蓝桥杯嵌入式比赛知识点合集(现在什么都有好吧)
目录
- 新建工程
- LCD
-
- sprintf
-
- 格式
- 输出百分号
- 输出格式:%R
- memset函数
- LCD_DisplayStringLine函数
- 嘀嗒定时器
- 高亮
-
- 行高亮
- 一两个字符高亮
-
- 单个字节高亮
-
- 使用
- 多个字节高亮
-
- 使用
- 行闪烁
-
-
- 使用
-
- LED
-
- display函数
-
-
- 注意:为了解决与LCD的冲突问题,需要改变lcd.c里的三个函数——
-
- Time_Base
-
- 中断服务函数
- Buzzer
-
- 使能
- 配置GPIO
- KEY
-
- 变量调用
- 注意宏定义运算表达式
- Scan函数
- Disp函数
-
- 只考虑短按(单击)
- 考虑长短按
- E2PROM
-
- 掉电不丢失
- 写入数据函数
- 读取多个数据
- 多类型读写
- 注意
- RTC
-
- 快速配置
- ADC
-
- 注意的点
- PWM
-
- 定时器通道引脚分布图表
- 输出两路频率固定占空比可调的 PWM----文件名:PWM_Output
-
- 快速配置
- 设置占空比
- 使用方法
- 输出两路频率可调占空比可调的 PWM----文件名:OCToggle
-
- 快速配置
- 使用方法
-
- 注意:
- 捕获一路PWM的频率和占空比----文件名:PWM_Input
-
- 快速配置
- 使用方法
-
- 注意:
- 捕获两路PWM的频率和占空比
-
- 思路
- 代码
- 串口与TIM2冲突问题
- 串口
-
- 基本知识
- 使用
- 闲时判断
- 善用状态
- C语言知识点
-
- 字符与字符串
-
- strcpy 复制
- strcmp 比较
- strlen 取长度(不包括结尾'\0')
- strcat 追加拷贝
- 注意
- 提取字符串
新建工程
不推荐自己新建工程,直接用他给的例程,复制一份,然后加上一个bsp文件夹放自己新建的.h.c文件就行了,会方便很多。
LCD
sprintf
格式
sprintf((char*)buf," The Humam : %d ",200);
注意是(char*)不是(char);
注意字符长度不能超过20(数组长度),否则LED不会亮。
长度最好写19个。
记得加上头文件"stdio.h"。
输出百分号
sprintf((char*) display_buf,"%d %% ",10); //输出百分号:%
注:要打两个百分号才行。
输出格式:%R
%d 整型输出,%ld 长整型输出,
%o 以八进制数形式输出整数,
%x 以十六进制数形式输出整数,
%u 以十进制数输出 unsigned 型数据 (无符号数)。16进制转十进制非常有用。
%c 用来输出一个字符,
%s 用来输出一个字符串,
%f 用来输出实数,以小数形式输出,
%e 以指数形式输出实数,
%g 根据大小自动选 f 格式或 e 格式,且不输出无意义的零。
memset函数
memset(buf,0,20 * sizeof(uint8_t));
加头文件"string.h"。
memset 的用法详解
LCD_DisplayStringLine函数
LCD_DisplayStringLine(Line4,buf);
buf 只能是unsigned char类型。

嘀嗒定时器
配置了嘀嗒定时器一定要写中断服务程序,不然LCD不会起作用。
高亮
行高亮
/* 如果标志位为1,则让当前行高亮为绿色 */
if(lcd_light == 1)LCD_SetBackColor(Green);
sprintf((char*)Buf," Threshold 1: %02ucm ",Threshold_Buf[0]);
LCD_DisplayStringLine(Line3,Buf);
memset(Buf,0,20*sizeof(uint8_t));
/* 使下一行仍为默认颜色 */
LCD_SetBackColor(Blue);
一两个字符高亮
单个字节高亮
void highlight(u16 Linex, uint8_t *str, uint8_t pos)
{
int i = 0;
for(i = 0; i <= 19; i++)
{
if(i != pos)
LCD_DisplayChar(Linex, (320 - (16 * i)), str[i]);
}
LCD_SetBackColor(Yellow);
LCD_DisplayChar(Linex, (320 - (16 * pos)), str[pos]);
LCD_SetBackColor(Blue);
}
使用
//LCD_Disp
sprintf((char*)Buf," Threshold 1: %02ucm ", Threshold_Buf[0]);
if(lcd_light == 1)highlight(Line3, Buf, 16);
else LCD_DisplayStringLine(Line3, Buf);
memset(Buf,0,20*sizeof(uint8_t));
多个字节高亮
//自己加参数,想高亮几个就高亮几个。
void highlight(u16 Linex, u8* buf, u16 num1, u16 num2, u16 num3)
{
int i;
for (i = 0; i<=19; i++)
{
if ((i != num1) && (i != num2) && (i != num3))
{
LCD_DisplayChar(Linex, (320 - 16 * i), buf[i]);
}
}
LCD_SetBackColor(Red);
LCD_DisplayChar(Linex, (320 - 16 * num1), buf[num1]);
LCD_DisplayChar(Linex, (320 - 16 * num2), buf[num2]);
LCD_DisplayChar(Linex, (320 - 16 * num3), buf[num3]);
LCD_SetBackColor(Black);
}
使用
//LCD_Disp
sprintf((char*)Buf," Threshold 1: %02ucm ",Threshold_Buf[0]);
if(lcd_light == 0)highlight(Line3, Buf, 10, 11, 12);
else LCD_DisplayStringLine(Line3, Buf);
memset(Buf,0,20*sizeof(uint8_t));
行闪烁
//原理就是下面LED_Toggle函数那里。
void Lcd_Toggle(u16 Linex, u8 *buf, u16 time, u16 num)
{
int i;
for (i = 0; i < num; i++)
{
LCD_DisplayStringLine(Linex, buf);
Delay_Ms(time / num / 2);
LCD_ClearLine(Linex);
Delay_Ms(time / num / 2);
}
}
使用
sprintf((char *) lcd_buf, "TIM3Freq1 = %d ", TIM3Freq1);
if (lcd_flag == 3)
{
Lcd_Toggle(Line5, lcd_buf, 2000, 6);
lcd_flag = 0;
}
else LCD_DisplayStringLine(Line5, lcd_buf);
memset(lcd_buf, 0, 20 * sizeof(u8));
LCD_SetBackColor(Blue);
LED
display函数
void Led_Disp(u16 Ledx,FunctionalState NewState){
if(NewState == ENABLE){
GPIO_ResetBits(GPIOC,Ledx << 8);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
else{
GPIO_SetBits(GPIOC,Ledx << 8);
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
}
void Led_Toggle(u16 Ledx){
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIOC->ODR ^= (Ledx << 8);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
注意:为了解决与LCD的冲突问题,需要改变lcd.c里的三个函数——

在这三个函数的开头加上——
u16 pcout = GPIOC->ODR; // 先把GPIOC的ODR寄存器读取出来
结尾加上——
GPIOC->ODR = pcout; // 操作完LCD后,再将GPIOC的ODR寄存器原来的值恢复,即不改变LED的状态
记得在LED_Init()函数中关掉所有LED。
Toggle函数——LED闪烁
void Led_Toggle(u16 Ledx){//led.c
GPIO_SetBits(GPIOD,GPIO_Pin_2);
GPIOC->ODR ^= (Ledx << 8);
GPIO_ResetBits(GPIOD,GPIO_Pin_2);
}
void Led_Toggle_Disp(u16 Ledx,u16 Toggle_Time_ms,u16 num){//main.c
//Toggle_Time_ms总时长,如1000ms即1s
//num 闪烁几次
//亮灭周期为 Toggle_Time_ms/num/2
int i = 0;
for(i = 0;i < 2 * num;i ++){
Delay_Ms(Toggle_Time_ms/num/2);
Led_Toggle(Ledx);
}
}
下次写LED闪烁可以直接用这个。
Time_Base
中断服务函数
void TIM4_IRQHandler(void)
{
static u16 buzzer_count=0; //定义为静态变量
if (TIM_GetITStatus(TIM4,TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
buzzer_count++;
if(buzzer_count==500)
{
buzzer_count = 0;
buzzer_flag =1;
}
}
}
注意: 要检测是否进入中断,以及清零标志位。
改变状态值的相关计数值,最好用static写在中断函数里面。
Buzzer
使能
/****************************************************************************
* 函数名: Buzzer_Ctrl()
* 功 能: 控制蜂鸣器
* 输 入: FunctionalState NewState,判断使能还是失能
* 输 出: 无
*/
void Buzzer_Ctrl(FunctionalState NewState)
{
if (NewState != ENABLE)
{
GPIO_SetBits(GPIOB,GPIO_Pin_4);
}
else
{
GPIO_ResetBits(GPIOB,GPIO_Pin_4);
}
}
注意: 让蜂鸣器响,是清零;让蜂鸣器安静,是置一。
配置GPIO
蜂鸣器的引脚是接到PB4的,而默认的情况下,PB4的功能是JNTRST,所以我们要把他重映射为GPIO引脚,同时需要注意,还要使能AFIO功能的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_NoJTRST,ENABLE);
注意:在初始化GPIO的时候一定要细心.
GPIO_PinRemapConfig(GPIO_Remap_SWJ_NoJTRST,ENABLE);
注意, 这里是ENABLE;
KEY
变量调用
KEY的相关变量可以定义在.c文件中,然后在.h文件中声明。
然后main.c文件中,只要包含.h文件就能直接使用该变量。
注意宏定义运算表达式
调用时一定要加括号,不然运算顺序可能和你想得不一样。
Scan函数
uint8_t Key_Scan(void)
{
uint8_t Key_Val = 0;
if (~GPIO_ReadInputData(GPIOA) & 0x101)
{
Delay_Key(10);
if (!GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_0))
return 1;
else if (!GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_8))
return 2;
}
else if (~GPIO_ReadInputData(GPIOB) & 0x06)
{
Delay_Key(10);
if (!GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_1))
Key_Val = 3;
else if (!GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_2))
Key_Val = 4;
}
return Key_Val;
}
void Delay_Key(u16 ms)
{
int i, j;
for(i = 0; i<ms; i++)
for(j = 0; j<7992; j++);//72MHz
}
注意取反和延时;
注意是 GPIO_ReadInputData;
Disp函数
只考虑短按(单击)
void Key_Disp(void)
{
static uint8_t Key_Val = 0;
static uint8_t Key_Down = 0;
static uint8_t Key_Old = 0;
Key_Val = Key_Scan();
Key_Down = Key_Val & (Key_Val ^ Key_Old);
Key_Old = Key_Val;
switch (Key_Down)
{
case 1:lcd_count++;break;
case 2:lcd_count++;break;
case 3:lcd_count++;break;
case 4:lcd_count++;break;
}
}
注意:一定要记得加上static,不然会运行多次。
考虑长短按
void Key_Disp(void)
{
static uint8_t Key_Val = 0;//键值
static uint8_t Key_Down = 0;//当前键值
static uint8_t Key_Old = 0;//上一次键值
static u16 Key1_time = 0;//B1按下时间
static uint8_t key1_flag = 1;//B1长按标志位
Key_Val = Key_Scan();
Key_Down = Key_Val & (Key_Val ^ Key_Old);
Key_Old = Key_Val;
if (Key_Old == 1)//当按下B1
{
Key1_time += 10;//开始计数,这个具体时间不清楚,按道理是每次10ms
if (Key1_time>150 && key1_flag == 1)
{
lcd_count += 10;
Key1_time = 0;
key1_flag = 0;
}
}
if (Key_Down == 0 && Key_Old == 0)//按键松开
{
//这个短按上限时间最好小于长按判断时间,不然长按完,还会触发一次短按,
//同时要注意短按的检测时间,若写0-50,则短按就检测不到了,50-150之间是不会进行操作的
if (Key1_time>0 && Key1_time<100)
{
lcd_count++;
}
//恢复B1相关标志位
Key1_time = 0;
key1_flag = 1;
}
}
E2PROM
参考博客:蓝桥杯嵌入式_STM32 学习_IIC。
掉电不丢失
uint8_t IIC_flag = 0xdd;//标志位的写入数据
uint8_t IIC_Flag = 0;//标志位的读取数据
uint8_t Threshold_Buf[3] = {0};//数据的读取数据
uint8_t IIC_Buf[3] = {30,50,70};//数据的写入数据
//写main.c里
E2PROM_Read_long(&IIC_Flag,0x10,1);
if(IIC_Flag == 0xdd){
E2PROM_Read_long(Threshold_Buf, 0x00, 3);
}
else{
E2PROM_Write_long(&IIC_flag, 0x10, 1);
Delay_Ms(200);
E2PROM_Write_long(IIC_Buf, 0x00, 3);
Delay_Ms(200);
E2PROM_Read_long(Threshold_Buf, 0x00, 3);
}
在别的地址写入一个值作为标志位,每次重启先判断标志位是否是我们写入的值:
如果是,那么就直接读取我们在指定位置写入的数据;如果不是,那我们就写入标志位数据,以及我们自己运行的变量数据。
注意:写入标志位的值要用十六进制,因为一个地址是八位。
写入数据函数

(图片来源:AT24C02.pdf)
/*******************************************************************************
* 函数名 :E2PROM_Write_long
* 输入值 :unsigned char *pucBuf,unsigned char ucAddr,unsigned char ucNum
* 返回值 :none
* 功能描述:连续写入多个数据
* 备注 :pucBuf为源数据指针,ucAddr为E2PROM中要写入的数据起始地址,ucNum为写入数据的个数。
*******************************************************************************/
void E2PROM_Write_long(unsigned char* pucBuf, unsigned char ucAddr,
unsigned char ucNum)
{
I2CStart(); //起始信号
I2CSendByte(0xa0); //器件地址
I2CWaitAck(); //等待应答
I2CSendByte(ucAddr); //数据地址
I2CWaitAck();//等待应答
while(ucNum--)//写入个数
{
I2CSendByte(*pucBuf++);//写入数据
I2CWaitAck(); //等待应答
}
I2CStop();//停止信号
delay1(500);
}
读取多个数据

(图片来源:AT24C02.pdf)
/*******************************************************************************
* 函数名 :E2PROM_Read_long
* 输入值 :unsigned char *pucBuf,unsigned char ucAddr,unsigned char ucNum
* 返回值 :none
* 功能描述:连续读取多字节数据
* 备注 :pucBuf为存储数组指针,ucAddr为E2PROM中要读取的数据起始地址,ucNum为读取数据的个数。
*******************************************************************************/
void E2PROM_Read_long(unsigned char* pucBuf, unsigned char ucAddr,
unsigned char ucNum)
{
I2CStart(); //起始信号
I2CSendByte(0xa0);//器件地址 - 写
I2CWaitAck(); //等待应答
I2CSendByte(ucAddr);//数据地址
I2CWaitAck(); //等待应答
I2CStart();//起始信号
I2CSendByte(0xa1); //器件地址 - 读
I2CWaitAck();//等待应答
while(ucNum--)//读取个数
{
*pucBuf++ = I2CReceiveByte();//读取数据
if(ucNum)//判断是否继续读取
I2CSendAck();//发送有效应答
else
I2CSendNotAck();//发送无效应答
}
I2CStop();//停止信号
}
多类型读写
EEPROM一个地址,存入一个字节的数据,所以当数据范围小于256时,尽量用uint8_t类型;若大于256,则针对不同类型的数据,需要分离成单个字节的数据。
但分离字节有点麻烦。
所以我们可以用共用体来写——
//利用共用体读写EEPROM
union eeprom_dat
{
uint8_t t1;
uint16_t t2;
uint32_t t3;
int16_t t4;
float f1;
double f2;
unsigned char str[20];
}eeprom_dat_write,eeprom_dat_read;
//main.c文件中
i2c_init(); //I2C总线初始化
/*字符串读写*/
strcpy((char *)eeprom_dat_write.str, "Hello World!!!");
E2PROM_Write_long(eeprom_dat_write.str, 0x10, strlen((char *)eeprom_dat_write.str));
Delay_Ms(200);
E2PROM_Read_long(eeprom_dat_read.str, 0x10, strlen((char *)eeprom_dat_write.str));
Delay_Ms(200);
sprintf((char*)lcd_string,"%s ", eeprom_dat_read.str);
LCD_DisplayStringLine(Line4, (unsigned char *)lcd_string);
/*浮点型读写*/
eeprom_dat_write.f2 = 3.1415926535;
E2PROM_Write_long(eeprom_dat_write.str, 0x20, sizeof(eeprom_dat_write.f2));
Delay_Ms(200);
E2PROM_Read_long(eeprom_dat_read.str, 0x20, sizeof(eeprom_dat_write.f2));
Delay_Ms(200);
sprintf((char*)lcd_string,"%f ",eeprom_dat_read.f2);
LCD_DisplayStringLine(Line5,(unsigned char *)lcd_string);
注意:字符串用strlen,其他用sizeof。
(字符串自带结尾空格,strlen计数不加空格,sizeof计数加空格)
注意加上强制转换。
记得共用体是分号。
注意
(1) 自己完成读写EEPROM的函数,I2C驱动比赛提供;
(2) 两次数据写入间隔为:5ms;
(3) 赛题指定初值时:在程序初始化时预先写入数值,再屏蔽掉该函数;
(4) 不要在while(1)频繁读写EEPROM,AT24C02写的寿命为100w次。如果5ms写入一次,500分钟就把EEPROM写坏了。
(参考:电子设计工坊)
注意:
写地址是0xa0,读地址是0xa1;
初始化函数别忘写了!
起始函数该写的地方都加上!!!
一定要记得在main函数里调用初始化函数!!!!
RTC
快速配置
在比赛提供的 V3.5 库的 “Project->STM32F10x_StdPeriph_Examples->RTC->LSI_Calib” 文件夹下,打开 “main.c”:

直接复制粘贴 RTC_Configuration () 部分,去掉最后两句代码,加上我们的计数值设定即可。
RTC_SetCounter () 和 RTC_GetCounter () 可以在库函数文件 “stm32f10x_rtc.h” 里找到。
记得加上中断设置。
u32 Time=23*3600+50*60+10;//写为rtc.c里的全局变量
/*Init函数内容*/
NVIC_InitTypeDef NVIC_InitStructure;
//使能RTC中断
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//加上这一句就行,设置初始时间
//RTC_SetCounter(3600 * HH + 60 * MM + SS);
RTC_SetCounter(Time);
注意:u32 Time要是u32类型的,u16会出错。
在相同目录下,打开 “stm32f10x_it.c” 还可以看到 RTC 中断函数相关代码,修改修改直接使用即可:

void RTC_IRQHandler(void)
{
if (RTC_GetITStatus(RTC_IT_SEC) != RESET)
{
RTC_Time = RTC_GetCounter();
if (RTC_Time == 86400)//到24点清零
{
RTC_Time = 0;//当前秒的值
RTC_SetCounter(1);//下一秒的值
RTC_WaitForLastTask();//这个一定要加,不然会出错
}
/* Clear Interrupt pending bit */
RTC_ClearITPendingBit(RTC_FLAG_SEC);
}
}
//main.c函数调用
#include "rtc.h"
void window()
{
u8 str[20];
Time = RTC_GetCounter();
sprintf(str1,"%0.2d-%0.2d-%0.2d",Time/3600,(Time%3600)/60,(Time%3600)%60);
LCD_DisplayStringLine(Line2, str);
}
int main()
{
...
rtc_Init();
while(1)
{
window();
delay_ms(300);
}
}
ADC
注意的点
1、GPIO管脚是PB0,通道8;
2、分频系数是6:RCC_PCLK2_Div6;
3、sprintf((char*)lcd_buf, "ADC_val : %.2f ", ADC_val/4095.0f*3.3f);
if (ADC_flag)
{
ADC_flag = 0;
ADC_val = ADC_GetConversionValue(ADC1);//这个函数在ADC库函数里
}
PWM
定时器通道引脚分布图表

输出两路频率固定占空比可调的 PWM----文件名:PWM_Output
快速配置
在比赛提供的 V3.5 库的 “Project->STM32F10x_StdPeriph_Examples->TIM->PWM_Output” 文件夹下,打开 “main.c”:
(注意,不是7PWM_Output)


上面的根据自己的需求修改就行。
设置占空比
void PWM1_ctrl(u16 cycle, u16 ch2_duty, u16 ch3_duty)
{
TIM_SetAutoreload(TIM2, cycle);//周期@1us
TIM_SetCompare2(TIM2,ch2_duty / 100.0f * fq);//占空比
TIM_SetCompare3(TIM2,ch3_duty / 100.0f * fq);//占空比
}
周期与频率换算方法:
设置定时器为72分频,则计数一次为us.
周期与频率互为倒数,将已知频率求倒数再乘上10的六次方us,即一秒,即可得到周期。
使用方法
#include "pwm_1.h"
//main.c里——
PWM1_Init();
PWM1_ctrl(1000, 30, 60);//周期都为1000us,即频率都为1000Hz,占空比一个30%,一个60%
输出两路频率可调占空比可调的 PWM----文件名:OCToggle
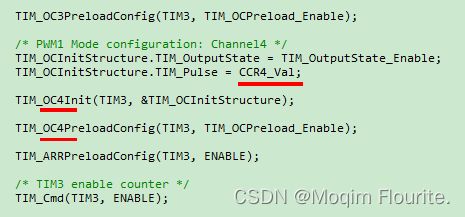
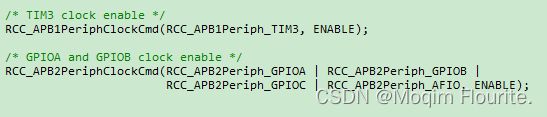
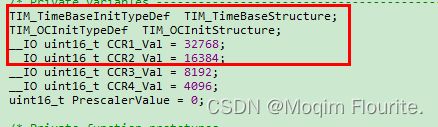
快速配置
在比赛提供的 V3.5 库的 “Project->STM32F10x_StdPeriph_Examples->TIM->OCToggle” 文件夹下,打开 “main.c”:

预分频值设置为71.

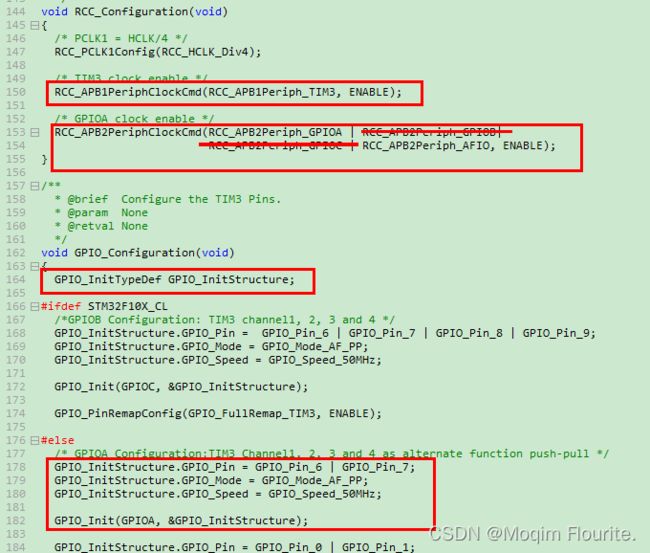
基本上比较输出的设置代码都在这里,更改相应的引脚和通道就可以。
再打开同目录下的 “stm32f10x_it.h”:

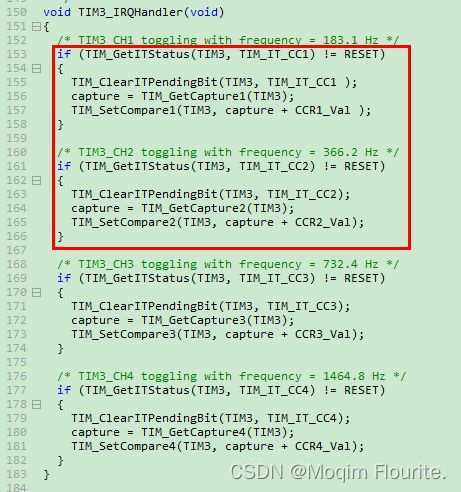
这里中断服务函数已经有了输出相应频率的代码,
我们对中断服务函数进行扩充增加占空比部分即可——
uint16_t capture = 0;
u8 pa6_state=0,pa7_state=0;
void TIM3_IRQHandler(void)
{
/* TIM3_CH1 toggling with frequency = 183.1 Hz */
if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1 );
capture = TIM_GetCapture1(TIM3);
if (pa6_state==0)
{
TIM_SetCompare1(TIM3, capture + (u16)CCR1_Val * duty1 );
pa6_state = 1;
}
else
{
TIM_SetCompare1(TIM3, capture + (u16)CCR1_Val * (1 - duty1) );
pa6_state = 0;
}
}
/* TIM3_CH2 toggling with frequency = 366.2 Hz */
if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
capture = TIM_GetCapture2(TIM3);
if (pa7_state==0)
{
TIM_SetCompare2(TIM3, capture + (u16)CCR2_Val * duty2 );
pa7_state = 1;
}
else
{
TIM_SetCompare2(TIM3, capture + (u16)CCR2_Val * (1 - duty2) );
pa7_state = 0;
}
}
}
使用方法
CCR1_Val是周期;
duty1是占空比,设置时记得为float类型的小数;
pa6_state是为了产生方波;
所有变量都定义在PWM.c文件里即可,需要改变的值如CCR1_Val和duty1在头文件用extern声明就行,然后用按键什么的改变这些参数即可。
注意:
PA6是CH1通道,写代码要与CCR1_Val、TIM_OC1Init()、TIM_OC1PreloadConfig()、TIM_IT_CC1、TIM_GetCapture1()、TIM_SetCompare1()对应,不要CH1用到了CH2的参数或者库函数。
当发现波形不是你想要的答案时,除了参数的数据设置要注意,这个参数与库函数的对应关系也要注意。
捕获一路PWM的频率和占空比----文件名:PWM_Input
快速配置
在比赛提供的 V3.5 库的 “Project\STM32F10x_StdPeriph_Examples\TIM*PWM_Input* 文件夹下,打开 “main.c”:

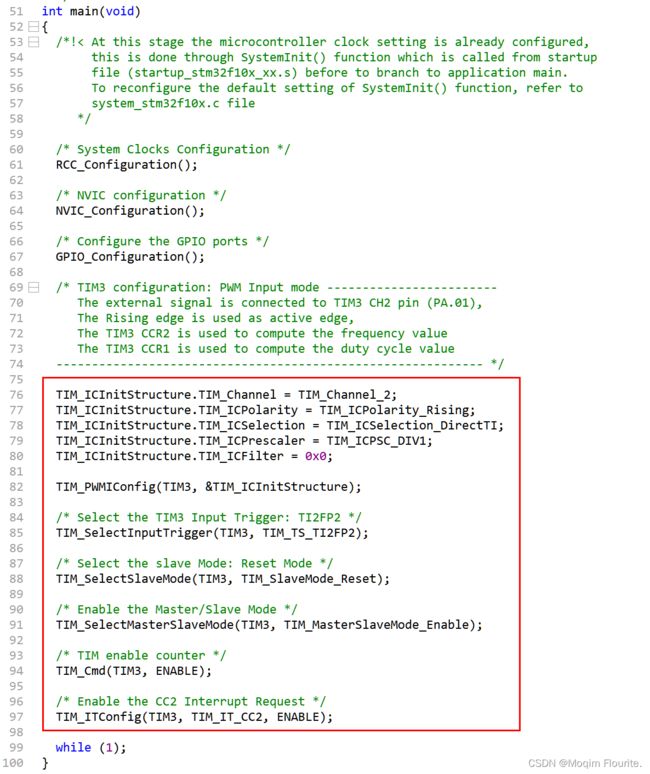
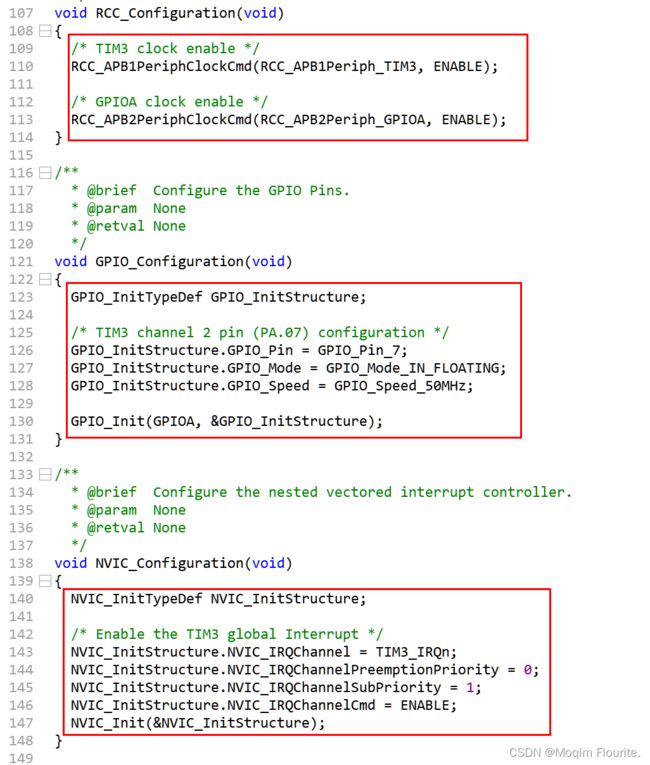
基本上比较输出的设置代码都在这里,更改相应的引脚和通道就可以。
再打开同目录下的"stm32f10x_it.h”:
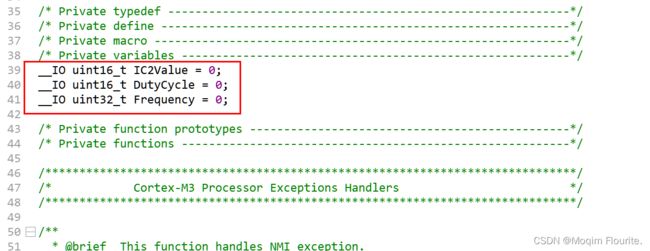

使用方法
IC2Value是比较值;//别问什么是比较值,我也不知道,只是应该是这个意思。。。
DutyCycle是占空比,直接是u16类型的;
Frequency是频率;
所有变量都定义在pwm_ic.c文件里即可,需要获取的值如DutyCycle和Frequency在头文件用extern声明就行,然后用LCD显示即可。
注意:
1、注意通道一致,不要CH1用到了CH2的参数或者库函数;
2、中断服务函数中,两个画线的地方需要注意,获取的频率是用设置的通道相对应的库函数,比较值是用另一个通道的库函数,两者必须不同,否则不能实现占空比和频率的获取。
捕获两路PWM的频率和占空比
思路
直接用上面捕获一路的代码复制两遍,然后用滴答定时器中设置一个flag来实现不同时间段分别采样,这样就不会有冲突。
代码
//pwm_ic.c
#include "pwm_ic.h"
void PWM_IC_Init_6(void)
{
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the TIM3 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* TIM3 channel 2 pin (PA.07) configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* GPIOA clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
/* Select the slave Mode: Reset Mode */
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
/* Enable the Master/Slave Mode */
TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable);
/* TIM enable counter */
TIM_Cmd(TIM3, ENABLE);
/* Enable the CC2 Interrupt Request */
TIM_ITConfig(TIM3,TIM_IT_CC1, ENABLE);
}
void PWM_IC_Init_7(void)
{
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* Enable the TIM3 global Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* TIM3 channel 2 pin (PA.07) configuration */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* GPIOA clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);
TIM_SelectInputTrigger(TIM3, TIM_TS_TI2FP2);
/* Select the slave Mode: Reset Mode */
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
/* Enable the Master/Slave Mode */
TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable);
/* TIM enable counter */
TIM_Cmd(TIM3, ENABLE);
/* Enable the CC2 Interrupt Request */
TIM_ITConfig(TIM3,TIM_IT_CC2, ENABLE);
}
__IO uint16_t IC2Value1 = 0;
__IO uint16_t DutyCycle1 = 0;
__IO uint32_t Frequency1 = 0;
__IO uint16_t IC2Value2 = 0;
__IO uint16_t DutyCycle2 = 0;
__IO uint32_t Frequency2 = 0;
void TIM3_IRQHandler(void)
{
/* Clear TIM3 Capture compare interrupt pending bit */
if (TIM_GetITStatus(TIM3, TIM_IT_CC2))
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
/* Get the Input Capture value */
IC2Value2 = TIM_GetCapture2(TIM3);
if (IC2Value2 != 0)
{
/* Duty cycle computation */
DutyCycle2 = (TIM_GetCapture1(TIM3) * 100) / IC2Value2;
/* Frequency computation */
Frequency2 = SystemCoreClock / IC2Value2;
}
else
{
DutyCycle2 = 0;
Frequency2 = 0;
}
}
/* Clear TIM3 Capture compare interrupt pending bit */
if (TIM_GetITStatus(TIM3, TIM_IT_CC1))
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1);
/* Get the Input Capture value */
IC2Value1 = TIM_GetCapture1(TIM3);
if (IC2Value1 != 0)
{
/* Duty cycle computation */
DutyCycle1 = (TIM_GetCapture2(TIM3) * 100) / IC2Value1;
/* Frequency computation */
Frequency1 = SystemCoreClock / IC2Value1;
}
else
{
DutyCycle1 = 0;
Frequency1 = 0;
}
}
}
//main.c
if (PWM_IC_flag)
{
PWM_IC_Init_6();
TIM_ITConfig(TIM3, TIM_IT_CC2, DISABLE);
}
else
{
PWM_IC_Init_7();
TIM_ITConfig(TIM3, TIM_IT_CC1, DISABLE);
}
//stm32f10x.it.c
extern u8 PWM_IC_flag;
void SysTick_Handler(void)
{
static __IO u32 t = 0;
TimingDelay--;
if (t ++ == 100)
{
PWM_IC_flag ^= 1;
t = 0;
}
}
串口与TIM2冲突问题
#define PWM_ENABLE 1
#define UART_ENABLE 2
void PWM_UART_Enable(u8 flag)
{
if(flag==PWM_ENABLE)
{
USART_Cmd(USART2, DISABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, DISABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
if(flag==UART_ENABLE)
{
TIM_Cmd(TIM2, DISABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, DISABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
USART_Cmd(USART2, ENABLE);
}
}
串口
基本知识
管脚: GPIOA2、GPIOA3; PA2是复用推挽输出,PA3是浮空输入;
时钟: USART2是APB1总线;记得开复用时钟;
使用
// 发送字符
unsigned char USART_SendChar(USART_TypeDef* USARTx, unsigned char ucChar)
{
USART_SendData(USARTx, ucChar);
while(!USART_GetFlagStatus(USARTx, USART_FLAG_TXE));//USART_FLAG_TC 表示传输完毕;USART_FLAG_TXE表示发送缓冲区空
return ucChar;
}
// 发送字符串
void USART_SendString(USART_TypeDef* USARTx, unsigned char* pucStr)
{
while(*pucStr != '\0')
USART_SendChar(USARTx, *pucStr++);
}
void USART2_IRQHandler(void){
if(USART_GetITStatus(USART2,USART_IT_RXNE)){
RxOver = 1;
Uart_Buf = USART_ReceiveData(USART2);
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
}
}
闲时判断
在串口中断服务函数加上一个时间标志位,当触发串口中断就将其清零。
在定时器里用此标志位计数,当增加到一定数量时,清空串口缓冲数组。
void USART2_IRQHandler(void)
{
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
//使用函数内容
rx_ideltime=0;//一个时间标志位
}
}
//定时器闲时判断
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4,TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
rx_ideltime++;
if(rx_ideltime>=50)
{
rx_ideltime=0;
rx_count=0;
memset(rx_buf,0,15);
}
}
}
善用状态
用一个标志来作为状态切换触发;
例如,输入一个ABCD-1234-A2C4
那么,可以将’-'作为状态切换的契机,每四位数据作为一组状态——
extern uint8_t RxOver;
extern uint8_t Uart_Buf[5];
extern uint8_t Uart_flag1[5];
extern uint8_t Uart_flag2[5];
extern uint8_t Uart_flag3[5];
void USART2_IRQHandler(void){
static uint8_t temp;
static uint8_t t = 0;
static uint8_t k_state = 0;
if(USART_GetITStatus(USART2,USART_IT_RXNE)){
RxOver = 1;
temp = USART_ReceiveData(USART2);
if (temp != '-')
{
switch (k_state)
{
case 0:Uart_Buf[t] = temp;break;
case 1:
{
if(strcmp((char*)Uart_Buf,(char*)Uart_flag1) != 0)
k_state = 0;
}break;
case 2:
{
if(strcmp((char*)Uart_Buf,(char*)Uart_flag2) != 0)
k_state = 0;
}break;
case 3:
{
strcpy(目标数组,(char*)Uart_Buf);
RxOver = 1;
k_state = 0;
}break;
}
if(++t == 4){t = 0;k_state++;}
}
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
}
}
当三个标志都需要存储,可以用一个一维数组来当缓冲区,每次判断正确都存入缓冲区,当全部都符合标准,则将缓冲区内的数据存入目标数组。
若有一次不符合,则清零状态,同时清空缓冲区。
C语言知识点
字符与字符串
字符之间判断可以直接写——
if(num_buf[0] != '@')num_buf[0] ++;
字符串直接必须用相对应的函数才行——
strcpy 复制
char*strcpy(char *dest, const char *src)
后者拷贝给前者,结尾空格也会拷贝,要注意分配空间。
strcmp 比较
int strcmp(const char *s1, const char *s2);
strcmp比较两个字符串的大小,一个字符一个字符比较,按ASCII码比较
标准规定:
第一个字符串大于第二个字符串,则返回大于0的数字;
第一个字符串等于第二个字符串,则返回0;
第一个字符串小于第二个字符串,则返回小于0的数字。
注意,比较双方的数组都要留一个空格位才行,不然会出错。
如——
uint8_t str1[4] = {'1', '2', '3'};
uint8_t str2[4] = {'1', '2', '3'};
uint8_t str3[4] = {'4', '2', '3'};
strcmp((char*)str1, (char*)str2);
strcmp((char*)str1, (char*)str3);
strlen 取长度(不包括结尾’\0’)
size_t strlen(const char *str)
注意size_t 是无符号整形。
strcat 追加拷贝
char *strcat(char *dest,char *src)
将后面的字符串加到前面的字符串的最后。
注意
这些函数的参数都是char*类型的,要使用强制转换。
提取字符串
// 从字符串中提取车辆信息
void get_car_info(char *str, pCar_t pcar)
{
int i = 0, count = 0;
//提取车辆类型
for(i = 0; i < 4; i++, count++)
pcar->type[i] = str[count];
//提取车辆ID
count++;
for(i = 0; i < 4; i++, count++)
pcar->id[i] = str[count];
//取车辆录入时间
count++;
for(i = 0; i < 12; i++, count++)
pcar->time[i] = str[count];
/*
printf("pCar_t->type = %s\r\n", pcar->type);
printf("pCar_t->id = %s\r\n", pcar->id);
printf("pCar_t->time = %s\r\n", pcar->time);
*/
}