数学分析-多元微积分
1. 度量空间中的极限和连续
(1)映射的极限:对两个度量空间映射 ![]() ,X的一个基为
,X的一个基为 ,若对
,若对 中的点A的任一邻域V(A),都存在基元素
中的点A的任一邻域V(A),都存在基元素![]() ,使得
,使得![]() ,则点A称为映射f关于基的极限。即
,则点A称为映射f关于基的极限。即![]()
有界映射:f(X)在欧氏空间中有界。
(2)基本列:下标充分大时点之间的距离可以任意小。。
完备度量空间:每个基本列都收敛的度量空间
(3)映射的连续:对映射 ![]() 以及点a,若对f(a)的任意邻域V(f(a)),存在点a在E中的邻域
以及点a,若对f(a)的任意邻域V(f(a)),存在点a在E中的邻域 ![]() ,使得
,使得 ![]() 。记作
。记作 ![]()
(4)一致连续:对任意的 ,存在
,存在  ,使得对任意满足
,使得对任意满足 ![]() 的
的![]() ,都有
,都有 ![]()
(5)映射的振幅:集合上的振幅为其像集的直径。点处的振幅为其邻域半径趋于0时的振幅极限 ![]()
(6)道路:![]() 是区间,函数组
是区间,函数组 ![]() 在I上连续,则称由
在I上连续,则称由 ![]() 定义的映射
定义的映射 ![]() 为中的道路。
为中的道路。
(7)连通集(道路连通集):集合E中的任意两点间都存在一条道路 ,则集合E称为连通集。
,则集合E称为连通集。
区域:连通的开集称为区域(开区域)。
(8)拓扑空间中的连通集:不能划分为两个不相交的开集的并。注意拓扑空间中没有度量,其连通集与度量空间中的定义并不完全相同。
主要定理:
(9)极限存在的充要条件:映射 ![]() 关于基有极限,当且仅当基中总存在集合B,使f在B上的振幅可无限接近0。即对
关于基有极限,当且仅当基中总存在集合B,使f在B上的振幅可无限接近0。即对 ,存在
,存在![]() ,使
,使![]() 。
。
(10)连续映射的局部性质:振幅为0(在一点处连续当且仅当该点处振幅为0)、局部有界性、可复合性(复合映射也连续)
(11)连续映射整体性质:对紧集K上的一般连续映射![]() ,有
,有
一致性连续性:在K上一致连续
有界性:在K上有界,有最大值和最小值(对映射值域为R的情况)
介值性:适用于连通集E上的连续映射 ![]() ,对任意的
,对任意的 ![]() ,以及任意f(a), f(b)之间的数c,存在点
,以及任意f(a), f(b)之间的数c,存在点![]() ,使
,使![]()
2. 多元函数微分学和场论
(1)微分(切映射/导映射):对欧氏空间上的一般映射 ![]() ,以及聚点
,以及聚点 ![]() ,有
,有 ![]() ,其中
,其中 是关于h的线性函数,o(h)是h的高阶无穷小。则称f在点x处可微,L(x)为f在x处的微分(切映射/导映射),记为
是关于h的线性函数,o(h)是h的高阶无穷小。则称f在点x处可微,L(x)为f在x处的微分(切映射/导映射),记为 ![]() 。
。
注意如果值域是一维的实数域,则向量函数成为普通的多元函数 ![]()
(2)偏导数(偏微分):多元函数在坐标轴方向上的变化率。从点到数量的映射 ![]() ,表示一个多元实值函数
,表示一个多元实值函数 ![]() 。对点中的某一分量代表的自变量
。对点中的某一分量代表的自变量 求一元导数(固定其他分量),称为f对该分量的偏导数。记作
求一元导数(固定其他分量),称为f对该分量的偏导数。记作
![]() ,注意这里偏导数是标量对标量求导。
,注意这里偏导数是标量对标量求导。
二阶偏导数:先对一个自变量求导,再对另一个自变量求导,记作 ![]() ,类似地可定义更高阶的偏导数。
,类似地可定义更高阶的偏导数。
(3)梯度:多元函数 ![]() 对所有自变量的偏导数组成的向量,即
对所有自变量的偏导数组成的向量,即  。函数在一点处沿着梯度方向变化最快,变化率最大(为该梯度的模)。
。函数在一点处沿着梯度方向变化最快,变化率最大(为该梯度的模)。
引进Nabla微分算子(哈密顿算子) ,它是一个作为运算符的形式向量,需要作用在函数上才会起作用。
,它是一个作为运算符的形式向量,需要作用在函数上才会起作用。
梯度就是将哈密顿算子作用在一个标量函数(数量函数)的结果:![]() ,梯度是一个矢量函数。
,梯度是一个矢量函数。
(4)向量的基本运算:
向量模:![]() ,闵可夫斯基不等式
,闵可夫斯基不等式 ![]() ,柯西-施瓦茨不等式
,柯西-施瓦茨不等式 ![]()
向量加法:对平面向量,几何上是平行四边行法则,结果是平行四边行对角线
向量内积(点积/数量积):![]() ,结果是标量,几何上是
,结果是标量,几何上是 在
在 上的投影。
上的投影。
向量正交:内积为0时表示向量正交。可用于计算长度和角度、验证几何图形正交性
向量外积:以三维向量为例,高维的向量外积运算可类似定义
外积的结果是一个向量,其模长是![]() 组成的平行四边形的面积,向量方向垂直于向量
组成的平行四边形的面积,向量方向垂直于向量![]() 组成的平面。
组成的平面。
(5)线性空间(向量空间):在数域P和集合K上定义加法和数量乘法运算,满足K上的加法交换律/结合律/单位元/可逆、P与K之间的数乘结合律/单位元/向量加法分配律/标量加法分配律,一共8条运算规则,则称K是域P上的线性空间(也叫向量空间)。K中的元素称为向量,P称为线性空间的基域。当P是实数域时K称为实线性空间,当P是复数域时K称为复线性空间。当K为全体n维实数向量时,线性空间记作 ![]() 。线性空间实质上是一个集合附上两个运算(加法和数乘)以及8条运算规则组成的结构。
。线性空间实质上是一个集合附上两个运算(加法和数乘)以及8条运算规则组成的结构。
欧几里德空间:实数域内,规定了内积的向量空间,记作 。
。
线性的意思表示空间中必有一组线性不相关的元素组成的基底,空间中的所有元素都可以由该基底唯一地线性表出。欧氏空间是线性空间,其中n个单位向量 组成一组相互正交的极大线性无关组,称为标准正交基。
组成一组相互正交的极大线性无关组,称为标准正交基。
(6)线性映射(线性变换):映射![]() (其中
(其中![]() )称为域R上的线性映射,若对任意地
)称为域R上的线性映射,若对任意地![]() ,都有
,都有![]() ,和
,和![]() 。
。
(7)向量场:若对全空间或某一匹域V中的每一点M,都有一个向量(或数量/标量)与之对应,则称在V上给定了一个向量场(或数量场/标量场)。以平面或三维空间为例,引进笛卡尔坐标系后,向量场就与向量函数 ![]() 对应。标量场就对应普通的数量函数
对应。标量场就对应普通的数量函数![]() 。一个三维向量场的向量函数如下:
。一个三维向量场的向量函数如下:
![]()
P, Q, R称为向量的坐标函数。
(8)梯度场:由梯度向量函数确定的向量场。梯度的作用对象是标量函数![]() ,算出的是向量。它表示标量变化最大方向的变化率。它每个点处算出的一个向量,其方向会是在任何一点上从其周围标量值最小处指向周围标量值最大处,其大小会是那个最小与最大的差距程度。梯度是哈密顿算子与数量函数做数乘的结果。
,算出的是向量。它表示标量变化最大方向的变化率。它每个点处算出的一个向量,其方向会是在任何一点上从其周围标量值最小处指向周围标量值最大处,其大小会是那个最小与最大的差距程度。梯度是哈密顿算子与数量函数做数乘的结果。
![]()
(9)散度场:由散度数量函数确定的标量场。散度的运算对象是向量函数![]() ,算出的是标量。散度表示向量场在某一点处的发散程度,正的代表往外散出,负的代表往内集中,越大表示发散程度越快。它是通量的微分,表示单位体积放射矢量的多少。每一点散度为0的向量场称为无源场。散度是哈密顿算子与向量函数做内积的结果。
,算出的是标量。散度表示向量场在某一点处的发散程度,正的代表往外散出,负的代表往内集中,越大表示发散程度越快。它是通量的微分,表示单位体积放射矢量的多少。每一点散度为0的向量场称为无源场。散度是哈密顿算子与向量函数做内积的结果。
![]()
(10)旋度场:由旋度向量函数确定的向量场。旋度的运算对象是向量函数![]() ,算出也是向量。旋度表示向量场在某一点的旋转程度。旋度是环量的微分,表示单位体积面环量的多少。旋度为0说明这个场是梯度场(保守场、无旋场),是发散的,没有漩涡。旋度是哈密顿算子与向量函数做外积的结果。
,算出也是向量。旋度表示向量场在某一点的旋转程度。旋度是环量的微分,表示单位体积面环量的多少。旋度为0说明这个场是梯度场(保守场、无旋场),是发散的,没有漩涡。旋度是哈密顿算子与向量函数做外积的结果。
(11)Jacobian矩阵:对一般的向量函数映射![]() ,表示成向量函数形式
,表示成向量函数形式 ![]() 。雅可比矩阵是所有坐标函数对各个变量的一阶偏导数组成的
。雅可比矩阵是所有坐标函数对各个变量的一阶偏导数组成的 阶矩阵,其中
阶矩阵,其中![]() ,完整形式如下
,完整形式如下
雅可比矩阵就是一般向量函数的导数。它是哈密顿算子作用在向量函数上的结果(得到一个张量,或者说矩阵),体现了多元向量函数的最佳线性逼近,其行列式称为雅可比行列式。如果是实值函数 ![]() ,则雅可比矩阵退化为函数的梯度。
,则雅可比矩阵退化为函数的梯度。
(12)Laplace算子:欧氏空间中的一个二阶微分算子,定义为梯度的散度,是对函数所有变量非混合二阶偏导数之和。记作 或
或 。
。
拉普拉斯算子是一个作用于标量函数的二阶微分运算,其结果也是标量。
(13)Hessian矩阵:一般用于多元实值函数 ![]() ,海森矩阵是函数的所有二阶偏导数组成的
,海森矩阵是函数的所有二阶偏导数组成的 阶方阵。
阶方阵。
海森矩阵就是一般多元函数的二阶导数,常用于求多元函数的极值问题。注意如果函数f在区域E内的二阶偏导连续,则海森矩阵是对称矩阵。由上述定义可知,雅可比矩阵的迹就是散度,海森矩阵的迹就是拉普拉斯运算的结果。
(14)临界点(稳定点/驻点):对映射![]() ,Jacobian矩阵秩小于
,Jacobian矩阵秩小于 ![]() 的点,称为f的临界点。特别地,对实值函数所有偏导数为0为点是临界点,如果这时二阶偏导数组成的Hessian矩阵不为0,则称为非退化临界点。不是局部极值的临界点称为鞍点。
的点,称为f的临界点。特别地,对实值函数所有偏导数为0为点是临界点,如果这时二阶偏导数组成的Hessian矩阵不为0,则称为非退化临界点。不是局部极值的临界点称为鞍点。
(15)方向导数:多元实值函数![]() ,在点
,在点![]() 处,沿向量
处,沿向量![]() 方向的直线上的点为
方向的直线上的点为![]() ,则沿
,则沿 的方向导数定义为
的方向导数定义为

在一点处可微是方向导数存在的充分条件,而非必要条件。方向导数是方向向量与梯度的内积。一个向量对应一个方向导数,而方向导数 可以看作是一个求导操作的映射
可以看作是一个求导操作的映射 ![]() ,即给定一个函数得到一个实数的映射(泛函)。这说明切向量可看成是函数上的某种算子(求导映射)。
,即给定一个函数得到一个实数的映射(泛函)。这说明切向量可看成是函数上的某种算子(求导映射)。
(16)![]() 函数:对实函数
函数:对实函数 ![]() ,若k阶偏导存在且连续,则称f是
,若k阶偏导存在且连续,则称f是![]() 函数。如果有任意阶的连续偏导数,则称f是
函数。如果有任意阶的连续偏导数,则称f是![]() 函数,
函数,![]() 也叫空间中光滑函数集。
也叫空间中光滑函数集。![]() 和光滑是同义词。
和光滑是同义词。![]() 表示连续函数。
表示连续函数。
![]() 向量函数:向量函数
向量函数:向量函数 ![]() 的所有分量
的所有分量  都是
都是![]() 的。若都是
的。若都是![]() 的,则也称为光滑的向量函数。
的,则也称为光滑的向量函数。
(17)光滑函数集![]() :表示空间中,点p处的所有光滑函数的集合,记作
:表示空间中,点p处的所有光滑函数的集合,记作![]() 。注意在点p的某个邻域内每点取值都相等的函数构成一个等价类(它们有相同的方向导数),只要取每个等价类中一个函数即可。实际上
。注意在点p的某个邻域内每点取值都相等的函数构成一个等价类(它们有相同的方向导数),只要取每个等价类中一个函数即可。实际上![]() 是域R上的向量空间。就是说把整个光滑函数当做一个元素,配备了向量加法和标量乘法后,这个元素就成为一个向量。
是域R上的向量空间。就是说把整个光滑函数当做一个元素,配备了向量加法和标量乘法后,这个元素就成为一个向量。
(18)解析函数:函数f在某点p处解析,表示在点p的某个邻域U内的所有点,f(x)可以用泰勒级数表示(也就是这个泰勒级数在邻域U是收敛的)。注意解析不等于光滑,解析强于光滑,光滑可能不解析。光滑函数总可以表示成带余项的泰勒展开式,但它不一定收敛到函数值。
(19)代数:域K上的向量空间![]() ,配备了向量乘法,且满足结合律、加法对乘法的分配律,则构成域K上的代数。
,配备了向量乘法,且满足结合律、加法对乘法的分配律,则构成域K上的代数。
(20)同态和同构:同态是保持运算结构的的映射;同构即是保持运算结构的双射,即同构不仅是同态,而且是双射,因此两个同构的对象可以看成是相同的(运算的意义下)。同态(或者同构)是一个框架,讨论的对象是群时就叫群同态(群同构);讨论的对象是向量空间时就叫线性映射(线性同构);讨论的对象是代数时,就叫代数同态(代数同构)。原因在于,线性空间的加法运算可以看成是加法群,而代数的乘法运算可以看成是乘法群。
代数同态:保持代数乘法的线性映射。若 是域K上的代数,如果线性映射
是域K上的代数,如果线性映射![]() 保持代数乘法,即
保持代数乘法,即![]() ,则线性映射L称为代数同态。
,则线性映射L称为代数同态。
(21)切向量:定义为光滑函数集上的一个求导映射(泛函算子)。![]() 是在集合E的点p处有定义的光滑函数集合,映射
是在集合E的点p处有定义的光滑函数集合,映射 ![]() 相当于一个泛函算子,如果满足求导性质,即
相当于一个泛函算子,如果满足求导性质,即![]() ,有
,有
![]()
![]()
![]()
则映射 是定义在集合E的某点p处的一个切向量。这是切向量最一般化的定义,是与普通曲线曲面相切的向量概念的推广。点p处的切向量与方向导数是对应的,切向量被定义为一个抽象的泛函(算子),而方向导数则指的是该映射的像值。
是定义在集合E的某点p处的一个切向量。这是切向量最一般化的定义,是与普通曲线曲面相切的向量概念的推广。点p处的切向量与方向导数是对应的,切向量被定义为一个抽象的泛函(算子),而方向导数则指的是该映射的像值。
(22)切空间:点p处所有切向量全体张成的线性空间称为点p处的切空间,记作![]() 。这是切空间的一般定义,是二维曲线的切线、三维曲面的切平面概念的推广。
。这是切空间的一般定义,是二维曲线的切线、三维曲面的切平面概念的推广。
(23)切映射的秩:光滑映射![]() 在点x的秩,是指Jacobian矩阵表示的切映射的秩,记作rank f(x)。
在点x的秩,是指Jacobian矩阵表示的切映射的秩,记作rank f(x)。
(24)微分同胚:对于中的开集到开集的映射 ![]() ,若f是双射,且
,若f是双射,且 和
和 都连续,则f为同胚映射,开集U和V是同胚的(
都连续,则f为同胚映射,开集U和V是同胚的(![]() 类微分同胚)。若和都是光滑的双射(即有任意阶连续偏导数),则U和V是微分同胚(
类微分同胚)。若和都是光滑的双射(即有任意阶连续偏导数),则U和V是微分同胚(![]() 类微分同胚)。若双射只有k阶连续偏导数,则f称为
类微分同胚)。若双射只有k阶连续偏导数,则f称为![]() 类微分同胚。微分同胚其实就是微分流形范畴内的同构。
类微分同胚。微分同胚其实就是微分流形范畴内的同构。
同胚(![]() 类微分同胚):连续的双射。同胚是在集合的映射上附加了双向连续的数学结构。
类微分同胚):连续的双射。同胚是在集合的映射上附加了双向连续的数学结构。
微分同胚(![]() 类微分同胚):光滑的双射。
类微分同胚):光滑的双射。
![]() 类微分同胚:有k阶连续偏导数的双射。
类微分同胚:有k阶连续偏导数的双射。
(25)最简微分同胚:即这个微分同胚只改变被映射点坐标中的一个。对微分同胚 ![]() ,写作从点
,写作从点 ![]() 映射到
映射到 ![]() ,如果下标
,如果下标  ,则映射值不变
,则映射值不变 ![]() ,否则
,否则 ![]() ,这就是最简微分同胚。
,这就是最简微分同胚。
![]()
(26)函数相关与函数独立:对一般的映射 ![]() ,记作f(x)=y,其中
,记作f(x)=y,其中 ![]() 。将函数f写成分量的形式
。将函数f写成分量的形式 ![]() ,我们就会得到n个函数
,我们就会得到n个函数

如果存在 ![]() ,且存在函数
,且存在函数 ![]() ,使得
,使得 ![]() ,有
,有
![]()
则称函数组 在E上是函数相关的。如果 在E的任意非空子集上不函数相关,则称这n个函数在E上函数独立,也即其中任一函数都不能由其他函数表示出来。
注意m个函数在某集合上函数相关和函数独立肯定是互斥事件,但不一定是对立事件,也就是说可能既非函数相关也非函数独立。例如在D上不是函数相关的,但在D的某个非空子集上却函数相关。函数独立性常用于常微分方程中,用来定义常微分方程的通解。
(27)k维光滑曲面(k维子流形):如果对任意的点 ![]() ,都存在p的邻域到单位正方体
,都存在p的邻域到单位正方体 ![]() 的微分同胚
的微分同胚 ![]() ,使得集合
,使得集合 ![]() 在这个微分同胚下的像在
在这个微分同胚下的像在 ![]() 中的部分是由
中的部分是由 ![]() 确定的k维平面,则称S为中的k维光滑曲面,也称为k维子流形。
确定的k维平面,则称S为中的k维光滑曲面,也称为k维子流形。
中的k维光滑曲面可由n-k个光滑函数组成的方程组来确定,![]() ,当然前提是F光滑且其秩为n-k。方程组展开形式为
,当然前提是F光滑且其秩为n-k。方程组展开形式为

由反函数定理可以证明它符合k维光滑曲面的定义,因此可以确定一个k维光滑曲面。
(28)k维曲面的切空间:如果k维曲面![]() 在点
在点  的邻域内,由参数形式的光滑映射
的邻域内,由参数形式的光滑映射 ![]() 给出,并且
给出,并且 ![]() 处,矩阵
处,矩阵![]() 的秩为k,那么用参数矩阵形式
的秩为k,那么用参数矩阵形式 ![]() 给出的中的k维平面,称为曲面S在点
给出的中的k维平面,称为曲面S在点 处的切平面或切空间。
处的切平面或切空间。
一元函数y=f(x)的切线方程:![]()
二元函数z=f(x, y)的切平面方程:![]()
k维光滑曲面的切空间方程:![]() ,它是光滑曲面上一点处对应的k维平面,记作
,它是光滑曲面上一点处对应的k维平面,记作![]() 。切空间就是满足方程
。切空间就是满足方程![]() 的向量构成的向量空间,这也是切空间术语的由来。
的向量构成的向量空间,这也是切空间术语的由来。
(29)等值曲面(等高曲面):多元实值函数 ![]() 有一阶连续偏导数,曲面
有一阶连续偏导数,曲面 ![]() 是一个n维平面,它是
是一个n维平面,它是  中的一个取值在D中,高度为
中的一个取值在D中,高度为 的等高面,称为f在点处的等值面,用方程
的等高面,称为f在点处的等值面,用方程 ![]() 表示。
表示。
等值曲面的切空间![]() :由等值面
:由等值面![]() 在处的切向量组成空间,可用向量方程
在处的切向量组成空间,可用向量方程 ![]() 表示。
表示。
主要定理:
(1)可微的等价性:映射 ![]() 在聚点
在聚点![]() 处可微,等价于f的每个分量坐标函数
处可微,等价于f的每个分量坐标函数 ![]() 在点x处都可微。
在点x处都可微。
(2) 可微必要条件和唯一性:映射 ![]() 在聚点
在聚点![]() 处可微,则它在点x处所有偏导数都存在,微分由这些偏导数组成的Jacobian矩阵唯一的确定,即
处可微,则它在点x处所有偏导数都存在,微分由这些偏导数组成的Jacobian矩阵唯一的确定,即 ![]() 。对实值函数
。对实值函数 ![]() ,这有时也称为全微分,记作
,这有时也称为全微分,记作![]()
(3)拉格朗日中值定理:对定义在区域G上的实值函数![]() ,如果f在闭长方体
,如果f在闭长方体 ![]() 内连续,在开长方体(x, x+h)内可微,则存在点
内连续,在开长方体(x, x+h)内可微,则存在点 ![]() ,便得
,便得 ![]()
注意闭长方体类似于一维的闭区间:![]()
(3)可微的充分条件:映射 ![]() 如果在点x处的所有偏导数都存在且连续,则它在点x处可微。简单地说,可微则所有偏微分都存在但偏微分不一定连续。若所有偏微分都存在且连续,则f必可微(并且f也是连续)。
如果在点x处的所有偏导数都存在且连续,则它在点x处可微。简单地说,可微则所有偏微分都存在但偏微分不一定连续。若所有偏微分都存在且连续,则f必可微(并且f也是连续)。
(5)高阶偏导顺序无关性:若实值函数 ![]() 在G上存在偏导数
在G上存在偏导数  并且连续,则这两个偏导数相等。这说明若高阶偏导数连续,则跟它的求偏导顺序无关。
并且连续,则这两个偏导数相等。这说明若高阶偏导数连续,则跟它的求偏导顺序无关。
(6)泰勒定理:若函数 ![]() 在G内有m阶连续偏导数,而闭长方体
在G内有m阶连续偏导数,而闭长方体 ![[x,x+h] \subset G](http://img.e-com-net.com/image/info8/c97620f459f2487793b60f66dc0a972b.gif) ,则有泰勒公式
,则有泰勒公式

其中 ![]() 表示所有可能的不同形式的k阶偏导的和式(参考二项式定理)。
表示所有可能的不同形式的k阶偏导的和式(参考二项式定理)。
积分型余项:![]()
拉格朗日型余项:![]()
佩亚诺型余项:![]()
(7)极值必要条件:实值函数 ![]() 在点x处有局部极值,则f在x处对各变量的偏导数值都为0。
在点x处有局部极值,则f在x处对各变量的偏导数值都为0。
(8)多元函数极值充分条件:函数 ![]() 二阶连续可导,在临界点 处计算其Hessian矩阵H,当H是正定矩阵时,该临界点是一个局部极小值点;当Hessian矩阵是负定矩阵时,该临界点是一个局部极大值点;当H=0时需要更高阶的导数来判断;在其余的情况下,该临界点不是局部极值点。
二阶连续可导,在临界点 处计算其Hessian矩阵H,当H是正定矩阵时,该临界点是一个局部极小值点;当Hessian矩阵是负定矩阵时,该临界点是一个局部极大值点;当H=0时需要更高阶的导数来判断;在其余的情况下,该临界点不是局部极值点。
(9)欧氏空间中,某点p处的所有光滑函数集 ![]() 是域R上的线性空间,并且也是域R上的代数。
是域R上的线性空间,并且也是域R上的代数。
(10)隐函数定理:对定义在开集G上的映射 ![]() ,G中的点可写成
,G中的点可写成  的形式,f的雅可比矩阵可写成以下形式
的形式,f的雅可比矩阵可写成以下形式
如果f有 阶连续偏导数,在点
阶连续偏导数,在点![]() 处满足
处满足 ![]() ,
, 有逆矩阵。隐函数定理给出了一个充分条件,用来判断能否在点(a, b)附近定义一个y关于x的函数g,使得f(x, y)=0等价于y=g(x)。严格地说,就是在点(a, b)附近存在满足
有逆矩阵。隐函数定理给出了一个充分条件,用来判断能否在点(a, b)附近定义一个y关于x的函数g,使得f(x, y)=0等价于y=g(x)。严格地说,就是在点(a, b)附近存在满足![]() 的两个开集
的两个开集 ![]() 和
和 ![]() ,并且存在
,并且存在![]() 类映射(即有k阶连续偏导)
类映射(即有k阶连续偏导)  ,使得对任意的
,使得对任意的 ![]() 都有
都有 ![]() 。同时函数y=g(x)在点
。同时函数y=g(x)在点![]() 处的导数为
处的导数为
隐函数定理表达的意思是,光滑映射非临界的零点附近必有一个光滑的隐映射。
(11)反函数定理:对定义在开集G上的映射 ![]() ,如果f有阶连续偏导数,在点
,如果f有阶连续偏导数,在点 ![]() 处
处  有逆矩阵,则存在含有的开集
有逆矩阵,则存在含有的开集![]() 和含有的开集
和含有的开集![]() ,使得
,使得 ![]() 是
是![]() 类微分同胚(即有阶连续偏导数的双射)。并且逆映射
类微分同胚(即有阶连续偏导数的双射)。并且逆映射 ![]() 可微,满足
可微,满足 ![]() 。
。
反函数定理表达的意思是,光滑映射的每个非临界点附近必有一个对应的光滑逆映射。
(12)秩定理:对定义在开集G上的映射 ![]() ,G中元素用x表示,中用y表示,写作
,G中元素用x表示,中用y表示,写作 。如果f有阶连续偏导数,且在任意一点
。如果f有阶连续偏导数,且在任意一点 ![]() 处的雅可比矩阵的秩都是k,则存在含有的开集
处的雅可比矩阵的秩都是k,则存在含有的开集![]() 和含有的开集
和含有的开集![]() ,以及
,以及![]() 类微分同胚
类微分同胚 ![]() ,和
,和![]() 类微分同胚
类微分同胚 ![]() ,使得
,使得 和
和 像集之间的局部映射
像集之间的局部映射 ![]() 能把一个点映射为其前k个分量的投影(后n-k个分量全部变为0),即
能把一个点映射为其前k个分量的投影(后n-k个分量全部变为0),即 ![]() 。这就是通过映射
。这就是通过映射  把f变换为中简化的k维光滑曲面。
把f变换为中简化的k维光滑曲面。
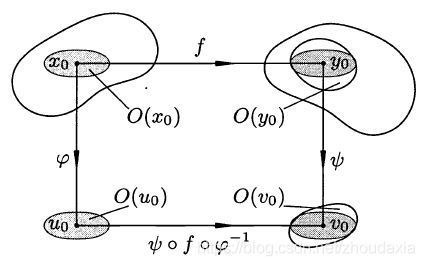
秩定理表达的意思是,秩为k的光滑映射,在任意一点附近必存在一个同秩的光滑映射,把原映射中的点映射为简化的k维子流形。用图像表示如下:
(13)函数独立判别法:考虑定义在 ![]() 上的n个光滑函数(即连续可微)构成的函数组 ,它是映射
上的n个光滑函数(即连续可微)构成的函数组 ,它是映射 ![]() 中的n个分量。如果f在任意一点
中的n个分量。如果f在任意一点 ![]() 处的导数对应的雅可比矩阵的秩都是k,则当k=n时,函数组在E内是函数独立的。当k
处的导数对应的雅可比矩阵的秩都是k,则当k=n时,函数组在E内是函数独立的。当k![]() ,使得
,使得 ![]() 。
。
函数独立性的判别常用在解常微分方程中。
(14)微分同胚分解定理:如果映射![]() 是微分同胚,则对任意一点
是微分同胚,则对任意一点 ![]() ,都存在它一个邻域,在该邻域内f可分解为m个最简微分同胚的复合。即
,都存在它一个邻域,在该邻域内f可分解为m个最简微分同胚的复合。即 ![]() 成立,这里
成立,这里![]() 是最简微分同胚(即只改变被映射点中单个坐标值的微分同胚)。
是最简微分同胚(即只改变被映射点中单个坐标值的微分同胚)。
(15)Hadamard引理:映射 ![]() 是定义在原点
是定义在原点 ![]() 的凸邻域U内的
的凸邻域U内的![]() 类函数,且
类函数,且  ,则存在函数组
,则存在函数组  ,便得在邻域U内,下述等式成立
,便得在邻域U内,下述等式成立
 ,且
,且 ![]()
(16)Morse引理:如果映射 ![]() 是
是 ![]() 类函数,
类函数,![]() 是f的非退化临界点,则存在从点邻域U到原点
是f的非退化临界点,则存在从点邻域U到原点 ![]() 邻域V的微分同胚
邻域V的微分同胚 ![]() ,它把f在
,它把f在 中任意点x处的值f(x),化为
中任意点x处的值f(x),化为![]() 中的点
中的点 ![]() 处的二次型的对角形,即有
处的二次型的对角形,即有 ![]() 。
。
莫尔斯引理是关于多元函数在非退化临界点附近的重要性质。它表明在非退化临界点附近存在一个局部光滑可逆的坐标变换![]() ,函数在此坐标变换下化为二次型,称为莫尔斯标准型,或莫尔斯k级鞍。式中负项个数k是一个重要参数,称为非退化临界点的指数。k为拓扑不变量,不因坐标变换而改变。莫尔斯引理保证每个非退化临界点通过一个光滑可逆坐标映射变换为一个k级莫尔斯鞍。
,函数在此坐标变换下化为二次型,称为莫尔斯标准型,或莫尔斯k级鞍。式中负项个数k是一个重要参数,称为非退化临界点的指数。k为拓扑不变量,不因坐标变换而改变。莫尔斯引理保证每个非退化临界点通过一个光滑可逆坐标映射变换为一个k级莫尔斯鞍。
(17)条件极值的必要条件:定义在开集上的目标函数 ![]() 有一阶连续偏导数,约束条件
有一阶连续偏导数,约束条件 ![]() 是D中的m维光滑曲面。是f的非临界点(即满秩的点),处的等值面为
是D中的m维光滑曲面。是f的非临界点(即满秩的点),处的等值面为![]() 。如果是函数
。如果是函数![]() 的局部极值点(即点只能限制于f在曲面S上的部分),则S的切空间是N的切空间的子集,即
的局部极值点(即点只能限制于f在曲面S上的部分),则S的切空间是N的切空间的子集,即 ![]() 。用方程表示就是在处,f的梯度可由
。用方程表示就是在处,f的梯度可由 的梯度线性表示
的梯度线性表示  。
。
直观上看,极值点必是目标函数的等值面族与约束曲面S能相切的那个点。
(18)条件极值的充分条件(拉格朗日乘数法):定义在开集上的目标函数 ![]() 有二阶连续偏导数,约束条件
有二阶连续偏导数,约束条件 ![]() 是D中的m维光滑曲面,其中
是D中的m维光滑曲面,其中 有二阶连续偏导数,函数组F在D中任一点的秩都是m。引入由n+m个变量
有二阶连续偏导数,函数组F在D中任一点的秩都是m。引入由n+m个变量![]() 组成的拉格朗日函数
组成的拉格朗日函数
![]()
![]() 的条件极值点必是
的条件极值点必是 的临界点。因为的临界点处有
的临界点。因为的临界点处有

![]()
正好满足条件极值必要条件。但的临界点却不一定是![]() 条件极值点。需要通过二阶导数来判断,下面是充分条件。
条件极值点。需要通过二阶导数来判断,下面是充分条件。
在的临界点 处计算其关于f(x)部分的Hessian矩阵![]() ,当
,当![]() 是正定矩阵时,点是
是正定矩阵时,点是![]() 的严格局部极小值点;当
的严格局部极小值点;当![]() 是负定矩阵时,该点是
是负定矩阵时,该点是![]() 的严格局部极大值点;当
的严格局部极大值点;当![]() 为0,需要更高阶的导数来判断。其余情况下点不是
为0,需要更高阶的导数来判断。其余情况下点不是![]() 的极值点。
的极值点。