SLAM评测工具
安装EVO工具箱
- https://github.com/MichaelGrupp/evo
使用conda进入一个python3的环境,安装超时重试一次即可
pip install evo --upgrade --no-binary evo
数据格式与SLAM14奖轨迹的地方一致
重点说明,evo的使用技巧可以根据evo_apt tum -h命令来查看
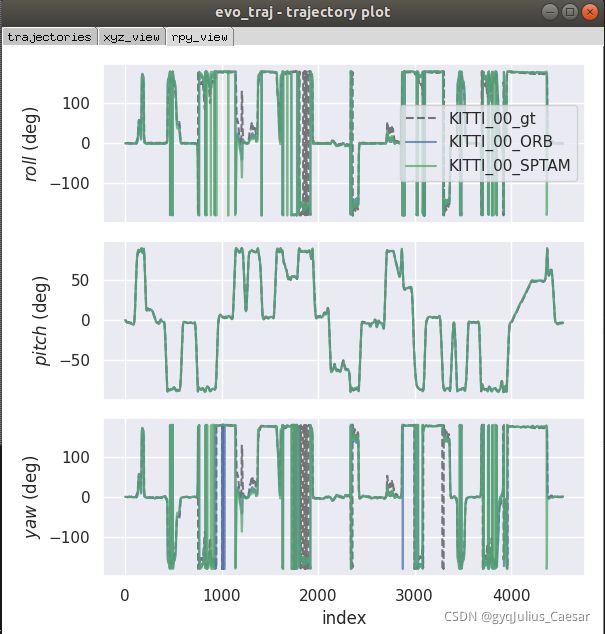
evo_traj
分析,绘制或者导出一个或多个轨迹的命令,测试evo自带的程序,后跟必要参数有:数据的格式(tum/kitti/bag/euroc等)+ 轨迹文件。轨迹文件可以有多个,例如:evo_traj tum traj1.txt traj2.txt,这个指令只是显示轨迹,若要绘制轨迹,则增加可选参数 -p 或 --plot,evo_traj tum traj1.txt –p
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz



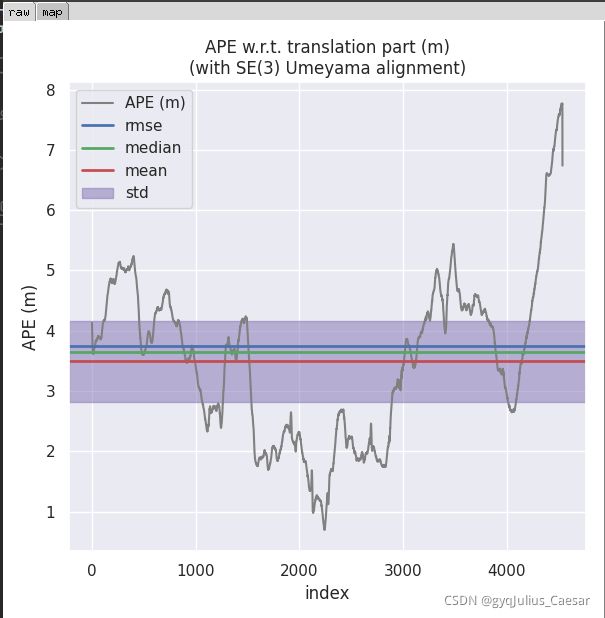
evo_ape
评测轨迹绝对位姿误差的工具
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip


evo_ape计算旋转误差
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz -r angle_deg

evo_res
比较多个结果文件,打印统计信息,绘图,保存结果到表格等
evo_res results/*.zip -p --save_table results/table.csv


其他功能
- evo支持多种格式的文件:tum, kitti, euroc, bag。也支持多种格式之间的相互转换,如:
# export a EuRoC groundtruth file to a TUM trajectory
evo_traj euroc data.csv --save_as_tum
# (will be saved as data.tum)
- evo支持保存图片为png或者PDF文件。
- evo_config 命令可支持自主配置,比如图片格式,坐标轴单位,图像大小等
- 另外evo有一个比较好的功能,就是能在单目SLAM或者单目视觉里程计中自动校准尺度。TUM提供的工具需要手动输入。在命令后加–align --correct_scale
evo_ape kitti KITTI_00_gt.txt KITTI_00_SPTAM.txt -va --plot --plot_mode xz --save_results results/SPTAM.zip --align --correct_scale

修改曲线或背景颜色
修改背景,其中whitegrid可以替换成darkgrid, whitegrid, dark, white, ticks
evo_config set plot_seaborn_style whitegrid
修改线条,其中bright可以替换成deep, muted, bright, pastel, dark, colorblind
evo_config set plot_seaborn_palette bright
调整大小
一般字体和行宽同时调整
调整字体大小:evo_config set plot_fontfamily serif plot_fontscale 2
调整行宽大小:evo_config set plot_linewidth 1.0
调整图像大小:evo_config set plot_figsize 10 9 #宽为10,高为9
参考轨迹的线条样式:evo_config set plot_reference_linestyle -
Use LaTeX renderer 使用 LaTeX 渲染器
因为我们使用 LaTeX 来写论文,所以我们也想使用 LaTeX 来渲染图中的字体:
evo_config set plot_usetex
您可能需要将 plot texsystem 参数更改为机器上安装的 LaTeX 系统,如果这在第一次尝试时不起作用,请参见 evo config show。
Advanced: plots can be also exported (–save_plot) in pgf format: evo_config set plot_export_format pgf.
也可以以 pgf 格式导出(-- save plot) : evo config set plot export format pgf
Restore default settings
evo_config reset
参考链接
https://blog.csdn.net/dcq1609931832/article/details/102465071
https://zhuanlan.zhihu.com/p/88223106
https://blog.csdn.net/hhaowang/article/details/105226136
https://blog.csdn.net/xiaojinger_123/article/details/120269185
https://rupingcen.blog.csdn.net/article/details/110485772?spm=1001.2014.3001.5506