IMX6ULL Linux内核移植
本次移植实验使用的是正点原子开发板ALPHA V2.2
交叉编译工具:gcc-linaro-5.5.0-2017.10-x86_64_arm-linux-gnueabihf
使用的是NXP官方开发板的Linux内核源码移植

然后解压把目录改为自己工程的名字,我这里改成
linux-imx-rel_imx_4.1.15_2.1.0_ga_myimx
首先就是配置文件,我们复制一份配置文件,更改为我们自己的名字
cd arch/arm/configs/
cp imx_v7_mfg_defconfig imx_myimx_emmc_defconfig
接下来就是设备树文件复制,在目录 arch/arm/boot/dts中,复制一份imx6ull-14x14-evk.dts,然后将其重命名为 imx6ull-myimx-emmc.dts
cd arch/arm/boot/dts
cp imx6ull-14x14-evk.dts imx6ull-myimx-emmc.dts
复制完后我们需要更改arch/arm/boot/dts/Makefile的Makefile文件。
找到dtb-$(CONFIG_SOC_IMX6ULL)的配置项,加入
imx6ull-myimx-emmc.dtb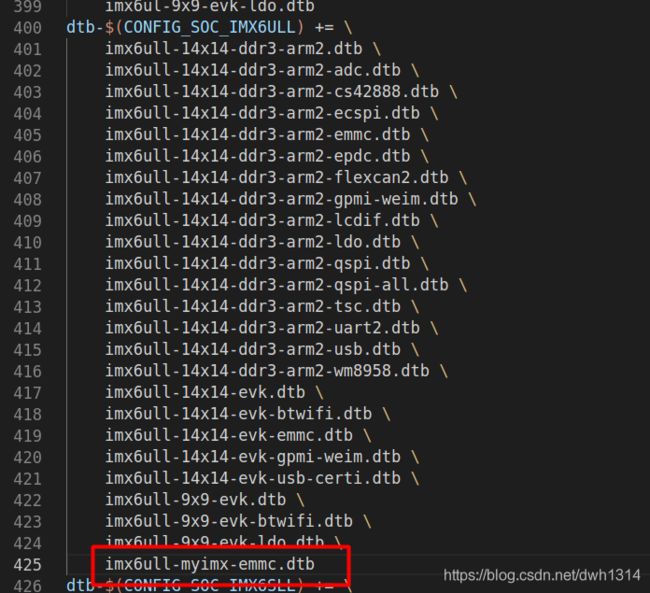
下面我们就可以开始编译了
输入命令
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- imx_myimx_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j4

编译成功
编译成功后会在目录 arch/arm/boot 下生成 zImage 镜像文件。在 arch/arm/boot/dts 目录
下生成 imx6ull-myimx-emmc.dtb 文件
然后我们拷贝到tftp服务器下 让uboot启动时拷贝zImage文件和dtb文件并且启动
cp arch/arm/boot/dts/imx6ull-myimx-emmc.dtb /home/dwh/linux/tftpboot/
cp arch/arm/boot/zImage /home/dwh/linux/tftpboot/
 然后重启开发板,在
然后重启开发板,在
uboot 命令模式中使用 tftp 命令下载这两个文件并启动
tftp 80800000 zImage
tftp 83000000 imx6ull-myimx-emmc.dtb
bootz 80800000 – 83000000

重启后,我们可以看到linux内核已经成功启动!
在这里Linux内核已经启动了,但是我们还需要修改网络驱动,因为正点原子的开发板与NXP官方的板子是不一样的,因此我们要修改网络驱动
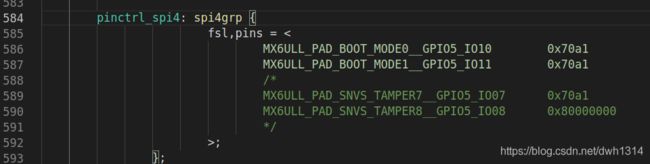
首先把imx6ull_myix_emmc.dts里面 588和599行
初始化 SNVS_TAMPER7 和 SNVS_TAMPER8 这两个
引脚的,是作为了 SPI4 的 IO,这不是我们想要的,所以将 588 和 589 这两行
删除掉!
第 129 行,设置 GPIO5_IO08 为 SPI4 的一个功能引脚(我也不清楚具体作为什么功能用), 而 GPIO5_IO08 就是 SNVS_TAMPER8 的 GPIO 功能引脚。
第 133 行,设置 GPIO5_IO07 作为 SPI4 的片选引脚,而 GPIO5_IO07 就是 SNVS_TAMPER7
的 GPIO 功能引脚。

现在我们需要 GPIO5_IO07 和 GPIO5_IO08 分别作为 ENET1 和 ENET2 的复位引脚,而不
是 SPI4 的什么功能引脚,因此将第 129 行和第 133 行处的代码删除掉!!
否则会干扰到网络复位引脚!
面找到名为“iomuxc_snvs”的节点,然后在
此节点下添加网络复位引脚信息
更改后如下
&iomuxc_snvs {
pinctrl-names = "default_snvs";
pinctrl-0 = <&pinctrl_hog_2>;
imx6ul-evk {
pinctrl_hog_2: hoggrp-2 {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER0__GPIO5_IO00 0x80000000
>;
};
pinctrl_dvfs: dvfsgrp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER3__GPIO5_IO03 0x79
>;
};
pinctrl_lcdif_reset: lcdifresetgrp {
fsl,pins = <
/* used for lcd reset */
MX6ULL_PAD_SNVS_TAMPER9__GPIO5_IO09 0x79
>;
};
pinctrl_spi4: spi4grp {
fsl,pins = <
MX6ULL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1
MX6ULL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1
/*
MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1
MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000
*/
>;
};
pinctrl_sai2_hp_det_b: sai2_hp_det_grp {
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER4__GPIO5_IO04 0x17059
>;
};
pinctrl_enet1_reset: enet1resetgrp {
fsl,pins = <
/* used for enet1 reset */
MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x10B0
>;
};
/*enet2 reset zuozhongkai*/
pinctrl_enet2_reset: enet2resetgrp {
fsl,pins = <
/* used for enet2 reset */
MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x10B0
>;
};
};
};

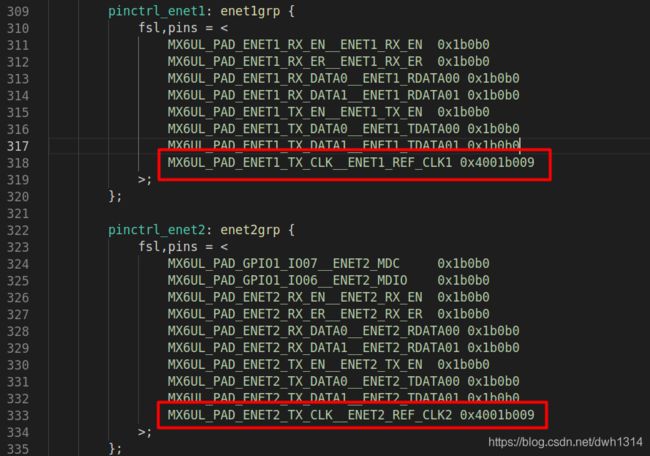
最后更改一下网络的时钟引脚电气属性
MX6UL_PAD_ENET1_TX_CLK__ENET1_REF_CLK1 0x4001b009
MX6UL_PAD_ENET2_TX_CLK__ENET2_REF_CLK2 0x4001b009
将这两个引脚的电气属性值改为 0x4001b009,原来默认值为 0x4001b031
然后找到 fec1、fec2 这两个节点修改修改为如下
&fec1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_enet1
&pinctrl_enet1_reset>;
phy-mode = "rmii";
phy-handle = <ðphy0>;
phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>;
phy-reset-duration = <200>;
status = "okay";
};
&fec2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_enet2
&pinctrl_enet2_reset>;
phy-mode = "rmii";
phy-handle = <ðphy1>;
phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;
phy-reset-duration = <200>;
status = "okay";
mdio {
#address-cells = <1>;
#size-cells = <0>;
ethphy0: ethernet-phy@0 {
compatible = "ethernet-phy-ieee802.3-c22";
smsc,disable-energy-detect;
reg = <0>;
};
ethphy1: ethernet-phy@1 {
compatible = "ethernet-phy-ieee802.3-c22";
smsc,disable-energy-detect;
reg = <1>;
};
};
};
然后编译
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- dtb
然后生成了设备树dtb文件
然后修 改 一 下 Linux 内 核 源 码 , 打 开
drivers/net/ethernet/freescale/fec_main.c,找到函数 fec_probe,在 fec_probe 中加入如下代码
void __iomem *IMX6U_ENET1_TX_CLK;
void __iomem *IMX6U_ENET2_TX_CLK;
IMX6U_ENET1_TX_CLK = ioremap(0X020E00DC, 4);
writel(0X14, IMX6U_ENET1_TX_CLK);
IMX6U_ENET2_TX_CLK = ioremap(0X020E00FC, 4);
writel(0X14, IMX6U_ENET2_TX_CLK);

输入命令
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig,打开图形化配置界面,选择使能 LAN8720A 的驱动,路径
如下:
-> Device Drivers
-> Network device support
-> PHY Device support and infrastructure
-> Drivers for SMSC PHYs

修改 smsc.c 文件
首先需要找到 LAN8720A 的驱动文件,LAN8720A 的驱动文件是 drivers/net/phy/smsc.c,
在此文件中有个叫做 smsc_phy_reset 的函数,看名字都知道这是 SMSC PHY 的复位函数,因
此,LAN8720A 肯定也会使用到这个复位函数,修改此函数的内容,修改以后的 smsc_phy_reset
函数内容如下所示
static int smsc_phy_reset(struct phy_device *phydev)
{
int err, phy_reset;
int msec = 1;
struct device_node *np;
int timeout = 50000;
if(phydev->addr == 0)
{
np = of_find_node_by_path("/soc/aips-bus@02100000/ethernet@02188000");
if (np == NULL)
{
return -EINVAL;
}
}
if(phydev->addr == 1)
{
np = of_find_node_by_path("/soc/aips-bus@02000000/ethernet@020b4000");
if (np == NULL)
{
return -EINVAL;
}
}
err = of_property_read_u32(np, "phy-reset-duration", &msec);
if (!err && msec > 1000)
msec = 1;
phy_reset = of_get_named_gpio(np, "phy-reset-gpios", 0);
if (!gpio_is_valid(phy_reset))
return;
gpio_direction_output(phy_reset, 0);
gpio_set_value(phy_reset, 0);
msleep(msec);
gpio_set_value(phy_reset, 1);
int rc = phy_read(phydev, MII_LAN83C185_SPECIAL_MODES);
if (rc < 0)
return rc;
if ((rc & MII_LAN83C185_MODE_MASK) ==MII_LAN83C185_MODE_POWERDOWN) {
/* set "all capable" mode and reset the phy */
rc |= MII_LAN83C185_MODE_ALL;
phy_write(phydev, MII_LAN83C185_SPECIAL_MODES, rc);
}
phy_write(phydev, MII_BMCR, BMCR_RESET);
do {
udelay(10);
if (timeout-- == 0)
return -1;
rc = phy_read(phydev, MII_BMCR);
} while (rc & BMCR_RESET);
return 0;
}
完工,保存,编译!!
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- imx_myimx_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j4

编译完成。
复制zImage 和 设备树文件到 tftpboot
cp arch/arm/boot/dts/imx6ull-myimx-emmc.dtb /home/dwh/linux/tftpboot/
cp arch/arm/boot/zImage /home/dwh/linux/tftpboot/
启动Uboot时设置一下参数,更改根文件系统nfs的地址 和tftp下载的地址
setenv bootcmd 'tftp 80800000 zImage; tftp 83000000 imx6ull-alientek-emmc.dtb; bootz 80800000 - 83000000'
setenv bootargs 'console=ttymxc0,115200 rw root=/dev/nfs nfsroot=192.168.0.9:/home/dwh/linux/nfs/rootfs ip=192.168.0.20:192.168.0.9:192.168.0.1:255.255.255.0::eth0:off'
启动网卡
ifconfig eth0 up
ifconfig eth0 192.168.0.20
启动!
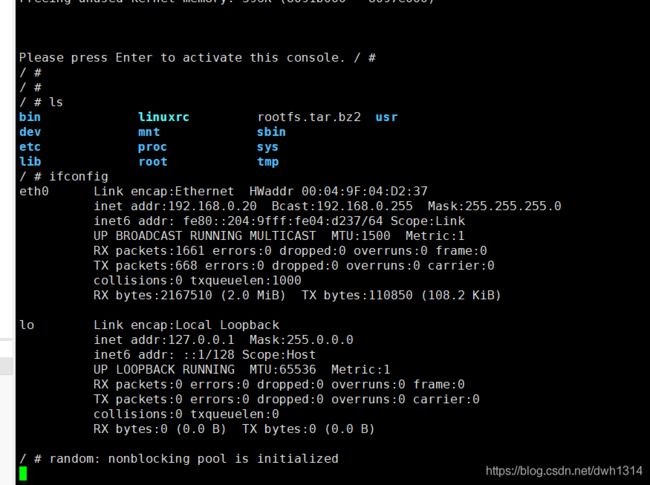
最后成功使用网络!!
![在这里插入图片描述](https://img-blog.csdnimg.cn/61ff6e2a340b46928150123f11212c65.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2R3aDEzMTQ=,size_16,color_FFFFFF,t_70