIO_Write(GPIOA,~0x0002);//0000 0000 0000 0010
Delay_ms(100);
GPIO_Write(GPIOA,~0x0004);//0000 0000 0000 0100
Delay_ms(100);
GPIO_Write(GPIOA,~0x0008);//0000 0000 0000 1000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0010);//0000 0000 0001 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0020);//0000 0000 0010 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0040);//0000 0000 0100 0000
Delay_ms(100);
GPIO_Write(GPIOA,~0x0080);//0000 0000 1000 0000
Delay_ms(100);
}
}
六、蜂鸣器
6.1接线图

6.2主函数
#include "stm32f10x.h" // Device header
#include "Delay.h" //延时函数
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Delay_ms(500);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
Delay_ms(500);
}
}
注意:一定要看
千万不要直接复制代码,因为是采用库函数编写,大家一定要自己动手,跟着视频学!!!!!