综述:智能城市的车联网部署:应用、架构和挑战
Deployment of IoV for Smart Cities: Applications, Architecture, and Challenges
- 导论:车联网与智慧城市概述
- 车联网应用
-
- ITS-BASED IoV应用程序
- 智能城市相关的车联网应用
- 车联网架构和车间交互模型
-
- 分层的IoV架构
- 车联网交互通信模型
- 车联网车内交互通信模型
-
- 车辆-传感器(V2S)交互模型
- 车辆与驾驶员(V2D)交互模型
- 设备到设备(D2D)交互模型
- 车联网车辆间交互通信模型
-
- 车辆到车辆交互模型(V2V)
- 车到人的交互模型(V2P)
- 车辆-路边设施(V2R)交互模型
- 车辆到基础设施(V2I)交互模型
- 车辆-障碍物(V2B)交互模型
- 车辆到住宅(V2H)交互模型
- 车辆到电网(V2G)的交互模型
- 车辆-万物(V2X)交互模型
- 面向大数据的UIoV新架构
-
- 识别层
- 物理层
- 内部设备层
-
- 内部设备子层
- 设备间子层
- 通信层
- 云服务层
- 多媒体和大数据计算层
-
- 数据预处理子层
- 大数据计算子层
- 智能交通子层
- 应用层
- 多媒体和大数据计算
-
- 数据预处理子层的基本功能单元
- 大数据计算子层的基本功能单元
-
- 分而治之计算功能单元
- 数据融合决策功能单元
- 智能交通子层的基本功能单元
- 车联网的既存挑战(问题)
-
- 技术挑战
- 社会挑战
- 全文总结
| 摘要 |
|---|
| 车联网(IoV)是移动互联网和物联网(IoT)的融合,车辆是传感网络中移动的智能节点或智能对象。本文对车联网技术的研究现状作了两方面的贡献。首先,我们对当前和新兴的车联网模式和通信模式进行了全面回顾,重点介绍了在智慧城市的部署。目前,许多作者的调查都集中在车联网上,认为车联网只服务于驾驶安全、交通效率和信息娱乐等智能交通应用。本文更全面地介绍了车联网服务于智慧城市对大规模数据感知、收集、信息处理和存储的需求。论文的第二部分提出了一种新的通用的车联网架构,可用于智能城市的不同通信模式,以解决上述挑战。主要包括车辆识别层、对象层、设备内部层、通信层、服务器与云服务层、大数据与多媒体计算层、应用层等七大层。本文的最后一部分讨论了各种挑战,并给出了一些实验结果和对未来研究方向的见解,如在智慧城市场景中,大量且不断增长的车辆数量的影响和动态网络结构中的数据包发送成功率。 |
导论:车联网与智慧城市概述
近年来,大规模网络传感器、计算和通信技术以及云基础设施的快速发展,使智慧城市在不久的将来得以实现。在智能城市场景中,许多物理对象,或者更准确地说,智能对象具有自己的处理器、计算和通信能力,可以相互交互。这些智能对象将通过增加互联和互操作性提供一个安全、智能的环境,也被称为物联网(IoT)。在物联网的目标中,许多这样的对象将是连接在一起的车辆或汽车,它们可以与各种类型的连接到互联网的设备、车内设备或车外设备进行无线通信和交互。这就产生了一种特定类型、定制化的物联网,称为车联网(IoV),实现了智能交通等智能城市应用的统一管理。
智慧城市的概念是作为一种战略出现的,以缓解快速和持续的城市化的挑战,同时为其公民提供更好的生活质量。智能城市的特点是数字技术的广泛应用和各种形式的交互(如人对人、人对机器、机器对机器),产生大量的数据,通常被称为大数据。
车联网可以看作是移动互联网与传统物联网的融合。车联网技术是指利用V2V(车对车)、V2R(车对路)、V2I(车对基础设施)、V2B(车对建筑)、V2H(车对家)、V2X(车对一切)、V2G(车辆到电网)和V2H(车辆到家庭)交互。它还允许V2D(车辆到设备)、V2S(车辆到传感器)和D2D(设备到设备)之间的信息交换。在智慧城市部署车联网,实现车辆、道路、基础设施、建筑及周边环境的信息共享和大数据信息采集。车联网生态系统可以为智能交通应用提供引导和监管车辆的服务,并提供丰富的多媒体和移动互联网应用服务。
目前,许多作者对车联网的调查主要集中在车联网服务于智能交通系统(ITS)的应用,如驾驶员安全、交通效率和信息娱乐等方面。据我们所知,车联网服务于智慧城市大规模数据感知、收集、信息处理和存储需求的潜力和用途尚未得到全面的调查和调查。智能城市环境中的一个重要问题是,如何收集或向集成在智能对象(如垃圾桶、排水系统和建筑基础设施)中的数十万个传感器和执行器提供数据。Shah等人提出使用车辆作为数据MULEs(移动泛在局域网扩展),在智慧城市环境中有机会地收集和分发数据。车联网在智慧城市的应用还包括环境监测(如空气污染)、垃圾管理,以及监测敏感区域和识别可疑行为的城市监测。在这种车联网场景中,可以利用位于车辆对象上的摄像机来执行监视任务。这也引入了车联网处理图像和视频等多媒体数据的需求。本文旨在填补这一研究空白,并对车联网进行了更具包容性的回顾,以满足智慧城市对大规模数据感知、收集、信息处理和存储的需求。最后需要指出的是,虽然重点是利用陆基车辆作为车联网的智能移动智能节点,但讨论也可以应用于空基车辆和水基车辆的使用
在智能城市中部署车联网的主要挑战之一是在车联网生态系统中整合所有组件和对象通信。为了满足这些要求,一些作者提出了基于分层设计的车联网体系结构[20][24]。但如上所述,这些设计都是为满足ITS应用需求而量身定制的,没有考虑到智慧城市环境和大数据处理的一般场景。第二个挑战是与车联网的车辆和其他对象数量的快速增长,以及车辆与应用平台之间的大规模数据收集。这一挑战符合大数据在规模、体积和维度上的异质性。这导致了对大数据处理和分析的需求,旨在为研究和商业利益得出有意义的见解。值得注意的是,目前许多提出的车联网架构没有或没有充分考虑到大数据的收集、处理和分析。[19]近期的工作主要集中在车联网大数据采集的安全机制上。此外,来自车内对象以及车辆与应用平台之间的多媒体内容的不断增长,也导致了文本、音频、图像、视频等多媒体数据的巨大容量。因此,迫切需要一种能够解决上述挑战的新型通用车联网架构。

本文提出了一种适用于不同通信模式的车联网通用架构,以满足智慧城市的需求。我们首先全面回顾了现有的车联网架构和不同的通信模型在智慧城市部署的研究工作。随后,通过对物联网概念的思考,从车联网的视角出发,提出了一种全新的模式,即通用型车联网(UIoV),将其作为智能城市不同通信模式的通用架构。此外,大数据处理和分析被认为是智能的异构多媒体事物,可以相互交互和合作,并与其他连接到互联网的事物,以促进基于多媒体的服务和应用,全球用户都可以使用。图1给出了所提出的UIoV的概述。UIoV体系结构包括车辆识别层、对象层、设备间层、通信层、服务器与云服务层、大数据与多媒体计算层、应用层等7个层次。该体系结构中的特定层或子层考虑了标量和多媒体对象、车辆内设备、车辆和平台间设备、大数据、多媒体数据等。大数据计算层具有用于大多媒体处理和分析的功能单元。
在智慧城市中部署车联网汽车有几个(技术和社会)挑战需要解决。当智慧城市中与车联网的车辆数量不断增加时,表示大数据采集前车辆节点(移动节点)数量不断增加。这将导致数据包成功发送到汇聚节点的一些影响。车辆节点的速度也是数据包传输速率的一个因素。车联网的动态网络结构进一步增加了报文发送成功率的复杂性。现有的物联网工作没有考虑到这一点,因此无法直接应用于大数据采集的车联网。本文的另一个贡献是研究未来的挑战,以及上述因素对智能城市场景中移动节点的影响。给出了一些实验结果,为今后的研究方向提供了思路和信息。
本文的其余部分组织如下。第二部分给出了车联网研究的背景资料和分类。第三部分从两个方面讨论了在车联网中的应用:(1)智能交通的应用;(2)智慧城市相关应用。第四节提出车联网层结构和交互通信模型的研究综述。第五章提出了一种用于智慧城市部署的新型通用车联网(UIoV)体系结构,第六章进一步讨论了UIoV体系结构中的大数据和多媒体计算层。第七节讨论了在智慧城市部署车联网所面临的一些技术和社会挑战。本部分还给出了智能城市车联网的一些实验结果,为未来的研究提供了启示。最后,第八节给出了一些结束语。
车联网应用
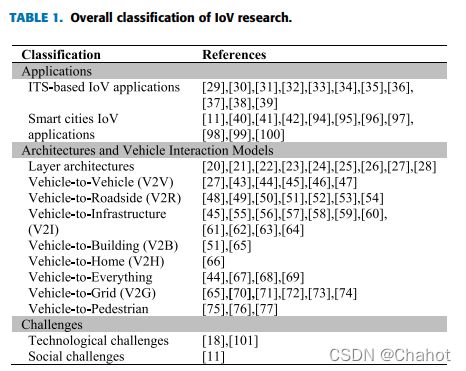
本节从两个方面讨论车联网的应用:(1)智能交通(ITS)的应用;(2)智能城市相关应用的车联网。采用这两种观点的理由是,许多作者的调查都将注意力集中在车联网上,认为它只服务于智能交通系统的应用,如司机安全、交通效率和信息娱乐。车联网服务于智慧城市的大规模数据感知、收集、信息处理和存储需求的潜力和用途尚未得到全面的调查和调查。基于信息技术的车联网应用主要满足车辆个体和车联网本身的需求。另一方面,对于车联网智慧城市的应用,见表1。车联网研究的总体分类。车联网中的车辆对象服务于智能城市中成千上万个对象的数据采集、信息传输、处理和存储的机会需求。表2总结了智能交通和智慧城市车联网应用的两个视角,以及不同的类别和分类,并给出了工作实例

ITS-BASED IoV应用程序
车联网在智能交通领域的应用大致可分为四大类:(1)基于安全的;(2)高效率的;(3)舒适得;(4)资讯/娱乐类应用。基于安全的车联网应用的主要目标是通过检测交通系统中潜在的碰撞情况来避免或减少事故数量。这些被称为避碰系统(CAS)或合作系统车内CAS信息分发到相邻车辆时的避碰系统。Hafner et al.[29]提出了一种基于V2V的交叉口协同避碰方法。利用形式化控制理论方法,提出了交叉口两车协同避碰的分散算法,以保证系统无碰撞。他们的工作在两辆装有仪器的车辆上进行了验证,这两辆车在交叉路口进行了避碰场景的测试。Taleb et al.[30]的另一项工作提出了一种车辆网络中有效避免碰撞的策略,称为C-RACCA系统。C-RACCA使用与车辆移动有关的一些特征,将属于同一组的车辆组成集群,并与表示遇到潜在碰撞场景的风险的车辆关联一个紧急级别。其他CAS应用程序的示例可以在[31]和[32]中找到。
基于效率的应用旨在提高车联网中车辆对象的移动性。一个示例应用是基于交通量的交叉口交通信号调度,以减少等待时间。[33]的工作提出了一种基于v2v的方法,通过对接近交叉口的车辆进行聚类。计算集群内车辆的密度,并将信息发送到交通信号控制系统以设置定时周期。[34]的另一项工作提出了一种以交通效率和公平性最大化为目标的模糊逻辑交叉口调度方法。他们的方法分为两个阶段。在第一阶段,开发了一个绿色阶段选择器来选择后续的绿色阶段。在第二阶段,提出了一个绿灯时间调节器来确定所选阶段的绿灯时间。[35]的工作提出了一种利用V2X通信的模糊流量控制方法。高效率的应用程序的另一个例子可以在[36]提出的合作推动车辆提前建模轨迹附近的交通信号减少停止频率和旅行时间和提高吞吐量的道路交通状况和形势对相邻车辆。
基于舒适的车联网应用程序旨在为司机提供信息,使旅行舒适和愉快。这可能包括天气、路线导航、停车场信息[92]、旅游信息服务站的位置、餐馆、加油站等。以资讯/娱乐为基础的应用程序旨在向司机和乘客提供与娱乐有关的资讯。这将包括访问互联网和其他文件共享服务。目前,由于车联网中车辆对象的动态和变化特性,使车辆能够接入全球互联网并保持信息的更新是一项具有挑战性的任务。Ksentini等人提出了一种VANET到Internet协议,用于车载网络的qos接入。他们的方法使用了基于预测的路由(PBR)算法和IEEE 802.11p EDCA方案。Zhu等人提出了一种车载网络上的视频流上传服务。作者利用V2I和V2V通信将移动车辆的视频流协同转发到固定网络中。Razzaq和Mehaoua[39]的另一项工作提出了一种使用网络编码的车载网络流方案。在这种方法中,传输路径上的节点可以通过对接收到的数据包进行编码来恢复丢失的数据包。
智能城市相关的车联网应用
车联网可以作为一种经济有效的替代方案,满足智慧城市对智慧城市环境中智能对象的大规模数据采集、运输和处理的需求。与传统的无线传感器网络(WSNs)相比,车联网中的车辆节点不受电池电量有限的资源约束和信息处理的限制。在车联网中,车辆是传感网络中的移动智能节点或对象。在智慧城市环境中,每个车辆对象可以扮演四个角色:(1)车辆对象作为节点和对等体,建立和维护车联网内的网络连通性;(2)车载对象作为客户端,消费车联网和车联网提供的服务;(3)车辆对象作为数据收集器或数据骡子,从其他智能对象收集并传输数据到智慧城市内的数据中心;(4)车辆对象作为分布式计算资源,补充(较小)智能对象内的受限信息处理资源。目前,许多作者的调查只关注了(1)和(2)的作用。本节讨论了(3)和(4)在智慧城市的车联网应用中的扩展作用。
Bonola等人[40]的工作描述了从罗马城的传感器中收集大规模数据的实验评估。在他们的工作中,320辆出租车被部署为移动节点,作为不知情的数据实验对象,根据它们的日常活动(即路径中的移动车辆对象不是专门为数据收集角色而设计的)。作者表明,120辆汽车组成的网络可以在不到24小时内实现罗马市区80%的数据采集覆盖。Khan et al.[41]的另一项工作提出了一个案例研究,通过车辆延迟容忍网络从传感器收集波尔图市的大规模数据。作者的方法可以适应智能城市中不同类型的传感器,包括视频传感器(摄像机)、噪音传感器、气体传感器和气象传感器。在数据采集过程中,车辆车载单元(on -board Units, OBUs)作为数据骡子,将信息数据从传感器传输到路侧单元(Road-side Units, rsu)。车联网由市政车辆、公交车、出租车和静态rsu组成。作者提出了一种数据转发算法用于数据收集,该算法依赖于OBUs的提议秩和数据包的跳数。作者表明,他们的方法可以通过限制数据包的跳数,以及选择更频繁访问RSU的OBUs来增加发送数据包的数量,并减少网络开销。Xu等人的另一项工作[42]提出了一种基于车辆自组网的延迟和覆盖优化数据采集(LCODC)方案,适用于北京市。他们提出的LCODC方法由三个部分组成:(1)移动车辆;(2)数据包;(3)数据中心。当车辆进入一个新的区域时,部署在移动车辆上的传感器将收集相关数据。采用车辆间V2V传输,提高数据采集效率。一辆移动车辆可以存储的数据包数量是有限的。流动车辆将丢弃LCODC方案中不太重要的数据包。数据中心是智能城市中的固定设备,是数据包传输的目的地。作者利用移动车辆的历史轨迹来找出智能城市中的模式,并表明他们的方法可以在保证可接受的覆盖率的同时减少延迟。
Hu等[95]的工作提出了一种通过部署车辆传感器网络(VSN)进行微气候监测来测量城市地区空气质量的方法。他们的方法利用车辆的机动性,在不同的地点进行测量。Wang和Chen[11]的另一项工作提出了一种利用VSNs进行数据采集和估算的高效空气质量监测方案。在他们的方法中,一组装有汽油传感器、GPS接收器和无线接口(如Wi-Fi、LTE-A)的汽车在城市中漫游,并定期向远程服务器报告传感数据和位置。作者表明,他们的方法(称为EDGE)的实验结果减少了79 92%的传感报告和节省44 81%的货币成本。作者还发现了一个重要的社会考虑因素,即根据司机的报告给予金钱奖励。作者将设计奖励政策的问题留给了未来的研究。Sivaraman等人[96]提出了悉尼城市空气污染监测的HazeWatch项目,该项目使用附着在车辆上的低成本移动传感器单元来测量空气污染物。智能城市车联网应用的其他例子包括结构和道路监测、医疗保健服务和安全。[97]的研究提出了一种监测哈佛桥健康状况的方法,该方法使用无处不在的智能手机,在日常通勤期间从车辆内部收集桥梁振动数据。作者表示,每周和周末分别有1.8万和1.4万次智能手机通过该桥,可以获取结构健康监测的有用数据。[98]和[99]提出利用车辆作为移动传感器来监测道路状况。Yi等人[98]开发了一种智能手机探测车(SPC),用于检测和评估路面坑洼和颠簸等异常情况。每个SPC都是一辆装有智能手机的车辆,智能手机可以向云服务器报告碰撞事件。Mednis等人[99]开发了CarMote,这是一种车载嵌入式设备,利用麦克风和加速度计传感器监测路面。[94]的工作研究了使用船只作为远程医疗基础设施骡的可行性,从孤立的亚马逊地区收集医疗超声数据,并将其运输到巴西的主要城市。Lee等人[100]提出了MobEyes系统,该系统利用车载传感器网络上的摄像头进行主动城市监测和取证数据管理。作者进一步指出,他们的方法可以广泛应用于智能城市的应用(例如环境污染、道路状况和交通拥堵监测)。
车联网架构和车间交互模型
本节回顾了一些关于车联网层架构和交互通信模型的工作,给出了背景信息和最近的研究工作。
分层的IoV架构
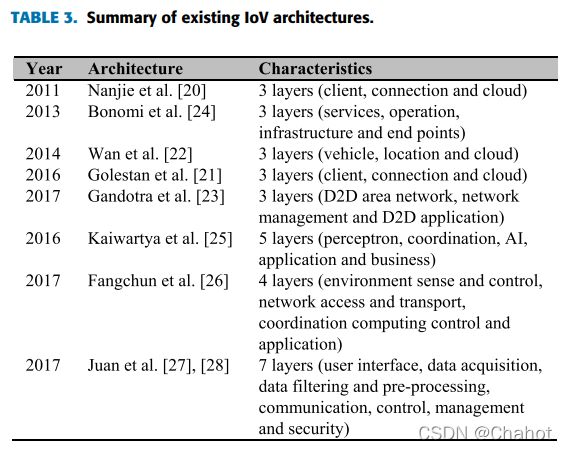
一些作者提出了IoV[20][28]的层结构。表3显示了被提议的架构的总结、被提议的年份以及它们的特点。Nanjie[20]和Golestan等人[21]都提出了三层车车载结构。在Nanjie的架构中,三层分别是客户端、连接层和云层。在连接层中,车辆内外的所有传感器负责收集车辆速度和位置、油压、胎压、前方障碍、路况等所有环境信息,并检测驾驶模式、车辆状况等特定的感兴趣事件。连接层保证了网络的无缝连接和互操作性,支持V2V、V2R、V2P和V2I的通信模型。所有的信息都被发送到下一个云层。这一层为基于云的过程提供对移动汽车的互联网访问。车联网需要并包含统计它提供所需的计算资源或计算能力、数据存储和处理基础设施工具。它负责储存、处理、分析和决策。
Golestan et al.[21]提出了车联网的架构。作者主要研究了联网汽车的态势感知和协同态势感知中的道路安全框架。Wan等人[22]也提出了三层架构,但与上述两种架构略有不同。他们的工作重点是基于云支持的环境感知车辆网络物理系统。他们的架构由车辆、位置计算和云层组成。第一层主要是车辆内部传感器的数据采集。利用短程无线技术获取车内乘员的血压、心率、情绪行为等环境和生理数据。在位置计算层,部署在重要位置的路边设备(RSE)可以与安装在过往车辆上的车载设备(OBE)交换信息。RSE和周围的OBE相互连接,共享上下文感知的交通信息和娱乐资源。这种架构允许与附近的汽车交换信息。在车辆超出范围的情况下,在rsu等路边通信基础设施的支持下,通过多跳通信实现信息交换。第三层是云层,它托管服务,提供对历史流量信息的访问。它还支持跨多个互联的云系统进行负载均衡。
Gandotra等人的工作也提出了D2D通信的三层架构。他们的架构与上述三家大不相同。它由D2D网络层、网络管理层和D2D应用层组成。第一层代表网络区域,在该区域中,设备或直接相互连接,或通过网关连接,由网络管理部门选择通信类型。第二层支持IP连接和漫游。第三层包含应用程序的服务(如智能家居)。2013年,思科的Bonomi[24]提出了车联网的四层架构,由服务层、基础设施层、运营层和终点层组成。终端层包括车辆、软件和通过802.11p协议实现的V2V通信。基础设施层定义了允许车联网中所有参与者之间连接的技术。操作层监视策略实施和基于流的管理,以确保遵守所有适用的策略,以规范信息管理和流。最后,第四层是云层。它指定了不同类型的云(如公共云、私有云和企业云)基于定义的配置文件以及按需接收服务的可能性提供的服务。这种车联网架构允许车辆和司机连接到互联网,从而使他们能够访问广泛的服务提供商,并促进商业业务服务与车辆的集成。
Kaiwartya等人介绍了一个由感知、协调、人工智能(AI)、应用和业务层组成的五层架构。第一层由不同类型的传感器和执行器组成,集成到车辆、rsu、智能手机和其他个人设备中。这一层的主要职责是收集车辆、交通环境和连接设备的各种元素的信息。协调层由虚拟通用网络协调模块表示,适用于Wi-Fi、4G/LTE、WAVE等异构网络。它确保了来自下层的信息的传输,这些信息需要在下一个人工智能层处理。该层的主要任务是处理从异构网络接收到的不同结构的信息。然后,这些信息被重新组合成一个统一的结构,可以在每个候选网络中识别和处理。人工智能层也由云基础设施代表。这一层负责存储、处理和分析来自较低层的信息,然后做出选择最佳应用程序的决策。第四层是应用层,代表智能应用,如交通安全、基于网络的公用事业应用等。这一层的目标是为最终用户提供智能服务,这些服务基于前一层处理的信息的智能和批判性分析。最后一层是业务层,它应用统计分析来交付策略,包括图表、流程图、表格和比较,以开发业务模型。该体系结构模型考虑了车内异构网络的概念。
最近,Yang et al.[26]在2017年提出了一个四层车联网架构。他们的建筑与过去的建筑不同。第一层为车辆网络环境传感与控制层。环境感知是车联网服务的识别基础,包括自动驾驶汽车服务、智能交通服务、车辆信息服务等。车辆和交通环境对象的控制是车联网服务实施的基础。第二层是网络访问和传输层,其主要功能是实现网络访问、数据传输协调计算控制层。该层为车联网应用提供了对人车环境进行协调计算和控制的能力,如数据处理、资源分配和群体智能计算。最后一层为应用层,提供服务,实现人-车-环境协调服务的要求。
另一组研究人员[27]、[28]提出了一种七层车联网模型结构。他们的架构允许在车联网环境中所有网络组件的透明互连和数据传播。第一层是用户交互层,通过管理界面与驱动程序进行直接交互,以协调所有驱动程序通知。根据当前环境选择最佳的显示元素,辅助和减少驾驶员分心。数据采集层旨在从不同的来源收集数据。其中包括车内传感器、全球定位系统(GPS)、交通灯、道路信号等。第三层是数据过滤和预处理层。在这一层中,对采集到的数据进行预处理,消除无关信息进行传输,减少网络流量。传输的标准基于为已订阅或活动服务的车辆创建的服务概要。通信层的目的是选择最合适的网络来发送信息。选择参数,如不同可用网络的拥塞和QoS级别、信息相关性、隐私性和安全性等,都被考虑在内。第五层是控制和管理层。这一层对车联网环境中的不同网络服务提供商进行全局协调和管理。应用不同的功能和策略,如流量管理、流量工程、报文检测等来管理接收到的信息。第6层是业务层,用于处理海量信息。它涉及云计算基础设施。这一层还包括存储、处理和分析从较低层接收到的信息的功能。决策建立在数据统计分析的基础上。根据应用程序中的数据使用情况和统计分析,确定了协助应用业务模型的策略。安全层是一个横向层,它跨越其他层进行直接通信。在车联网架构中可以找到安全功能(如数据认证、完整性、不可否认性和机密性、访问控制、可用性等),以支持解决各种类型的安全攻击的缓解方案。
车联网交互通信模型
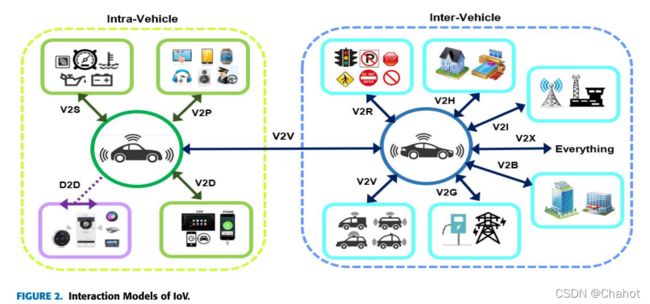
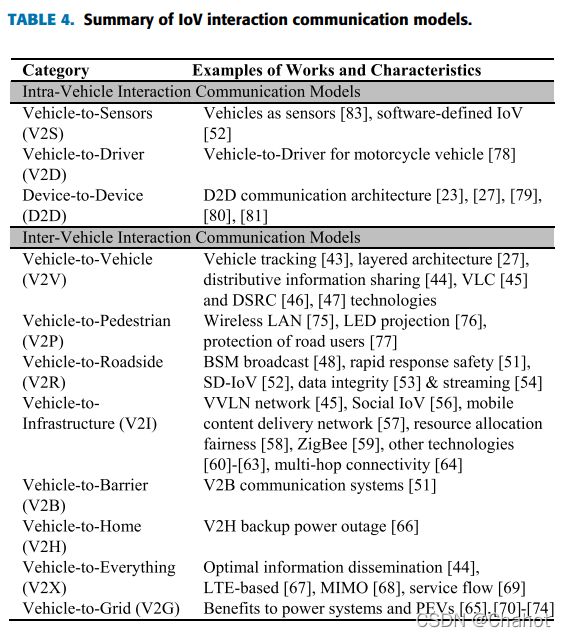
车联网生态系统中的交互通信模型可分为两类:(1)车内交互模型;(2)车间交互模型。图2为各种车内和车间交互模型的示意图。几位作者对车联网的车辆交互通信模型进行了综述和研究。为了完整起见,本节讨论了各种交互模型的一些研究工作和挑战。表4是不同车联网交互通信模型的总结。
车联网车内交互通信模型
车内交互模型在车内进行通信。本节概述了车辆内通信模型的研究现状。特别是,我们对车辆到传感器(V2S)、车辆到驾驶员(V2D)和设备到设备(D2D)模型的研究工作进行了分类和描述。载具内相互作用模型总结如表4所示。
车辆-传感器(V2S)交互模型
车联网的实现需要传感器、执行器等设备使用不同的技术与其他设备和基础设施进行通信。这种设备交互面临几个设计挑战,如设备之间的不兼容性、互联网连接问题、有限的处理和存储能力。为了解决这些问题,作者提出了一个全面的框架,该框架支持分层设计体系结构,能够为通信提供无缝集成。谢等。[83]讨论了一个新时代的IoV车辆配备不同的传感器和传感器节点本身,并提出这样的车辆将需要一个数据采集系统(DAS),那里的车辆数据传输在网络可以通过OBD2(以广泛的诊断)接口。目的是通过实时获取车辆数据,保证车辆的安全运行,改善驾驶体验,实现在线诊断。Chen et al.[52]表示,新型车联网带来了为车辆配备多功能传感器和通信模块的趋势,为司机和乘客带来了便利,并带来了各种创新的智能交通应用。然而,他们指出,车联网面临许多实现挑战,如灵活高效的连接、服务质量保证和多个并发支持请求。为此,作者提出了一种面向服务的软件定义车联网动态连接管理(SD-IoV),通过采用软件定义的网络框架,能够解决上述问题。
车辆与驾驶员(V2D)交互模型
Spelta等人[78]提出了一种交互系统的定义和实现,该系统用于摩托车车辆的车对驾驶员和车对环境通信,该系统基于智能手机核心和无线蓝牙介质。这辆摩托车装有嵌入式嵌入式系统
CAN -蓝牙转换器,与智能手机接口,作为通向音频头盔和网络服务器的网关。
设备到设备(D2D)交互模型
Contreras-Castillo等人提出了一个七层架构,包括一个D2D交互模型,支持车联网生态系统中所有设备之间的功能、交互、表示和信息交换。Rose等人[79]将D2D通信作为一种通信模型来讨论,该通信模型表示两个或多个直接连接并相互通信的设备,而不是通过一个中间应用服务器。这些设备通过许多类型的网络进行通信,包括IP网络或internet。这些设备使用蓝牙、Z-Wave或ZigBee等协议来建立直接的D2D通信。Gandotra等人[23]对D2D通信及其相关挑战进行了详细的调查,并提出了一种确保用户克服各种实现挑战的D2D通信架构,包括解决D2D通信的安全挑战。Ru等[80]认为,D2D通信是与蜂窝用户共享频谱的一项重要技术,能够实现高速、便捷的业务。为解决当前D2D通信频谱资源稀缺和功率分配问题,作者提出了D2D通信网络,在D2D通信网络中,所有D2D用户共享频谱资源,并对每个D2D收发机的传输功率进行优化,使系统容量最大化。Lin等人[81]指出,尽管通过D2D辅助蜂窝网络的普及来提高频谱效率、改善蜂窝覆盖、降低功耗和提高用户吞吐量,以支持无处不在的医疗保健应用,这是与D2D辅助蜂窝网络相关的一些好处,然而,它也受到一些挑战和限制;其中包括射频传输对医疗设备的电磁干扰(EMI)、D2D和蜂窝通信在同一频谱中共存导致彼此的跨层干扰(CTI)等。
车联网车辆间交互通信模型
车辆间交互模型实现车辆与其他车辆及其周围环境之间的通信。本节概述了车辆间通信模型的研究现状。特别是,我们对车辆到车辆(V2V)、车辆到基础设施(V2I)、车辆到行人(V2P)、车辆到家庭(V2H)、车辆到道路(V2R)、车辆到屏障(V2B)、车辆到一切(V2X)和车辆到电网(V2G)模型的一些研究工作进行了分类和描述。跨车车型汇总如表4所示。
车辆到车辆交互模型(V2V)
Salameh等人[43]确定了V2V通信的两个不同应用领域。在第一个领域,作者提出了一种通过V2V通信共享GPS信息和支持精确定位的视觉系统来更好地跟踪车辆的技术。讨论了GPS数据无法获取或质量不佳的情况,建立了多个系统的框架,实现了一种新的高级驾驶辅助系统(ADASs)。在第二个领域,他们提出了一种新的模拟框架,旨在通过结合嵌入式数据、视觉数据和V2V仿真来原型化整个过程,从而向防碰撞应用程序发展。他们提出了一种系统架构,使用真实世界的GPS数据和视觉数据的传感器数据来实现汽车跟踪过程和V2V对碰撞预警的影响。Contreras-Castillo等人提出了一个全面的框架,主要关注交互和网络模型,该框架基于分层架构,旨在为车联网系统中的V2V通信提供无缝集成。Chiti等人[44]提出了两种基于匹配的用户关联方法,以最大化车联网间信息共享为目标,以分布式方式满足LTE通信QoS要求和容量限制,研究车联网中信息传播的优化问题。他们还提出了一种点对点网络方案,每个车辆将与其他节点建立多个独立的连接,以实现最佳的网络连通性。Bazzi等人的研究重点是采用一种被称为可视光通信(VLC)的紧急技术,作为指定短程通信(DSRC)和无线电频率(RF)的补充技术,用于车辆之间的数据交换。他们的决定基于VLC的优势,如在大的、未经许可的和无拥塞的带宽下实现短程通信的能力,这与DSRC和LTE技术相比具有优势,DSRC和LTE技术在多个应用程序之间共享有限的带宽。
Lou et al.[46]提出了一种基于V2V DSRC通信的分布式流量监控和信息聚合的创新框架。他们提出的算法旨在监测和报告车辆的交通信息,无论是在拥堵的情况下,还是在非拥堵的情况下,不像VANETs中的许多分布式算法,大多仅局限于拥堵检测。Gao等人[47]对卡车组队场景下专用短距离通信(DSRC) V2V性能进行了实证研究。他们使用DSRC作为一种为车辆环境设计的通信技术,通过利用无线无线电,车辆可以与附近的车辆和道路旁的单位建立有效的通信。他们的研究利用了DSRC的一个基本好处,包括通过增强司机的操作过程来提高安全性,在一个十字路口碰撞警告系统的案例中可以看到,当车辆过快接近有红灯的十字路口时,DSRC会发出警告信号,以便通知其他车辆和行人,以避免碰撞。
车到人的交互模型(V2P)
Fujikami等人[75]发现了使用无线局域网(WLAN)的车辆与行人(V2P)通信相关的问题,并提出了两种解决集体扫描和扩展接收问题的新方法。最近的发展显示,尽管高度电脑化的车辆增加了安全性和便利性,但夜间涉及行人的致命意外个案数目继续增加。Suwa等人[76]提出了一种使用LED投影模块的道路照明系统,该系统将图像信息投影到路面上,实现了人与车之间的通信,从而减少夜间行人的事故。Merdrignac等[77]提出了一种基于感知和V2P通信的新型合作系统,用于保护VRUs。作者认为,对vru的保护已成为非常必要和研究人员感兴趣的课题。vru包括非机动车道路使用者,如行人和骑自行车的人,以及残疾人或行动不便的人。
车辆-路边设施(V2R)交互模型
Gao等人的[48]利用一种新的基本安全信息(BSM)广播方案,使用随机线性网络编码来解决交叉口的信息传播问题。该系统将协助驾驶者了解当地的驾驶环境,对于路口的车辆避免碰撞尤为重要。然而,他们提出的方案未能解决一些问题,这些问题与一个完整的设计健壮和可靠的数据包路由协议的消息传播在道路交叉口。Temel et al.[51]设想,V2R通信系统可以沿着道路部署,以减少乘用车碰撞的数量和严重程度。根据作者的说法,在误入歧途的车辆和路边提供V2R通信可能会导致快速反应安全系统,以检测即将发生的碰撞,提醒司机并采取必要的预防措施。ITS服务和应用的多样性要求车辆与路边单元(RSU)之间以及车辆与车辆之间灵活而高效的连接。近年来,软件定义网络(Software Defined Networking, SDN)的出现引发了人们对车联网模式的重新思考。SDN被认为不仅能有效地提高网络的灵活性和效率,而且还为先进的网络管理提供了平台。Chen等人[52]提出了SD-IoV框架,SD-IoV是SDN和IoV的无缝集成,旨在改进提高了资源利用的效率和灵活性,增强了QoS保障,支持多请求。SD-IoV有潜力继承SDN的优点,被认为是实现未来基于iov的智能交通的一个有竞争力的解决方案。Guo等人提出了一种基于数据完整性和重要性的V2R通信数据访问方案。通过V2R通信的无线接入可用于公共交通工具的流媒体应用。在[54]中提出了一种V2R通信链路上数据流的分层优化访问框架。该框架将考虑应用需求、运输服务提供商的无线连接成本以及无线网络服务提供商的收入。
车辆到基础设施(V2I)交互模型
Bajaj和Khanapurkar[55]强调了道路安全在车辆-基础设施通信中的重要性,因为安全性和效率是V2I通信的主要目标。他们的工作进一步解释了通过车辆网络控制器实现的各种车辆内通信。Bazzi et al.[45]利用可见光通信(VLC)作为DSRC和蜂窝通信的补充技术,用于车辆网络中车辆与rsu之间的数据交换。基于VLC在纯车载可见光网(VVLNs)中使用的局限性,作者提出VLC可以在未来异构车载网络中与其他无线标准一起实现。Alam et al.[56]提出了社会物联网(SIoV)的网络物理架构,SIoV是社会物联网(SIoT)的一个车辆实例。SIoV将利用现有的V2I通信技术。Silva等人的[57]研究了移动内容交付车载网络(MCDVN)的发展,并提出了西格玛部署作为衡量基于基础设施的车载网络中内容交付性能的策略。Harigovindan等人[58]研究了使用比例公平(PF)作为多速率多车道V2I网络中资源分配的基础,用于驾车通过互联网应用。在这种情况下,RSU被以不同的数据速率传输和以不同的平均速度移动的车辆共享。考虑到道路信息中不同的数据更新速率和目前V2I标准的演变,Godoy等人[59]提出了一种新的基于zigbee的辅助AUTOPIA通信方案架构,这将使车辆能够从基础设施获取道路信息,并使自己适应当前的区域配置,而无需实现复杂的路线图。他们提出了一种基于ZigBee技术的低成本基础设施网络的设计和实现,以提醒司机道路上的一些意外情况,以便他们做出适当的决定。
Santa等[60]考虑了车载通信领域的各种网络技术,如蓝牙、ZigBee、超宽带(Ultra-Wide Band, UWB)、Wi-Fi等,提出了蜂窝网络(cellular network, CN)在V2V和V2I通信中的应用和适用性。Dey等人[61]研究了由Wi-Fi、DSRC和LTE技术组成的异构无线网络的性能,以最优的网络资源分配为V2V和V2I通信提供连通性。在[62]中,虽然指出了交通信号对繁忙路口安全运营的重要性,但作者认为,它们仍然是城市环境中旅行延迟的主要原因之一。为此,他们提出了使用基于V2I通信的咨询限速(ASL)控制策略作为交通信号的替代方案。根据作者的说法,使用ASL将在城市街道上走走停停的交通中平滑车辆轨迹,并且在CNs网络上比在DSRC网络上表现更好。数字广播、蜂窝通信和专用短程通信(DSRC)系统用于实现V2I通信的覆盖和容量需求的分析见[63],其中,数字广播系统显示出固有的容量限制,通用移动通信系统(UMTS)设想使用专用信道(DCH)或多媒体广播/多播服务(MBMS)实现V2I链路。在典型的无线网络中,多跳通信是一种用于在遥远的节点之间建立连接的方法。该方法在文献[64]中提出,研究了通过协作车辆作为中间中继,在孤立车辆和遥远的路边单元(RSU)之间建立多跳连接路径的必要条件。
车辆-障碍物(V2B)交互模型
Temel et al.[51]建议在道路沿线部署车辆-障碍通信系统,以帮助最大限度地减少因越野(ROR)事故而导致的乘用车碰撞的严重程度。根据作者的说法,每天都有超过一半的交通事故是由ROR事故造成的,而ROR事故通常只涉及一辆车。因此,车辆与嵌入在路边障碍物中的无线电之间建立的V2B通信将确保车辆保持在道路上,并减轻ROR事故。
车辆到住宅(V2H)交互模型
Shin和Baldick[66]研究了提供外部电网备用断电的车辆到家庭(V2H)操作。在他们的工作中,他们引入了一种以最大化备份时间为目标的新的优化模型,并提出了一种新的V2H系统算法。他们的工作考虑了一种称为车辆到家庭(Vs2Hs)的扩展系统,该系统能够为没有能源资源的家庭提供后备电力,或为系统中的家庭提供更均衡的后备时间。
车辆到电网(V2G)的交互模型
V2G系统为电力系统带来了许多好处,如稳定能源供需波动,帮助插电式电动汽车(PEV)用户降低能源成本[70]。Fechechi等人[71]提出了一种基于6LowPAN无线传感器技术(WSN)和受限应用协议(CoAP)的OpenADR实现。为了证明CoAP的可靠性和适用性,作者考虑了用户为插电式混合动力汽车(PHEV)充电的过程,其中包括一个接受信用卡并控制充电过程的自助服务站。在他们的工作中,作者指出插电式混合动力汽车和pev是下一代智能电网的重要组成部分,因为它们被视为减少温室气体排放的重要交通工具。他们表示,这些电动汽车的电力需求可能对电网构成重大挑战。V2G概念背后的基本思想是,当车辆停车时,利用插电式混合动力汽车/ pev的潜力将电力传输到电网,而电动汽车作为备用电源。由于充电站使用6LowPAN无线传感器网络技术与kiosk连接,作者提出了一种基于CoAP的PEV充电站的需求响应实现方法。Santoshkumar和Udaykumar[72]提出在V2G中应用长期演进(Long Term Evolution, LTE)协议进行电动汽车对电动汽车通信,以促进电动汽车参与电力交易。他们的工作为智能电网中V2G通信的4G/5G网络的发展提供了平台。Huang等人[73]提出了一种具有网络化电动汽车(NEVs)的创新V2G系统,包括数学建模和实际实施。
Floch等人[74]研究了并网插电式电动汽车(pev)的大群体建模和控制,并开发了一种基于偏微分方程(PDE)的技术,用于聚集网格集成pev的大群体。Yoon等[65]提出了一种灵活的V2G智能充电协调方案,用于配备电动汽车充电站的办公楼。所提出的V2G方案通过在V2G协调下对建筑整体负荷进行分配,节约了潜在的能源成本。他们的研究重点是智能建筑中电动汽车充放电的协调。另一个关键的挑战是,V2G通信容易出现漏洞,容易受到网络安全威胁,这些都会影响V2G系统的有效性。Niyato等人[70]采用了一种不同的方法,专注于降低与V2G系统相关的网络风险,并提出了一种替代方法,其中涉及使用网络保险将网络风险从用户转移到第三方的新概念。
车辆-万物(V2X)交互模型
V2X(包括V2V和V2I)通信具有挑战性的一个方面是用户关联策略的设计,该策略决定了车辆应如何与其他车辆和rsu建立通信链路,以提高网络内流通数据的多样性。为此,Chiti et al.[44]研究了车联网中的用户关联问题,旨在优化网络中的信息传播,并提出了一种独立的用户关联方法,模型为Irving s Stable Fixture (ISF),每个车辆可以与其他车辆/基础设施建立独立的连接,而不需要其合作伙伴之间相互连接。Sung等[67]分析了基于lte的V2X的动机和运营场景,并介绍了用例和业务需求。他们还分析了基于lte的V2X面临的主要技术挑战,并提出了相应的设计方案。根据作者的观点,V2X通信技术分为四种不同的类型(车辆到车辆(V2V)、车辆到基础设施(V2I)、车辆到网络(V2N)和车辆到行人(V2P))。基于技术和工业的角度,作者认为基于LTE的V2X是V2X通信的系统和集成解决方案,并指出,LTE网络可以利用无所不在的覆盖,同时可以轻松实现与商业运营商的互操作性。Kopacz等。[68]研究了一个新的概念为屋顶安装车载MIMO天线为V2X通信进行研究两种构型2-element单极子数组和switchless可重构天线,与重点确定最佳配置每个天线类型基于两个用例,也就是说,两辆车之间的视线被建筑物阻挡的死角交叉口场景和干扰避免场景。Seo et al。[69]概述的服务流程和需求V2X LTE系统的服务目标,并讨论场景适合操作其基于LTE网络V2X服务,主要的挑战,如高迁移率和人口密集的车辆环境是解决履行V2X服务的需求。
面向大数据的UIoV新架构
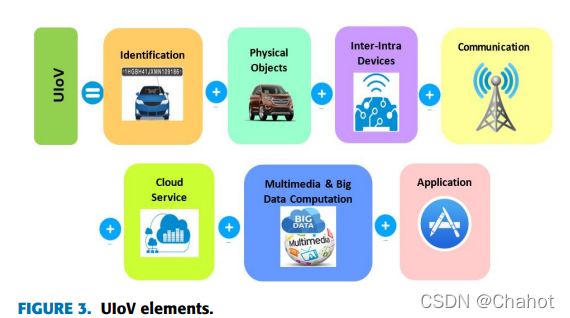
介绍通用车联网(UIoV)体系结构中的主要元素。图3显示了UIoV元素及其层中的构建块组件的示意图。该体系结构有七个核心层:识别层、物理对象层、设备内部层、通信层、云服务层、多媒体层。大数据计算层和应用层。图4显示了提议的基础设施的图形表示。本节还为读者在第六节中对某些特定层的详细讨论做了准备。读者可以参考[85]和[86]中的调查论文,了解关于一般物联网的更多细节。

识别层
在UIoV生态系统中,识别方法可以为每个对象提供清晰的身份。一般来说,生态系统中的对象可以分为两类:车辆对象和非车辆对象。识别层有两个重要的组成部分(命名和寻址)。对于非汽车对象,一个简单的对象名称将是一个RFID标签,代表一个芯片或标签附加提供对象身份。每个对象都有一个名称或对象ID(例如uCode,电子产品代码)。但是,网络中可能有两个或多个对象具有相同的对象ID,且名称可能不是全局唯一的。因此,寻址方案(如IPv4、IPv6)也可以用来唯一地标识对象标识。对于车辆对象,对象ID可以是车辆标识号(VIN),这是一个唯一的代码,包括一个序列号,汽车行业使用它来识别单独的汽车。
物理层
物理对象层收集UIoV生态系统中所有对象(车辆和非车辆)的数据,并将数据传输到设备内部层进行进一步处理。在这里,我们将重点放在UIoV上,对象分为非车辆对象和车辆对象。将非交通工具对象进一步分为多媒体对象和标量对象。标量对象在传统物联网和车联网中具有单一模态(如嵌入式传感器、可穿戴传感器、RFID标签)的特点。多媒体对象可以具有单一模态(例如,来自视觉传感器的图像)或多种模态(例如,可以分解为具有图像模态和信号(语音)模态的视频帧)。不同于传统物联网的UIoV的一个特点是将物体以不同的方式划分为车辆物体和非车辆物体。
内部设备层
内部设备层(Inter-Intra Devices Layer)是传统车联网架构中所没有的一种独特的层。该层结合通信层,使UIoV能够支持V2V、V2R、V2I、V2B、V2H、V2X、V2G、V2P、V2D、V2S和D2D交互等所有类型的交互模型。UIoV内部设备层(Inter-Intra device Layer)和通信层(Communication Layer)的结合,是将不同的、异构的对象和网络连接起来,提供特定的业务。有两个子层,称为设备内和设备间子层,以支持车辆内和车辆间的交互。
内部设备子层
预计到2020年,每辆汽车将配备约数百个传感器和设备[88]。该子层主要关注传感器、可穿戴设备、车身传感器节点、无线微粒等组件与车内中心设备之间的交互。其功能包括数据采集、设备间信息交换等。用于从物理对象层(非车辆)收集数据。,该子层提供多种形式的数据采集和协调,包括通过以太网、Wi-Fi或MOST (Media Oriented System Transport)的车载传感器通信[89],使用苹果或OAA的Android系统CarPlay或近场通信(Near Field Communication, NFC)的车载个人设备通信等。车内数据采集网络技术在车内高效、可靠、及时的数据传输研究可在[90]和[91]中找到。该子层可以包含一些用于本地数据处理的局部功能单元,包括数据过滤和预处理,以避免不相关的信息传播到下一通信层,减少网络流量。因此,该子层可以支持车辆内部的V2P、V2D、V2S和D2D局部交互。
设备间子层
该子层主要关注车联网生态系统中车辆与外部设备、传感器、车辆、行人、建筑等的车与车之间的交互和数据传输。所有由其他车辆和摩托车、行人设备、传感器、建筑和通信设备产生的信息都将实时共享。这种信息交换将通过无线通信实现各种安全和信息娱乐应用。由于异构网络环境在车联网中,利用不同的无线接入技术建立连接,用于数据采集和其他目的。该子层还为DSRC/WAVE、Wi-Fi、4G/LTE等异构网络提供通用的网络协调,与不同的物理对象/网络进行交互,为现有或已有技术提供可靠的通信平台。既考虑了基础设施相关的无线通信,又考虑了独立的无线通信。设计和实现将取决于车联网架构师和目标应用程序的需求
这一子层及其独特的特性使之前的车辆技术研究(包括VANET和its网络)能够集成到UIoV,同时确保从通信层开始的标准互操作性,包括网络连接和更高层次的云平台集成。因此,该子层支持包括V2V、V2R、V2I、V2B、V2X、V2G、V2H在内的所有车间交互。与此同时,作为车联网主要关注点的标准缺失、不同类型网络之间的互操作性和协作问题在车联网中已不再是问题。对于具有多媒体应用的多媒体事物的车联网,这些事物或设备具有产生大量多媒体数据和收集、处理和分析大量多媒体数据的潜力。数据采集后,数据过滤和数据传播是重要的,以避免无关信息的传播,减少网络流量。这个设备内部层有一些局部的功能单元进行预处理(如数据清理)和过滤不相关的信息。它还允许从不同的异构网络收集到的数据组装成公共结构,可由下一通信层到云服务层和internet的后续网络识别。
通信层
物联网中的通信层是连接网络中不同的异构对象,提供特定的服务。其目标是在噪声信道和多跳网络中实现低功耗通信。IEEE 802.15.4是一个定义低速率无线个人区域网(lr - wpan)运行的技术标准。然而,在车联网中,功耗不是问题。在UIoV中,为了保证上层的标准和互操作性,在设备内部层(Inter-Intra - Devices Layer)之后再考虑蜂窝(cellular)或WiMax。4G/5G等蜂窝系统一直在迅速发展,以支持不断增长的移动网络需求。WiMAX(全球微波接入互操作性)包含IEEE 802.16 a/e/m标准。IEEE 802.16标准仅支持固定宽带无线通信,而IEEE 802.16e/mobile WiMAX标准支持高达160公里/小时的速度和不同等级的服务质量,即使是非视距传输。它是一种宽带技术,提供比WiFi网络更高的容量和比蜂窝网络更宽的覆盖范围。WiMAX从固定宽带无线应用、移动WiMAX到具有4G能力的标准,经历了密集的标准发展。这使得WiMAX成为一种很有前途的视频流应用技术。WiMax还能够为丰富的移动互联网和多媒体相关应用提供可靠的通信平台。
云服务层
UIoV云可以由私有云或公有云组成。云虚拟化技术提供了分布式或并行计算环境,允许车联网应用的可扩展性。云计算为客户车联网系统提供硬件计算平台、基础设施和软件服务。硬件基础设施提供可伸缩的服务器和存储,以提供高可靠性和快速的计算响应。云提供的软件服务的一个重要组成部分是接入中心,控制授权用户的访问,确保车联网系统的安全。[87]的工作给出了针对不同应用领域的26个物联网云服务的调查。作者讨论了车联网云面临的七个挑战(标准化、异构性、上下文感知、中间件、物联网节点标识、能量管理和容错)。
多媒体和大数据计算层
多媒体与大数据层由数据预处理、大数据计算、智能传输三个子层组成。这一层包含三个组成部分:(1)硬件;(2)软件;(3)采用分治模式的多媒体组件。硬件组件包括各种计算组件,从数据中心、并行GPU平台到fpga和soc。该软件组件包括智能交通系统(ITS)的图书馆功能,包括安全、导航、实时交通信息等。其他计算组件包括云平台,该平台允许智能对象将其数据发送到云进行实时处理,然后将提取的大数据的结果发送给终端用户。第三个软件组件用于多媒体处理和大数据分析,使用分而治之的模式,将在下一节中讨论。
数据预处理子层
该子层作为数据的预处理层,特别是具有不同模式的多媒体数据。它包含了数据预处理和数据处理等重要功能单元。集中功能单元和多媒体数据聚合功能单元。前者的目的是对数据进行预处理,然后将处理后的数据发送到下一个大数据计算子层。这包括基于自己的标识组合来自同一对象或源的数据。对于具有一种以上模式的多媒体数据,在合并身份之前,数据将按其模式进行预处理和排列。
大数据计算子层
这个子层是为大数据计算和分析而设计的。它由包括Divide和amp在内的大数据计算基本功能单元组成。征服机制、数据分析、数据融合与决策。的分歧,征服机制对于增强体系结构的可扩展性,提高大数据处理的计算效率具有重要的基础性作用。另一些则旨在为从数据中提取的特征的分析和决策提供各种支持。
智能交通子层
这个子层由智能交通的图书馆功能组成。它侧重于一些特定的数据处理和操作,需要高计算能力。它具有交通标志检测和分析、车辆检测和车辆跟踪、事件检测、驾驶员注意力不集中等疲劳检测、行人检测、车道和目标检测、自动车牌识别或车速摄像头监控应用等库功能。这些功能可以与前面子层的其他功能集成。
应用层
这一层以智能应用为代表,从交通安全和效率到基于多媒体的信息娱乐和基于网络的实用应用。应用包括基本的管理系统,如汽车导航、交通信号控制系统、集装箱管理系统、自动车牌号识别或速度摄像头监控应用,如安全闭路电视系统,以及更先进的应用,集成实时数据和其他来源的反馈,如停车引导和信息系统。该层负责向终端用户提供基于多媒体处理信息的智能和批判性分析的智能服务。大数据计算层。UIoV中的应用层负责提供服务,并确定一组用于消息传递的协议。
多媒体和大数据计算
本节介绍了多媒体与大数据计算层,重点介绍了UIoV第六层的智能交通。该层由三个子层组成:(1)数据预处理;(2)大数据计算;(3)智能交通子层。这一层是大数据和多媒体数据处理的核心单元。它还包括支持智能交通计算的库函数。只描述每个子层中的基本功能单元。
数据预处理子层的基本功能单元
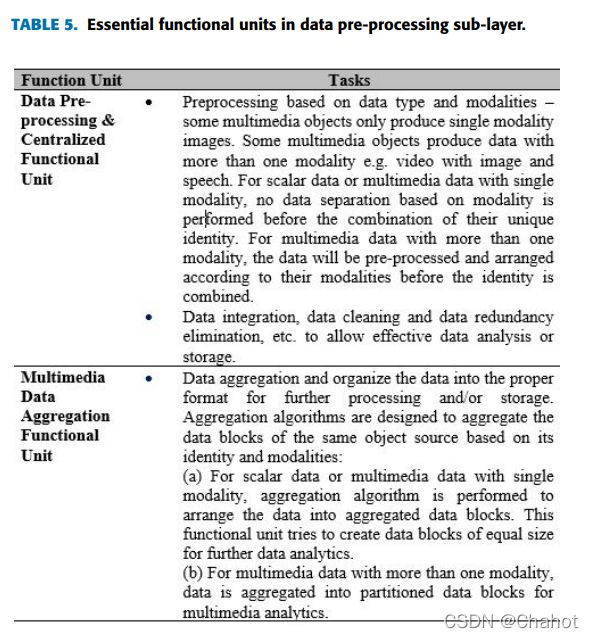
表5显示了这个子层中两个功能单元(数据预处理&集中的表5。数据预处理子层的基本功能单元。功能单元和多媒体数据聚合功能单元。数据可以是标量数据,也可以是具有单一或多重模式的多媒体数据。每个对象都有自己的标识,可以被标识为标量或多媒体对象,以了解模式的预期类型和数量。
大数据计算子层的基本功能单元
这个子层包含了大数据计算的功能单元。以下是一些重要的功能单元。
分而治之计算功能单元
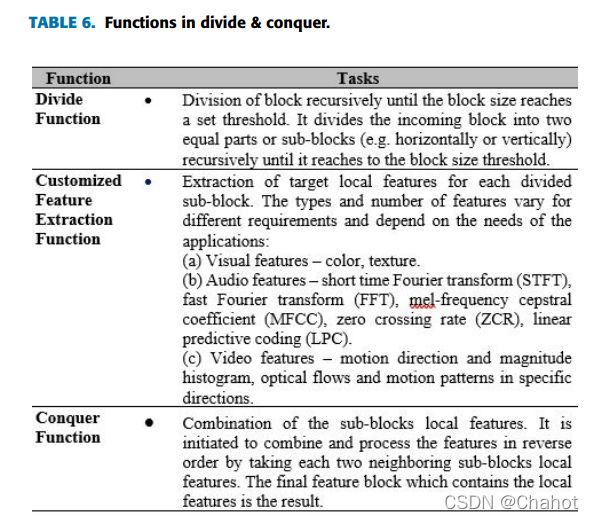
分治计算功能单元提高了计算效率和体系结构的可扩展性,特别适用于多媒体应用。它利用分治机制,并包含分治子路径和各自的计算服务器,有效地处理每个模态的数据,以执行并行处理或任务。具体分治子路径的使用取决于模态。每个子路径的目的是提取基于自身模态的特征,如文本数据的文本特征,音频信号/语音的音频特征,图像数据的视觉特征,以及视频的视听特征(包括运动特征)的组合。对处理的特征类型的兴趣取决于模式和应用场景。聚合数据块的形态决定了选择哪条分治子路径。每个子路径有三个主要功能:分割功能、征服功能和针对特定特征的自定义特征提取功能。表6给出了一个摘要和一些细节“分治”的功能。有兴趣的读者可以参考文献[105]和[106]中现有的大数据信息处理分而治之的方法。
的分歧,征服计算功能单元提高了计算效率和体系结构的可扩展性,尤其适用于多媒体应用。它利用分治机制,并包含分治子路径和各自的计算服务器,有效地处理每个模态的数据,以执行并行处理或任务。具体分治子路径的使用取决于模态。每个子路径的目的是提取基于自身模态的特征,如文本数据的文本特征,音频信号/语音的音频特征,图像数据的视觉特征,以及视频的视听特征(包括运动特征)的组合。对处理的特征类型的兴趣取决于模式和应用场景。聚合数据块的形态决定了选择哪条分治子路径。每个子路径有三个主要功能:分割功能、征服功能和针对特定特征的自定义特征提取功能。表6给出了一个摘要和一些细节“分治”的功能。有兴趣的读者可以参考文献[105]和[106]中现有的大数据信息处理分而治之的方法。
数据融合决策功能单元

大数据分析的目的是从海量数据中推断和提取有用的信息和价值。融合,决策功能单元是计算层的一个重要阶段。该单元配备了决策服务器、计算单元之间通信的基础设施、提取特征和结果的存储设备等支持组件。该功能单元通过发送标量或单模态特征块进行决策,融合过程简单。对于单个模态和特定的应用程序,都有一个定制的决策机制设计。例如,可以使用机器学习技术(如有监督学习、无监督学习或强化学习技术)对模式进行决策。单元的最后一个过程是对来自不同模式的特征进行整合和融合,以做出分类决策。表7显示了一个摘要,并给出了一些关于融合 &决策。主要有两个子功能单元:(1)决策层融合与决策制定;(2)特征级融合与决策。
智能交通子层的基本功能单元
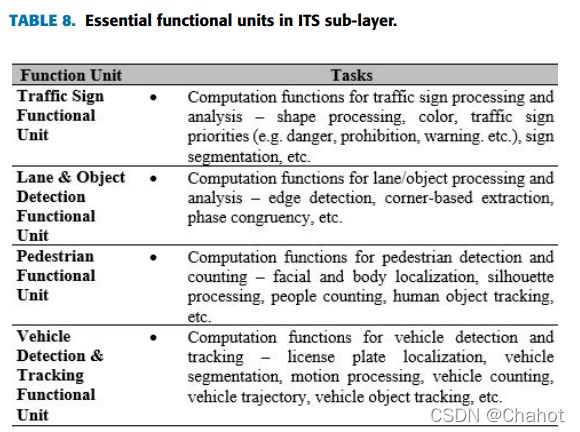
智能交通系统(ITS)的应用技术各不相同。车联网智能应用服务器包括交通安全应用、交通管理应用、服务订阅应用、娱乐应用。其中一些应用程序见表7。融合功能决策。表8所示。ITS子层中的基本功能单元。需要高计算能力,如认知智能交通系统或基于视觉的应用。这个子层充当内部处理引擎。除了自身特有的库功能外,还可以与之前的子层进行交互,进行数据预处理、大数据处理和分析。ITS通常包括四个要素:(1)车辆;(2)司机;(3)行人;(四)道路、交通标志、交通灯、交通控制中心等基础设施。ITS子层主要研究智能交通系统的一些具体数据处理和计算,如交通标志检测和分析、车辆检测和跟踪、事件检测、驾驶员注意力不集中(如分心和疲劳)检测、行人检测、车道和目标检测[15]等。表8给出了ITS子层的一些功能单元的详细信息。
车联网的既存挑战(问题)
本节从两个方面阐述了车联网在智慧城市的应用所面临的挑战:(1)技术挑战;(2)社会挑战。本部分还就智能城市场景中与车联网的车辆的动态特性给出了一些实验性见解。
技术挑战
在智能城市中部署UIoV还面临一些技术挑战。与主要由静态对象组成的物联网相比,UIoV在网络结构中引入了快速移动的节点或对象。我们对UIoV的动态特性和拓扑变化的影响进行了研究。图5为智慧城市场景下UIoV部署的基本场景。

车联网具有高度动态的结构和不断变化的拓扑结构,这可能导致链路故障。这将对汇聚节点的数据包成功发送率和车辆对象的速度产生一定的影响。动态网络结构进一步增加了数据包发送成功率的复杂性。现有物联网协议没有考虑到这一点,因此无法直接应用于大数据采集的车联网。Taha和Alhassan在2018年的最新研究[101]仅研究了中高机动性高速公路场景下节点速度对单个车辆节点的影响。


我们使用RMASE模拟器进行了仿真[102],为未来的研究方向提供了实验性的见解,如大量且不断增长的车辆数量的影响,以及智能城市动态网络结构中的数据包发送成功率。对两种算法进行了仿真:(1)传统的无线路由算法,Adhoc OnDemand Distance Vector (AODV) [103];(2)一种称为TermiteHill[17]的群智能路由技术[107])。仿真使用400个不同速度的移动节点来表示随机分布在拓扑大小为100m 100m的车辆。模拟重复10次,其平均值和95%置信区间如图6 ~图9所示。图6和图7分别为AODV和Termite-Hill对于固定速度为10 m/s (36 km/h)的不同车辆节点数的报文成功率(报文发送)比率。对于传统的AODV,报文的发送成功很大程度上取决于车辆节点的数量。蚁丘算法是一种群体智能技术,它对车辆节点数量的依赖较小。


为了进一步研究,图8和图9分别显示了AODV和Termite-Hill两种情况下,随着车速的增加分组成功率降低。这些实验结果提供了对车联网中车辆对象的动态特性及其速度增长的未来研究方向提出了一些见解。对于UIoV,需要开发对车辆节点数量不太敏感的算法和协议,因为在不同的时间和情况下,网络中的车辆数量可能是不同的。Rivoirard等人[104]对真实世界的轨迹进行了仿真,发现反应性路由协议更适合用于稀疏的车辆网络,而主动路由协议在中等规模的网络中具有更好的性能。其他性能指标(例如吞吐量、端到端延迟、实时车联网应用的延迟)也可以在未来进行研究。车联网面临的另一个重要技术挑战是满足实时限制和对安全攻击的弹性。这对于基于安全的车联网应用来说尤为重要。例如,合作的避碰系统可以检测到潜在的事故(例如,通过突然刹车事件),并提醒邻近的车辆。进一步的挑战将是在整个车联网的异构性质中保持高可伸缩性和可靠性。最后一个挑战是处理安全性和隐私性攻击,例如身份验证和身份识别攻击、可用性攻击、机密性攻击、路由攻击和数据真实性攻击[18]。
社会挑战
在智能城市的UIoV生态系统中,除了技术挑战外,还有社会挑战需要解决。Wang和Chen[11]发现了一个重要的社会挑战,那就是适当的奖励车辆对象作为数据骡子,从智能传感器收集和运输数据。作者指出,奖励政策可能会影响UIoV网络的运行。例如,可以给予较高的奖励,鼓励司机在污染物浓度变化迅速的地区收集数据,而给予较低的奖励,鼓励司机在污染物浓度变化不大的地区收集数据。然而,这种方案可能会导致车辆在奖励较高的区域累积,造成交通拥堵加剧的负面后果。这仍然是一个重要的研究领域,以平衡最佳运行UIoV的技术要求,以及在智慧城市部署适当的激励或奖励。
全文总结
本文综述了现有的车联网体系结构、应用、车辆交互和通信模型等方面的研究工作,提出了基于多媒体和大数据计算的七层车联网体系结构。UIoV是一种通用的车联网体系结构,能够实现包括多媒体设备在内的异构对象之间的集成和协作。除了连接到对象之外,一些特定的层(包括设备内部层)还可以连接到异构网络,并确保标准的互操作性,以便在更高的层次上实现网络连接和与云平台的集成。引入多媒体和大数据计算层,以应对多媒体和大数据的挑战。这一层还能够识别不同类型的对象,并根据其各自的模式排列数据块。这些数据块分布在计算单元和服务器之间,这些计算单元和服务器遵循针对不同模式的分治机制。计算层的优势在于可以根据用户需求从大数据中提取目标特征。这一层还为ITS提供了一些基本功能。在UIoV网络结构中,车辆作为移动节点的动态拓扑结构和速度等因素对汇聚节点的数据包发送成功率的影响也进行了研究。为了实现具有多媒体和大数据计算体系结构的UIoV的真正潜力,需要付出大量的努力来解决这些开放的问题。
[参考文献]
[1] A. Zanella, N. Bui, A. Castellani, L. Vangelista, and M. Zorzi, ‘‘Internet ofThings for smart cities,’’ IEEE Internet Things J., vol. 1, no. 1, pp. 22–32,Feb. 2014.
[2] L.-M. Ang, K. P. Seng, A. M. Zungeru, and G. K. Ijemaru, ‘‘Big sensordata systems for smart cities,’’ IEEE Internet Things J., vol. 4, no. 5,pp. 1259–1271, Oct. 2017.
[3] B. C. Csáji, Z. Kemény, G. Pedone, A. Kuti, and J. Váncza, ‘‘Wirelessmulti-sensor networks for smart cities: A prototype system with statistical data analysis,’’ IEEE Sensors J., vol. 17, no. 23, pp. 7667–7676,Dec. 2017.
[4] H. Chourabi et al., ‘‘Understanding smart cities: An integrative framework,’’ in Proc. 45th Hawaii Int. Conf., Jan. 2012, pp. 2289–2297.
[5] C.-W. Tsai, C.-F. Lai, H.-C. Chao, and A. V. Vasilakos, ‘‘Big data analytics: A survey,’’ J. Big Data, vol. 2, no. 1, pp. 1–32, 2015.
[6] W. Xu et al., ‘‘Internet of vehicles in big data era,’’ IEEE/CAA J. Autom.Sinica, vol. 5, no. 1, pp. 19–35, Jan. 2018.
[7] Y. Fangchun, W. Shangguang, L. Jinglin, L. Zhihan, and S. Qibo,‘‘An overview of Internet of vehicles,’’ China Commun., vol. 11, no. 10,pp. 1–15, Oct. 2014.
[8] S. K. Datta, R. P. F. Da Costa, J. Harri, and C. Bonnet, ‘‘Integratingconnected vehicles in Internet of Things ecosystems: Challenges andsolutions,’’ in Proc. IEEE 17th Int. Symp. World Wireless, Mobile Multimedia Netw. (WoWMoM), Jun. 2016, pp. 1–6.
[56] K. M. Alam, M. Saini, and A. E. Saddik, ‘‘Toward social Internet ofvehicles: Concept, architecture, and applications,’’ IEEE Access, vol. 3,pp. 343–357, Mar. 2015.
[57] C. M. Silva, F. A. Silva, J. F. M. Sarubbi, T. R. Oliveira, W. Meira, Jr.,and J. M. S. Nogueira, ‘‘Designing mobile content delivery networks forthe Internet of vehicles,’’ Veh. Commun., vol. 8, pp. 45–55, Apr. 2017.
[58] V. P. Harigovindan, A. V. Babu, and L. Jacob, ‘‘Proportional fair resourceallocation in vehicle-to-infrastructure networks for drive-thru Internetapplications,’’ Comput. Commun., vol. 40, pp. 33–50, Mar. 2014.
[59] J. Godoy, V. Milanés, J. Pérez, J. Villagrá, and E. Onieva, ‘‘An auxiliaryV2I network for road transport and dynamic environments,’’ Transp.Res. C, Emerg. Technol., vol. 37, pp. 145–156, Dec. 2013.
[60] J. Santa, A. F. Gómez-Skarmeta, and M. Sánchez-Artigas, ‘‘Architectureand evaluation of a unified V2V and V2I communication system based oncellular networks,’’ Comput. Commun., vol. 31, pp. 2850–2861, Jul. 2008.
[61] K. C. Dey, A. Rayamajhi, M. Chowdhury, P. Bhavsar, and J. Martin,‘‘Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network—Performance evaluation,’’Transp. Res. C, Emerg. Technol., vol. 68, pp. 168–184, Jul. 2016.
[62] G. A. Ubiergo and W.-L. Jin, ‘‘Mobility and environment improvement ofsignalized networks through Vehicle-to-Infrastructure (V2I) communications,’’ Transp. Res. C, Emerg. Technol., vol. 68, pp. 70–82, Jul. 2016.
[63] P. Belanovic, D. Valerio, A. Paier, T. Zemen, F. Ricciato, andC. F. Mecklenbrauker, ‘‘On wireless links for vehicle-to-infrastructurecommunications,’’ IEEE Trans. Veh. Technol., vol. 59, no. 1, pp. 269–282,Jan. 2010.
[64] R. Atallah, M. Khabbaz, and C. Assi, ‘‘Multihop V2I communications:A feasibility study, modeling, and performance analysis,’’ IEEE Trans.Veh. Technol., vol. 66, no. 3, pp. 2801–2810, Mar. 2017.
[65] S. Yoon, K. Park, and E. Hwang, ‘‘Connected electric vehicles for flexible vehicle-to-grid (V2G) services,’’ in Proc. IEEE ICOIN, Jan. 2017,pp. 411–413.
[66] H. Shin and R. Baldick, ‘‘Plug-in electric vehicle to home (V2H) operation under a grid outage,’’ IEEE Trans. Smart Grid, vol. 8, no. 4,pp. 2032–2041, Jul. 2017.
[67] K. Sung, J. Lee, and J. Shin, ‘‘Study of CAN-to-3GPP LTE gatewayarchitecture for automotive safety in V2I environment,’’ in Proc. ICACT,2015, pp. 256–259.
[68] T. Kopacz, A. Narbudowicz, D. Heberling, and M. J. Ammann, ‘‘Evaluation of automotive MIMO antennas for V2V communication inurban intersection scenarios,’’ in Proc. 11th IEEE Eur. Conf. AntennasPropag. (EUCAP), Mar. 2017, pp. 2907–2911.
[69] H. Seo, K.-D. Lee, S. Yasukawa, Y. Peng, and P. Sartori, ‘‘LTE evolutionfor vehicle-to-everything services,’’ IEEE Commun. Mag., vol. 54, no. 6,pp. 22–28, Jun. 2016.
[70] D. Niyato, D. T. Hoang, P. Wang, and Z. Han, ‘‘Cyber insurance forplug-in electric vehicle charging in vehicle-to-grid systems,’’ IEEE Netw.,vol. 31, no. 2, pp. 38–46, Mar./Apr. 2017.
[71] A. Fechechi et al., ‘‘A new vehicle-to-grid system for battery charging exploiting IoT protocols,’’ in Proc. IEEE Int. Conf. Ind. Technol.,Mar. 2015, pp. 2154–2159.
[72] S. Kumar and R. Y. U. Kumar, ‘‘Performance analysis of LTE protocolfor EV to EV communication in vehicle-to-grid (V2G),’’ in Proc. IEEE28th Can. Conf. Elect. Comput. Eng., May 2015, pp. 1567–1571.
[73] R. Huang et al., ‘‘Integration of IEC 61850 into a vehicle-to-grid systemwith networked electric vehicles,’’ in Proc. ISGT, 2015, pp. 1–5.
[74] C. Le Floch, F. Di Meglio, and S. Moura, ‘‘Optimal charging of vehicleto-grid fleets via PDE aggregation techniques,’’ in Proc. Amer. ControlConf. (ACC), Jul. 2015, pp. 3285–3291.
[75] S. Fujikami, T. Sumi, R. Yagiu, and Y. Nagai, ‘‘Fast device discoveryfor vehicle-to-pedestrian communication using wireless LAN,’’ in Proc.12th Annu. IEEE Consum. Commun. Netw. Conf. (CCNC), Jan. 2015,pp. 35–40.
[76] M. Suwa, M. Nishimuta, and R. Sakata, ‘‘LED projection module enablesa vehicle to communicate with pedestrians and other vehicles,’’ in Proc.IEEE Int. Conf. Consum. Electron. (ICCE), Jan. 2017, pp. 37–38.
[77] P. Merdrignac, O. Shagdar, and F. Nashashibi, ‘‘Fusion of perception andV2P communication systems for the safety of vulnerable road users,’’IEEE Trans. Intell. Transp. Syst., vol. 18, no. 7, pp. 1740–1751, Jul. 2017.
[78] C. Spelta, V. Manzoni, A. Corti, A. Goggi, and S. M. Savaresi,‘‘Smartphone-based vehicle-to-driver/environment interaction system formotorcycles,’’ IEEE Embedded Syst. Lett., vol. 2, no. 2, pp. 39–42,Jun. 2010.
[79] K. Rose, S. Eldridge, and L. Chapin. The Internet of Things: AnOverview—Understanding the Issues and Challenges of a More Connected World.
[Online]. Available: https://dig.watch/resources/internetthings-iot-overview-understanding-issues-and-challenges-moreconnected-world
[80] M. Ru, S. Yin, and Z. Qu, ‘‘Power and spectrum allocation in D2Dnetworks based on coloring and chaos genetic algorithm,’’ ProcediaComput. Sci., vol. 107, pp. 183–189, Jan. 2017.
[81] D. Lin, Y. Tang, Y. Yao, and A. V. Vasilakos, ‘‘User-priority-based powercontrol over the D2D assisted Internet of vehicles for mobile health,’’IEEE Internet Things J., vol. 4, no. 3, pp. 824–831, Jun. 2017.
[82] R. I. Meneguette and A. Boukerche, ‘‘SERVitEs: An efficient search andallocation resource protocol based on V2V communication for vehicularcloud,’’ Comput. Netw., vol. 123, pp. 104–118, Aug. 2017.
[83] Y. Xie et al., ‘‘STM32-based vehicle data acquisition system for Internetof-vehicles,’’ in Proc. IEEE Comput. Soc., May 2017, pp. 895–898.
[84] T. T. Dandala, V. Krishnamurthy, and R. Alwan, ‘‘Internet of vehicles(IoV) for traffic management,’’ in Proc. IEEE Int. Conf., Commun. SignalProcess. (ICCCSP), Jan. 2017, pp. 1–4.
[85] J. Zheng, D. Simplot-Ryl, C. Bisdikian, and H. T. Mouftah, ‘‘The Internetof Things,’’ IEEE Commun. Mag., vol. 49, no. 11, pp. 30–31, Nov. 2011.
[86] A. Al-Fuqaha, M. Guizani, M. Mohammadi, M. Aledhari, and M. Ayyash,‘‘Internet of Things: A survey on enabling technologies, protocols,and applications,’’ IEEE Commun. Surveys Tuts., vol. 17, no. 4,pp. 2347–2376, 4th Quart., 2015.
[87] P. P. Ray, ‘‘A survey of IoT cloud platforms,’’ Future Comput. Inform. J.,vol. 1, nos. 1–2, pp. 35–46, 2016.
[88] M. Pinelis, ‘‘Automotive sensors and electronics: Trends and developments in 2013,’’ in Proc. Automot. Sensors Electron. Expo, Detroit, MI,USA, Oct. 2013.
[89] A. Sumorek and M. Buczaj, ‘‘New elements in vehicle communication‘media oriented systems transport’ protocol,’’ Motorization EnergeticsAgricult., vol. 12, no. 1, pp. 275–279, 2012.
[90] C. Chen and Y. Zhu, ‘‘Augmenting vehicular 3G users through intervehicle communications,’’ in Proc. Wireless Commun. Netw. Conf.(WCNC), Apr. 2013, pp. 1651–1656.
[91] Y. Yao, L. Rao, X. Liu, and X. Zhou, ‘‘Delay analysis and study of IEEE802.11p based DSRC safety communication in a highway environment,’’in Proc. IEEE INFOCOM, Apr. 2013, pp. 1591–1599.
[92] R. Lu, X. Lin, H. Zhu, and X. Shen, ‘‘SPARK: A new VANET-based smartparking scheme for large parking lots,’’ in Proc. INFOCOM, Apr. 2009,pp. 1413–1421.
[93] F. Mohammed, A. Idries, N. Mohamed, J. Al-Jaroodi, and I. Jawhar,‘‘UAVs for smart cities: Opportunities and challenges,’’ in Proc. Int. Conf.Unmanned Aircraft Syst., May 2014, pp. 267–273.
[94] M. M. Coutinho, A. Efrat, T. Johnson, A. Richa, and M. Liu, ‘‘Healthcare supported by data mule networks in remote communities of theAmazon region,’’ Int. Scholarly Res. Notices, vol. 2014, Oct. 2014,Art. no. 730760, doi: 10.1155/2014/730760.
[95] S.-C. Hu, Y.-C. Wang, C.-Y. Huang, and Y.-C. Tseng, ‘‘Measuring airquality in city areas by vehicular wireless sensor networks,’’ J. Syst.Softw., vol. 84, no. 11, pp. 2005–2012, 2011.
[96] V. Sivaraman, J. Carrapetta, K. Hu, and B. G. Luxan, ‘‘HazeWatch:A participatory sensor system for monitoring air pollution in Sydney,’’in Proc. IEEE Workshop Practical Issues Building Sensor Netw. Appl.,Oct. 2013, pp. 56–64.
[97] T. Matarazzo, M. Vazifeh, S. Pakzad, P. Santi, and C. Ratti, ‘‘Smartphonedata streams for bridge health monitoring,’’ in Proc. Int. Conf. Struct.Dyn., 2017, pp. 966–971.
[98] C. W. Yi, Y. T. Chuang, and C. S. Nian, ‘‘Toward crowdsourcing-basedroad pavement monitoring by mobile sensing technologies,’’ IEEE Trans.Intell. Transp. Syst., vol. 16, no. 4, pp. 1905–1917, Aug. 2015.
[99] A. Mednis, A. Elsts, and L. Selavo, ‘‘Embedded solution for road condition monitoring using vehicular sensor networks,’’ in Proc. Int. Conf.Appl. Inf. Commun. Technol., Oct. 2012, pp. 1–5.
[100] U. Lee, B. Zhou, M. Gerla, E. Magistretti, P. Bellavista, and A. Corradi,‘‘MobEyes: Smart mobs for urban monitoring with a vehicular sensornetwork,’’ IEEE Wireless Commun., vol. 13, no. 5, pp. 52–57, Oct. 2006.
[101] H. H. Taha and A. M. Alhassan, ‘‘Performance evaluation of AODV,OLSR and GRP routing protocols in vehicular highway environment,’’in Proc. Int. Conf. Comput., Control, Elect. Electron. Eng., Aug. 2018,pp. 1–5.
[102] Y. Zhang, G. Simon, and G. Balogh, ‘‘High-level sensor network simulations for routing performance evaluations,’’ in Proc. 3rd Int. Conf. Netw.Sens. Syst., 2006, pp. 1–4.
[103] C. E. Perkins and E. M. Royer, ‘‘Ad hoc on-demand distance vectorrouting,’’ in Proc. IEEE Workshop Mobile Comput. Appl., Feb. 1999,pp. 90–100.
[104] L. Rivoirard, M. Wahl, P. Sondi, M. Berbineau, and D. Gruyer, ‘‘Performance evaluation of AODV, DSR, GRP and OLSR for VANET with realworld trajectories,’’ in Proc. IEEE Int. Conf. ITS Telecommun., May 2017,pp. 1–7.
[105] J. K. P. Seng and K. L.-M. Ang, ‘‘Big feature data analytics: Split andcombine linear discriminant analysis (SC-LDA) for integration towardsdecision making analytics,’’ IEEE Access, vol. 5, pp. 14056–14065, 2017.
[106] A. Ahmad, A. Paul, and M. M. Rathore, ‘‘An efficient divide-and-conquerapproach for big data analytics in machine-to-machine communication,’’Neurocomputing, vol. 174, pp. 439–453, Jan. 2016.
[107] A. M. Zungeru, L. M. Ang, and K. P. Seng, ‘‘Termite-hill: Routing towards a mobile sink for improving network lifetime in wireless sensor networks,’’ in Proc. 3rd Int. Conf. Intell. Syst., ModellingSimulation (ISMS), Feb. 2012, pp. 622–627.