面试题:Linux是如何避免内存碎片的
Linux是如何避免内存碎片的?
在网上看到这个面试题,参考答案是这样的:
- 伙伴算法,用于管理物理内存,避免内存碎片;
- 高速缓存Slab层用于管理内核分配内存,避免碎片。
故继而去深入了解了一波,做了一个粗略的整理:
内存碎片问题
频繁地请求和释放不同大小的内存,必然导致内存碎片问题的产生,结果就是当再次要求分配连续的内存时,即使整体内存是足够的,也无法满足连续内存的需求。该问题也称之为外碎片(external fragmentation)。
解决方案:
避免外碎片的方法有两种:
1、利用分页单元把一组非连续的空闲页框映射到连续的线性地址
2、开发一种适当的技术来记录现存的空闲的连续页框块的情况,以尽量避免为满足对小块的请求而分割大的空闲快
第一种方案的意思是,我们使用地址转换技术,把非连续的物理地址转换成连续的线性地址。
第二种方案的意思是,开发一种特有的分配技术来记录下来空闲内存的情况,从而解决内存碎片问题。
Linux采用了第二种方案,因为在某些情况下,系统的确需要连续的物理地址(DMA处理器可以直接访问总线)。
这里先对Linux内存管理做一个简单介绍
linux kernel 通过把整个物理内存划分成以一个个page进行管理,管理器就是伙伴系统,它的最小分配单元就是page。但是对于小于page的内存分配,如果直接分配一个page,是一个很大的浪费。linux kernel 通过slab来实现对小于page大小的内存分配。slab把page按2的m次幂进行划分一个个字节块,当kmalloc申请内存时,通过slab管理器返回需要满足申请大小的最小空闲内存块。
slub主要是针对slab的对象管理数据的优化版本,相比于slab,slub提供更小的管理成本开销。而且slub对多核系统的支持也更加友好。细节这里就不展开讲。
所以kernel的内存管理是个2层分层系统,从下往上依次为:
第一层为全部物理内存:其管理器为伙伴系统,最小管理单位为page;
第二层为slab page:其管理器为slab/slub,最小管理单位为2的m次幂的字节块;
伙伴系统(buddy system)
Linux采用著名的伙伴系统(buddy system)算法来解决外碎片问题。把所有的空闲页框分组为11个块链表,每个链表分别包含大小为1,2,4,8,16,32,64,128,256,512,1024个连续的页框,对1024个页框的最大请求对应着4MB大小的连续RAM(每页大小为4KB),每个块的第一个页框的物理地址是该块大小的整数倍,例如,大小为16个页框的块,其起始地址是16*2^12的倍数。
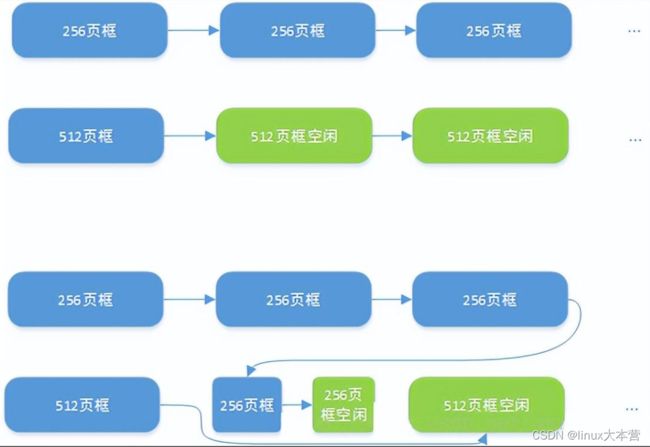
我们通过一个例子来说明伙伴算法的工作原理,假设现在要请求一个256个页框的块(1MB),算法步骤如下:
• 在256个页框的链表中检查是否有一个空闲快,如果没有,查找下一个更大的块,如果有,请求满足。
• 在512个页框的链表中检查是否有一个空闲块,如果有,把512个页框的空闲块分为两份,第一份用于满足请求,第二份链接到256个页框的链表中。如果没有空闲块,继续寻找下一个更大的块。
下图比较形象地描述了该过程。
页的请求
以上过程的逆过程,就是页框块的释放过程,也是该算法名字的由来,内核试图把大小为B的一对空闲伙伴块合并为一个2B的单独块,满足以下条件的两个块称之为伙伴:
• 两个块具有相同的大小
• 他们的物理地址是连续的
第一块的第一个页框的物理地址是2 * B * 2^12
该算法是递归的,如果它成功合并了B,就会试图去合并2B,以再次试图形成更大的块。
相关视频推荐
90分钟了解Linux内存架构,numa的优势,slab的实现,vmalloc的原理
[linux]内存原来还有这么多事儿,3个版本迭代说清楚内存的故事
学习地址:C/C++Linux服务器开发/后台架构师
需要C/C++ Linux服务器架构师学习资料加qun812855908获取(资料包括C/C++,Linux,golang技术,Nginx,ZeroMQ,MySQL,Redis,fastdfs,MongoDB,ZK,流媒体,CDN,P2P,K8S,Docker,TCP/IP,协程,DPDK,ffmpeg等),免费分享

高速缓存Slab层
slab是Linux操作系统的一种内存分配机制。其工作是针对一些经常分配并释放的对象,如进程描述符等,这些对象的大小一般比较小,如果直接采用伙伴系统来进行分配和释放,不仅会造成大量的内存碎片,而且处理速度也太慢。
而slab分配器是基于对象进行管理的,相同类型的对象归为一类(如进程描述符就是一类),每当要申请这样一个对象,slab分配器就从一个slab列表中分配一个这样大小的单元出去,而当要释放时,将其重新保存在该列表中,而不是直接返回给伙伴系统,从而避免这些内碎片。slab分配器并不丢弃已分配的对象,而是释放并把它们保存在内存中。当以后又要请求新的对象时,就可以从内存直接获取而不用重复初始化。
对象高速缓存的组织如右下图所示,高速缓存的内存区被划分为多个slab,每个slab由一个或多个连续的页框组成,这些页框中既包含已分配的对象,也包含空闲的对象。
在cache和object中加入slab分配器,是在时间和空间上的折中方案。

另外为了解决多核和NUMA架构下效率问题,slab管理器kmem_cache又把slab page对象分为2层结构,从下往上依次为:
第一层为NUMA node下cpu共享page:管理器为kmem_cache_node,管理node下的slab对象,解决NUMA架构的内存访问效率问题。当本层的空闲page不足时,从伙伴系统申请空闲page;
第二层为per-cpu专属page:管理器为kmem_cache_cpu,管理cpu专属的slab对象,解决多核竞争问题。当本层的空闲page不足时,从第一层申请空闲page;

slab分配算法
slab分配算法采用cache 存储内核对象。当创建cache 时,起初包括若干标记为空闲的对象。对象的数量与slab的大小有关。开始,所有对象都标记为空闲。当需要内核数据结构的对象时,可以直接从cache 上直接获取,并将对象初始化为使用。
下面考虑内核如何将slab分配给表示进程描述符的对象。在Linux系统中,进程描述符的类型是struct task_struct ,其大小约为1.7KB。当Linux 内核创建新任务时,它会从cache 中获得struct task_struct 对象所需要的内存。Cache 上会有已分配好的并标记为空闲的struct task_struct 对象来满足请求。
Linux 的slab 可有三种状态:
满的:slab 中的所有对象被标记为使用。
空的:slab 中的所有对象被标记为空闲。
部分:slab 中的对象有的被标记为使用,有的被标记为空闲。
slab 分配器首先从部分空闲的slab 进行分配。如没有,则从空的slab 进行分配。如没有,则从物理连续页上分配新的slab,并把它赋给一个cache ,然后再从新slab 分配空间。