http://blog.sina.com.cn/s/blog_77805ef60100pgip.html
无人机(UAV)遥感是航空遥感的一种重要方式,并且日益成为一项空间数据获取的重要手段,其具有续航时间长、影像实时传输、高危地区探测、成本低、机动灵活等优点,是卫星遥感与有人机航空遥感的有力补充。近年来,无人机在军事和民用方面都得到了快速的发展,引起了诸多科研单位的重视,无人机遥感成为发展的一种趋势。
但是,由于无人机飞行环境的复杂性以及飞行的不稳定性,导致无人机数据的POS信息不够精确、数据量大等特点,所以处理无人机数据成为亟待解决的问题。
利用LPS软件来处理无人机数据,得到正射校正镶嵌结果,为无人机数据处理提供了新的解决方案,满足了无人机在测绘方面以及灾害应急快速处理方面的需要。
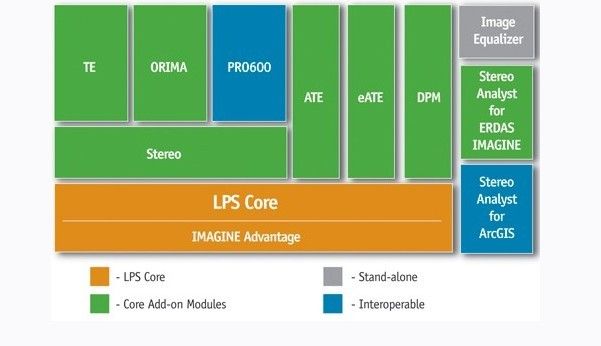
LPS(Leica Photogrammetry Suite)是徕卡公司推出的数字摄影测量及遥感处理软件系列。LPS为影像处理及摄影测量提供了高精度及高效能的生产工具。它可以处理各种航天(最常用的卫星影像包括QuickBird/ALOS/GeoEye/SPOT5等等)及航空(扫描航片、ADS40数字影像)的各类传感器影像定向及空三加密,处理各种数字影像格式,黑/白、彩色、多光谱及高光谱等各类数字影像。LPS的应用还包括矢量数据采集、数字地模生成、正射影像镶嵌及遥感处理,它是第一套集遥感与摄影测量在单一工作平台的软件系列。LPS产品结构如图一所示。
图一 LPS产品结构图
本文在无人机数据处理中利用的LPS的模块包括:LPS Core和ATE(或者eATE)。
数据描述
本文所用的测试数据是由数码相机(Canon EOS 5D Mark II)拍摄的473幅无人机数据。除此之外,还利用了焦距长(f0=24mm)、象元分辨率(CCD尺寸=6.4um)、航高以及POS数据等信息。
LPS处理无人机数据流程
LPS处理无人机数据操作流程如图二所示:
图二 LPS 处理无人机数据操作流程
(1)创建工程和数据导入
创建工程:LPS处理数据首先需要创建测区文件,即Block文件。选择相应的几何校正模型。这里我们选择的模型是数码相机(Digital Camera)。并且定义测区的属性,包括投影坐标系统、航高等。
数据导入:工程文件创建好之后,导入数据:影像、相机参数(像主点坐标、焦距长、CCD尺寸等)及POS数据。
(2)自动生成同名点
根据初始的POS数据,自动生成同名点。根据需要,可修改生成同名点的策略,使产生的同名点均匀地分布在整个测区。
(3) 空三计算
根据生成的大量同名点及初始的内外方位信息,进行空三运算,空三结果可以通过RMSE来体现,并可以预览每个同名点的坐标和精度,内附详细的精度报告。通过预览每个点的RMSE,剔除误差较大的同名点,重新进行空三计算,直至满足要求。接受空三结果,更新内外方位信息。
(4)生成DTM
LPS提取DTM是全自动处理过程,内附详细的DTM提取报告。用户可以根据需要选择生成单个DTM,或者直接生成镶嵌的DTM。其精度适合于制作正射影像。若需要得到高精度的DTM,仍需要一些人工编辑(比如通过TE模块)以及很好的质量控制。
(5)影像正射校正
效率一直是遥感影像处理用户最关心的问题之一,ERDAS 通过多个处理或者多个计算机实现并行计算技术和分布式处理,使得用户在数据处理过程中可以充分利用硬件的投资,提高数据生产的效率。LPS在影像重采样的过程中支持批处理的并行计算和分布式处理。
(6)正射校正结果镶嵌
LPS 2010的镶嵌充分利用操作系统资源,使得镶嵌的速度提高了10倍以上,并能支持海量影像的输入和输出,自动生成拼接线并可编辑,多种匀色算法可供选择。
结果
由一名操作人员利用一台普通工作站处理473幅无人机数据,经过26小时的处理,其中自动运算时间为22小时,最后空三的精度可以达到3个像素。LPS处理数据的结果如下图所示:
图三 LPS处理无人机数据镶嵌结果
LPS处理无人机数据的建议:
(1)所提供的无人机数据,如果存在部分影像比较模糊。这可能会对后续的影像连接点匹配造成一定影响,所以去除影像质量不好的数据。
(2)提供的无人机数据包括部分航线拐角数据,该数据对应的惯导数据信息不够准确,因此在实际作业中,会将拐角数据去除,以保证整个测区空三计算的精度。
(3)提供的无人机数据中,去除掉POS信息(特别是角度信息)突变的数据,这样保证连接点匹配的精度和最终结果的精度。
(4)确保相片与其POS数据完全对应,可能由于POS录入的问题,导致相片的POS信息和相片不对应。
(5)为了提高结果的精度,建议采用二级优化策略。首先根据原始的POS信息,自动产生连接点,进行空三,接受优化内外方位信息;然后根据第一次优化的结果,再次自动生成连接点,进行空三运算。
结语
通过使用LPS处理无人机数据,采用严密的光束法区域网平差,在保证一定的精度下,以较少的人工干预,能够以最快的速度完成整个测区的处理过程。在影像重采样过程中支持批处理的并行计算和分布式处理,提高数据生产的效率,且对机器硬件要求不高,一般的工作站即可处理,这满足了无人机数据在测绘方面(正射影像/镶嵌/DTM等系列测绘产品)以及灾害应急快速处理方面的需要,为无人机数据处理市场提供了新的解决方案。