【嵌入式硬件芯片开发笔记】HART协议调制解调芯片AD5700配置流程
【嵌入式硬件芯片开发笔记】HART协议调制解调芯片AD5700配置流程
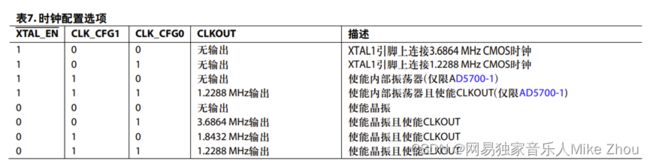
XTAL_EN接地,CLK_CFG的两个引脚由同一个GPIO控制
初始时HART_CLK_CFG输出低电平
由RTS引脚控制调制/解调。当RTS处于高电平时,为解调(输入);否则为调制(输出)。切换时,延时1ms
HART协议部分,符合HART物理层要求(修订版8.1)。
一个标准UART帧,该帧包含一个起始位、8位数据、一个奇偶校验和一个停止位
UART:1200波特率 1停止位 无校验 数据长度8
开始运行
- 检测HART_VDD,至少大于2.7V
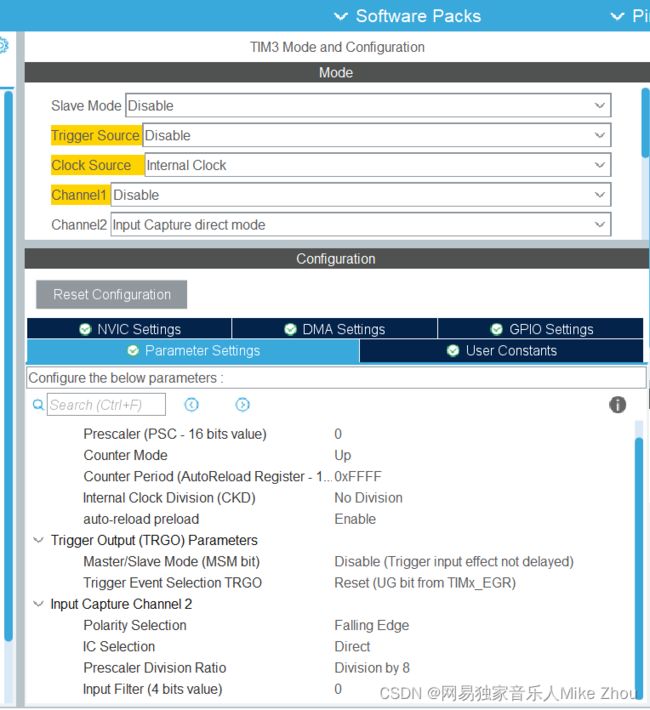
- 引脚HART_CLK_CFG初始时为低电平,拉高后CLKOUT输出1.2288MHz,用定时器进行捕获,计算频率是否达标
- 最后开启调制或解调
初始化 - 使能CFG引脚,进行时钟检测
- 采用定时器捕获的方式计算频率(计算速度不够则可能算不准)
- 关闭CFG引脚
- 解调模式接收数据
- 当串口接收中断发生时,解析命令并切换调制模式,返回数据
代码例程
uint8_t UART4_RxBuffer[256]={0};
uint8_t UART4_RxFlag=0;

/**
* @brief UART4 Initialization Function
* @param None
* @retval None
*/
static void MX_UART4_Init(void)
{
/* USER CODE BEGIN UART4_Init 0 */
/* USER CODE END UART4_Init 0 */
/* USER CODE BEGIN UART4_Init 1 */
/* USER CODE END UART4_Init 1 */
huart4.Instance = UART4;
huart4.Init.BaudRate = 1200;
huart4.Init.WordLength = UART_WORDLENGTH_8B;
huart4.Init.StopBits = UART_STOPBITS_1;
huart4.Init.Parity = UART_PARITY_NONE;
huart4.Init.Mode = UART_MODE_TX_RX;
huart4.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart4.Init.OverSampling = UART_OVERSAMPLING_16;
huart4.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart4.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN UART4_Init 2 */
HAL_UART_Receive_IT(&huart4,UART4_RxBuffer,1);
/* USER CODE END UART4_Init 2 */
}
/*!
* @brief 初始化AD5421
*
* @param None
*
* @return None
*/
void Init_AD5421(void)
{
uint16_t offset = 0;
uint16_t gain = 0;
Ctrl_AD5421(&hspi2,AD5421_RESET,0,true);
delay_us(50);
Ctrl_AD5421(&hspi2,AD5421_Control,0xFC00,true);
offset = Ctrl_AD5421(&hspi2,AD5421_Offset_Adjust,0,false);
gain = Ctrl_AD5421(&hspi2,AD5421_Gain_Adjust,0,false);
Ctrl_AD5421_DAC(20,true,offset,gain);
Ctrl_AD5421_ADC(1,true);
Ctrl_AD5421_ADC(0,true);
}
/*!
* @brief 使能HART_CLK_OUT的定时器,用于输入捕获,上升沿捕获,4次有效
*
* @param None
*
* @return freq: 浮点型频率变量,单位为Hz
*/
float Get_HART_CLK_Cycle(void)
{
uint32_t Count=0;
float freq=0;
TIM3_CH2_Flag=0;
TIM3_CH2_Overflow=0;
TIM3_CH2_Count[0]=0;
TIM3_CH2_Count[1]=0;
TIM_RESET_CAPTUREPOLARITY(&htim3,TIM_CHANNEL_2);
__HAL_TIM_SET_CAPTUREPOLARITY(&htim3, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_FALLING);
HAL_TIM_Base_Start_IT(&htim3);
HAL_TIM_IC_Start_IT(&htim3, TIM_CHANNEL_2);
while(TIM3_CH2_Flag<2);
TIM3_CH2_Flag=0;
Count=TIM3_CH2_Overflow*(0xFFFF+1)+TIM3_CH2_Count[1]-TIM3_CH2_Count[0];
freq=50000000.0f/Count;
TIM3_CH2_Overflow=0;
TIM3_CH2_Count[0]=0;
TIM3_CH2_Count[1]=0;
printf("[INFO] HART_CLK: %0.4f Hz\n",freq);
return freq;
}
/*!
* @brief 操作AD5700的HART调制/解调
*
* @param [in] dat_buf: 要写入的数据,可以填NULL
* [in] size: 要写入的数据个数,单位byte
* [in] WriteNotRead: true,写入(调制),发送UART数据然后通过HART发出来
* false,读取(解调),接收HART数据,解调以后以中断的方式接收UART数据
*
* @return None
*/
void Ctrl_AD5700_HART(uint8_t *dat_buf,uint8_t size,bool WriteNotRead)
{
if(WriteNotRead)
{
Disable_AD5700_RTS;
delay_ms(1);
HAL_UART_Transmit(&huart4,dat_buf,size,0xFFFF);
}
else
{
Enable_AD5700_RTS;
delay_ms(1);
HAL_UART_Receive_IT(&huart4,&UART4_RxBuffer[UART4_RxFlag],1); //开启中断 填入的buf最好是HART专用的数据buf 全局变量 然后在回调里面也改成HART的buf
}
}
/*!
* @brief 初始化AD5700
*
* @param None
*
* @return None
*/
void Init_AD5700(void)
{
//ADC检测
Enable_HART_CLK_CFG;
// //时钟检测
// Get_HART_CLK_Cycle();
// Disable_HART_CLK_CFG;
Ctrl_AD5700_HART(NULL,0,false);
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart==&huart2)
{
HAL_UART_Transmit(&huart2,&RxBuffer,1,0xFFFF);
HAL_UART_Receive_IT(&huart2,&RxBuffer,1);
}
else if(huart==&huart3)
{
HAL_UART_Transmit(&huart3,&RxBuffer,1,0xFFFF);
HAL_UART_Receive_IT(&huart3,&RxBuffer,1);
}
else if(huart==&huart4)
{
// HAL_UART_Transmit(&huart4,&UART4_RxBuffer[UART4_RxFlag],1,0xFFFF);
UART4_RxFlag++;
HAL_UART_Receive_IT(&huart4,&UART4_RxBuffer[UART4_RxFlag],1);
}
else if(huart==&huart5)
{
HAL_UART_Transmit(&huart5,&RxBuffer,1,0xFFFF);
if((RxBuffer>>5)==6)
{
load_dac=(RxBuffer&0x1F);
}
HAL_UART_Receive_IT(&huart5,&RxBuffer,1);
}
}