Pytorch葵花宝典(建议收藏)
目录
前言
一、基本配置
1.导入包和版本查询:
2.可复现性
3.显卡设置
二、张量(Tensor)处理
1.张量的数据类型
2.张量基本信息
3.命名张量
4.数据类型转换
5.张量形变
6.打乱顺序
7.复制张量
三、模型定义和操作
1.一个简单两层卷积网络的示例
2.双线性汇合(bilinear pooling)
3.多卡同步 BN(Batch normalization)
4.将已有网络的所有BN层改为同步BN层
5.类似 BN 滑动平均
6.查看网络中的参数
7.模型权重初始化
四、数据处理
1.计算数据集的均值和标准差
2.常用训练和验证数据预处理
五、模型训练和测试
1.分类模型训练代码
2.分类模型测试代码
3.自定义loss
4.标签平滑(label smoothing)
5.模型训练可视化
6.保存与加载断点
六、其他注意事项
前言
本文对Pytorch常用的代码段进行了整理,祝你代码写起来事半功倍,值得收藏,欢迎传阅!
总共分为6个部分,基本涵盖了Pytorch的常规操作:

一、基本配置
1.导入包和版本查询:
import torch
import torch.nn as nn
import torchvision
print(torch.__version__)
print(torch.version.cuda)#cuda版本查询
print(torch.backends.cudnn.version())#cudnn版本查询
print(torch.cuda.get_device_name(0))#设备名2.可复现性
在硬件设备(CPU、GPU)不同时,完全的可复现性无法保证,即使随机种子相同。但是,在同一个设备上,应该保证可复现性。具体做法是,在程序开始的时候固定torch的随机种子,同时也把numpy的随机种子固定。
np.random.seed(0)
torch.manual_seed(0)#为CPU设置种子用于生成随机数,以使得结果是确定的
torch.cuda.manual_seed_all(0)#为所有的GPU设置种子,以使得结果是确定的
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False解释一下:torch.backends.cudnn.benchmark = true
总的来说,大部分情况下,设置这个 flag 可以让内置的 cuDNN 的 auto-tuner 自动寻找最适合当前配置的高效算法,来达到优化运行效率的问题。
一般来讲,应该遵循以下准则:
-
如果网络的输入数据维度或类型上变化不大,设置 torch.backends.cudnn.benchmark = true 可以增加运行效率;
-
如果网络的输入数据在每次 iteration 都变化的话,会导致 cnDNN 每次都会去寻找一遍最优配置,这样反而会降低运行效率。
torch.backends.cudnn.deterministic是啥?顾名思义,将这个 flag 置为True的话,每次返回的卷积算法将是确定的,即默认算法。如果配合上设置 Torch 的随机种子为固定值的话,应该可以保证每次运行网络的时候相同输入的输出是固定的。
3.显卡设置
如果只需要一张显卡:
# Device configuration
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')如果需要指定多张显卡,比如0,1号显卡:
import os
os.environ['CUDA_VISIBLE_DEVICES'] = '0,1'也可以在命令行运行代码时设置显卡:
CUDA_VISIBLE_DEVICES=0,1 python train.py清除显存
torch.cuda.empty_cache()也可以使用在命令行重置GPU的指令
nvidia-smi --gpu-reset -i [gpu_id]二、张量(Tensor)处理
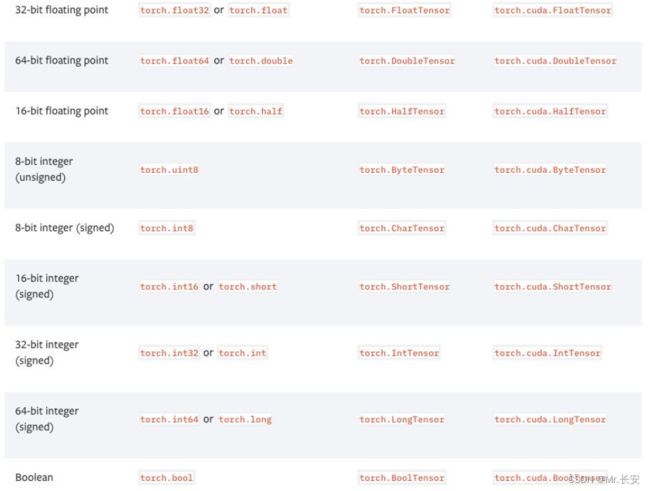
1.张量的数据类型
PyTorch有9种CPU张量类型和9种GPU张量类型:
2.张量基本信息
tensor = torch.randn(3,4,5)
print(tensor.type()) # 数据类型
print(tensor.size()) # 张量的shape,是个元组
print(tensor.dim()) # 维度的数量3.命名张量
张量命名是一个非常有用的方法,这样可以方便地使用维度的名字来做索引或其他操作,大大提高了可读性、易用性,防止出错。
# 在PyTorch 1.3之前,需要使用注释
# Tensor[N, C, H, W]
images = torch.randn(32, 3, 56, 56)
images.sum(dim=1)
images.select(dim=1, index=0)
# PyTorch 1.3之后
NCHW = [‘N’, ‘C’, ‘H’, ‘W’]
images = torch.randn(32, 3, 56, 56, names=NCHW)
images.sum('C')
images.select('C', index=0)
# 也可以这么设置
tensor = torch.rand(3,4,1,2,names=('C', 'N', 'H', 'W'))
# 使用align_to可以对维度方便地排序
tensor = tensor.align_to('N', 'C', 'H', 'W')4.数据类型转换
# 设置默认类型,pytorch中的FloatTensor远远快于DoubleTensor
torch.set_default_tensor_type(torch.FloatTensor)
# 类型转换
tensor = tensor.cuda()
tensor = tensor.cpu()
tensor = tensor.float()
tensor = tensor.long()5.张量形变
# 在将卷积层输入全连接层的情况下通常需要对张量做形变处理,
# 相比torch.view,torch.reshape可以自动处理输入张量不连续的情况。
tensor = torch.rand(2,3,4)
shape = (6, 4)
tensor = torch.reshape(tensor, shape)6.打乱顺序
tensor = tensor[torch.randperm(tensor.size(0))] # 打乱第一个维度7.复制张量
# Operation | New/Shared memory | Still in computation graph |
tensor.clone() # | New | Yes |
tensor.detach() # | Shared | No |
tensor.detach.clone()() # | New | No |三、模型定义和操作
1.一个简单两层卷积网络的示例
# convolutional neural network (2 convolutional layers)
class ConvNet(nn.Module):
def __init__(self, num_classes=10):
super(ConvNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(16),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.layer2 = nn.Sequential(
nn.Conv2d(16, 32, kernel_size=5, stride=1, padding=2),
nn.BatchNorm2d(32),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2))
self.fc = nn.Linear(7*7*32, num_classes)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
return out
model = ConvNet(num_classes).to(device)2.双线性汇合(bilinear pooling)
X = torch.reshape(N, D, H * W) # Assume X has shape N*D*H*W
X = torch.bmm(X, torch.transpose(X, 1, 2)) / (H * W) # Bilinear pooling
assert X.size() == (N, D, D)
X = torch.reshape(X, (N, D * D))
X = torch.sign(X) * torch.sqrt(torch.abs(X) + 1e-5) # Signed-sqrt normalization
X = torch.nn.functional.normalize(X) # L2 normalization3.多卡同步 BN(Batch normalization)
当使用 torch.nn.DataParallel 将代码运行在多张 GPU 卡上时,PyTorch 的 BN 层默认操作是各卡上数据独立地计算均值和标准差,同步 BN 使用所有卡上的数据一起计算 BN 层的均值和标准差,缓解了当批量大小(batch size)比较小时对均值和标准差估计不准的情况,是在目标检测等任务中一个有效的提升性能的技巧。
sync_bn = torch.nn.SyncBatchNorm(num_features, eps=1e-05, momentum=0.1, affine=True,
track_running_stats=True)4.将已有网络的所有BN层改为同步BN层
def convertBNtoSyncBN(module, process_group=None):
'''Recursively replace all BN layers to SyncBN layer.
Args:
module[torch.nn.Module]. Network
'''
if isinstance(module, torch.nn.modules.batchnorm._BatchNorm):
sync_bn = torch.nn.SyncBatchNorm(module.num_features, module.eps, module.momentum,
module.affine, module.track_running_stats, process_group)
sync_bn.running_mean = module.running_mean
sync_bn.running_var = module.running_var
if module.affine:
sync_bn.weight = module.weight.clone().detach()
sync_bn.bias = module.bias.clone().detach()
return sync_bn
else:
for name, child_module in module.named_children():
setattr(module, name) = convert_syncbn_model(child_module, process_group=process_group))
return moduleaffine定义了BN层的参数γ和β是否是可学习的(不可学习默认是常数1和0)。
5.类似 BN 滑动平均
如果要实现类似 BN 滑动平均的操作,在 forward 函数中要使用原地(inplace)操作给滑动平均赋值。
class BN(torch.nn.Module)
def __init__(self):
...
self.register_buffer('running_mean', torch.zeros(num_features))
def forward(self, X):
...
self.running_mean += momentum * (current - self.running_mean)6.查看网络中的参数
可以通过model.state_dict()或者model.named_parameters()函数查看现在的全部可训练参数(包括通过继承得到的父类中的参数)
params = list(model.named_parameters())
(name, param) = params[28]
print(name)
print(param.grad)
print('-------------------------------------------------')
(name2, param2) = params[29]
print(name2)
print(param2.grad)
print('----------------------------------------------------')
(name1, param1) = params[30]
print(name1)
print(param1.grad)7.模型权重初始化
注意 model.modules() 和 model.children() 的区别:model.modules() 会迭代地遍历模型的所有子层,而 model.children() 只会遍历模型下的一层。
# Common practise for initialization.
for layer in model.modules():
if isinstance(layer, torch.nn.Conv2d):
torch.nn.init.kaiming_normal_(layer.weight, mode='fan_out',
nonlinearity='relu')
if layer.bias is not None:
torch.nn.init.constant_(layer.bias, val=0.0)
elif isinstance(layer, torch.nn.BatchNorm2d):
torch.nn.init.constant_(layer.weight, val=1.0)
torch.nn.init.constant_(layer.bias, val=0.0)
elif isinstance(layer, torch.nn.Linear):
torch.nn.init.xavier_normal_(layer.weight)
if layer.bias is not None:
torch.nn.init.constant_(layer.bias, val=0.0)
# Initialization with given tensor.
layer.weight = torch.nn.Parameter(tensor)四、数据处理
1.计算数据集的均值和标准差
import os
import cv2
import numpy as np
from torch.utils.data import Dataset
from PIL import Image
def compute_mean_and_std(dataset):
# 输入PyTorch的dataset,输出均值和标准差
mean_r = 0
mean_g = 0
mean_b = 0
for img, _ in dataset:
img = np.asarray(img) # change PIL Image to numpy array
mean_b += np.mean(img[:, :, 0])
mean_g += np.mean(img[:, :, 1])
mean_r += np.mean(img[:, :, 2])
mean_b /= len(dataset)
mean_g /= len(dataset)
mean_r /= len(dataset)
diff_r = 0
diff_g = 0
diff_b = 0
N = 0
for img, _ in dataset:
img = np.asarray(img)
diff_b += np.sum(np.power(img[:, :, 0] - mean_b, 2))
diff_g += np.sum(np.power(img[:, :, 1] - mean_g, 2))
diff_r += np.sum(np.power(img[:, :, 2] - mean_r, 2))
N += np.prod(img[:, :, 0].shape)
std_b = np.sqrt(diff_b / N)
std_g = np.sqrt(diff_g / N)
std_r = np.sqrt(diff_r / N)
mean = (mean_b.item() / 255.0, mean_g.item() / 255.0, mean_r.item() / 255.0)
std = (std_b.item() / 255.0, std_g.item() / 255.0, std_r.item() / 255.0)
return mean, std2.常用训练和验证数据预处理
其中 ToTensor 操作会将 PIL.Image 或形状为 H×W×D,数值范围为 [0, 255] 的 np.ndarray 转换为形状为 D×H×W,数值范围为 [0.0, 1.0] 的 torch.Tensor。
train_transform = torchvision.transforms.Compose([
torchvision.transforms.RandomResizedCrop(size=224,
scale=(0.08, 1.0)),
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225)),
])
val_transform = torchvision.transforms.Compose([
torchvision.transforms.Resize(256),
torchvision.transforms.CenterCrop(224),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225)),
])五、模型训练和测试
1.分类模型训练代码
# Loss and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
# Train the model
total_step = len(train_loader)
for epoch in range(num_epochs):
for i ,(images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
# Forward pass
outputs = model(images)
loss = criterion(outputs, labels)
# Backward and optimizer
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 100 == 0:
print('Epoch: [{}/{}], Step: [{}/{}], Loss: {}'
.format(epoch+1, num_epochs, i+1, total_step, loss.item()))2.分类模型测试代码
# Test the model
model.eval() # eval mode(batch norm uses moving mean/variance
#instead of mini-batch mean/variance)
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Test accuracy of the model on the 10000 test images: {} %'
.format(100 * correct / total))3.自定义loss
继承torch.nn.Module类写自己的loss。
class MyLoss(torch.nn.Module):
def __init__(self):
super(MyLoss, self).__init__()
def forward(self, x, y):
loss = torch.mean((x - y) ** 2)
return loss4.标签平滑(label smoothing)
写一个label_smoothing.py的文件,然后在训练代码里引用,用LSR代替交叉熵损失即可。label_smoothing.py内容如下:
import torch
import torch.nn as nn
class LSR(nn.Module):
def __init__(self, e=0.1, reduction='mean'):
super().__init__()
self.log_softmax = nn.LogSoftmax(dim=1)
self.e = e
self.reduction = reduction
def _one_hot(self, labels, classes, value=1):
"""
Convert labels to one hot vectors
Args:
labels: torch tensor in format [label1, label2, label3, ...]
classes: int, number of classes
value: label value in one hot vector, default to 1
Returns:
return one hot format labels in shape [batchsize, classes]
"""
one_hot = torch.zeros(labels.size(0), classes)
#labels and value_added size must match
labels = labels.view(labels.size(0), -1)
value_added = torch.Tensor(labels.size(0), 1).fill_(value)
value_added = value_added.to(labels.device)
one_hot = one_hot.to(labels.device)
one_hot.scatter_add_(1, labels, value_added)
return one_hot
def _smooth_label(self, target, length, smooth_factor):
"""convert targets to one-hot format, and smooth
them.
Args:
target: target in form with [label1, label2, label_batchsize]
length: length of one-hot format(number of classes)
smooth_factor: smooth factor for label smooth
Returns:
smoothed labels in one hot format
"""
one_hot = self._one_hot(target, length, value=1 - smooth_factor)
one_hot += smooth_factor / (length - 1)
return one_hot.to(target.device)
def forward(self, x, target):
if x.size(0) != target.size(0):
raise ValueError('Expected input batchsize ({}) to match target batch_size({})'
.format(x.size(0), target.size(0)))
if x.dim() < 2:
raise ValueError('Expected input tensor to have least 2 dimensions(got {})'
.format(x.size(0)))
if x.dim() != 2:
raise ValueError('Only 2 dimension tensor are implemented, (got {})'
.format(x.size()))
smoothed_target = self._smooth_label(target, x.size(1), self.e)
x = self.log_softmax(x)
loss = torch.sum(- x * smoothed_target, dim=1)
if self.reduction == 'none':
return loss
elif self.reduction == 'sum':
return torch.sum(loss)
elif self.reduction == 'mean':
return torch.mean(loss)
else:
raise ValueError('unrecognized option, expect reduction to be one of none, mean, sum')5.模型训练可视化
PyTorch可以使用tensorboard来可视化训练过程。
安装和运行TensorBoard。
pip install tensorboard
tensorboard --logdir=runs使用SummaryWriter类来收集和可视化相应的数据,放了方便查看,可以使用不同的文件夹,比如'Loss/train'和'Loss/test'。
from torch.utils.tensorboard import SummaryWriter
import numpy as np
writer = SummaryWriter()
for n_iter in range(100):
writer.add_scalar('Loss/train', np.random.random(), n_iter)
writer.add_scalar('Loss/test', np.random.random(), n_iter)
writer.add_scalar('Accuracy/train', np.random.random(), n_iter)
writer.add_scalar('Accuracy/test', np.random.random(), n_iter)6.保存与加载断点
注意为了能够恢复训练,我们需要同时保存模型和优化器的状态,以及当前的训练轮数。
start_epoch = 0
# Load checkpoint.
if resume: # resume为参数,第一次训练时设为0,中断再训练时设为1
model_path = os.path.join('model', 'best_checkpoint.pth.tar')
assert os.path.isfile(model_path)
checkpoint = torch.load(model_path)
best_acc = checkpoint['best_acc']
start_epoch = checkpoint['epoch']
model.load_state_dict(checkpoint['model'])
optimizer.load_state_dict(checkpoint['optimizer'])
print('Load checkpoint at epoch {}.'.format(start_epoch))
print('Best accuracy so far {}.'.format(best_acc))
# Train the model
for epoch in range(start_epoch, num_epochs):
...
# Test the model
...
# save checkpoint
is_best = current_acc > best_acc
best_acc = max(current_acc, best_acc)
checkpoint = {
'best_acc': best_acc,
'epoch': epoch + 1,
'model': model.state_dict(),
'optimizer': optimizer.state_dict(),
}
model_path = os.path.join('model', 'checkpoint.pth.tar')
best_model_path = os.path.join('model', 'best_checkpoint.pth.tar')
torch.save(checkpoint, model_path)
if is_best:
shutil.copy(model_path, best_model_path)六、其他注意事项
-
不要使用太大的线性层。因为nn.Linear(m,n)使用的是O(m,n)的内存,线性层太大很容易超出现有显存。
-
不要在太长的序列上使用RNN。因为RNN反向传播使用的是BPTT算法,其需要的内存和输入序列的长度呈线性关系。
-
model(x) 前用 model.train() 和 model.eval() 切换网络状态。
-
不需要计算梯度的代码块用 with torch.no_grad() 包含起来。
-
model.eval() 和 torch.no_grad() 的区别在于,model.eval() 是将网络切换为测试状态,例如 BN 和dropout在训练和测试阶段使用不同的计算方法。torch.no_grad() 是关闭 PyTorch 张量的自动求导机制,以减少存储使用和加速计算,得到的结果无法进行 loss.backward()。
-
model.zero_grad()会把整个模型的参数的梯度都归零, 而optimizer.zero_grad()只会把传入其中的参数的梯度归零。
-
torch.nn.CrossEntropyLoss 的输入不需要经过 Softmax。torch.nn.CrossEntropyLoss 等价于 torch.nn.functional.log_softmax + torch.nn.NLLLoss。
-
loss.backward() 前用 optimizer.zero_grad() 清除累积梯度。
-
torch.utils.data.DataLoader 中尽量设置 pin_memory=True,对特别小的数据集如 MNIST 设置 pin_memory=False 反而更快一些。num_workers 的设置需要在实验中找到最快的取值。
-
用 del 及时删除不用的中间变量,节约 GPU 存储。
-
减少 CPU 和 GPU 之间的数据传输。 例如如果你想知道一个 epoch 中每个 mini-batch 的 loss 和准确率,先将它们累积在 GPU 中等一个 epoch 结束之后一起传输回 CPU 会比每个 mini-batch 都进行一次 GPU 到 CPU 的传输更快。
-
使用半精度浮点数 half() 会有一定的速度提升,具体效率依赖于 GPU 型号。需要小心数值精度过低带来的稳定性问题。
-
时常使用 assert tensor.size() == (N, D, H, W) 作为调试手段,确保张量维度和你设想中一致。
-
除了标记 y 外,尽量少使用一维张量,使用 n*1 的二维张量代替,可以避免一些意想不到的一维张量计算结果。