ROS:入门
前言
ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。ROS的原型源自斯坦福大学的STanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)项目。
机器人的工业界和学术界在软件工具的使用上是有明显的分歧的。由于机器人的工业界并不像消费类电子这样出货量巨大,所以绝对高的技术壁垒和封闭的生态是十分常见的。为了提高自己的技术壁垒,这些公司往往会自己设计一整套封闭的软硬件,以达到让其他人(竞争对手或开发者)无法用自己的工具替换之的目的。而学术界,学生和老师们为了减少重复造轮子的工作,往往会拥抱开源社区,选择现有的工具进行开发和研究,最广为人知的便是ROS(Robot Operating System)。
ROS是什么
ROS/ROS 2 并不是一个软件,而是一系列软件的集合。一般我们称之为软件解决方案堆栈。包含如硬件驱动程序、网络模块、通信架构和机器人算法等等。ROS将所有这些功能包放在一个保护伞下,因此开发人员无序重新造轮子。
ROS并不是一个操作系统,而是元操作系统,即基于操作系统上的类操作系统。
ROS并不是一个中间件,因为它实现了包括感知、导航、控制、运动规划和仿真等多种功能

ROS1.0版本发布于2010年,基于PR2机器人开发了一系列机器人相关的基础软件包。随后ROS版本迭代频繁,ROS的版本一般会随着Ubuntu系统长期支持(LTS)版本而更新,其中ROS目前最新的版本都已经适配到Ubuntu 20.04 LTS。ROS仅在Ubuntu上进行CI测试,但是社区成员积极支持其他Linux版本、Mac OS X、Android、Windows,使得ROS可以兼容,但仅提供有限制性的功能支持。

ROS的优缺点对比
ROS最早的设计目标就是开发这样一款PR2家庭服务机器人,这款机器人绝大部分时间都是独立工作,为了让他具备充足的能力:
- 它搭载了工作站级别的计算平台和各种先进的通信设备,不用担忧算力不够,有足够的实力支持各种复杂的实时运算和处理;
- 由于是单兵作战,通信绝大部分都自己内部完成,那就可以用有线连接,保证了良好的网络连接,没有丢数据或者黑客入侵的风险;
- ROS1中的分布式机制需要良好的网络才能保证数据的完整性,而且网络不具备数据加密、安全防护等功能,网络中的任意主机都可以获得节点发布或接受的消息数据。
- ROS1稳定性欠佳,ROS Master、节点等重要环节在很多情况下会莫名宕机。
- ROS1基于Linux系统,在其它系统上无法应用或者功能有限,这就对机器人开发者和开发工具提出了较高要求,局限性较大。
- 多机器人系统可以解决单机器人性能不足、无法应用等问题,但ROS1中并没有构建多机器人系统的标准方法。
- 很多场景下的机器人对实时性要求较高,而ROS1缺少实时性方面的设计。
这台机器人最终虽然小批量生产,但是由于高昂的成本和售价,也只能用于学术研究。

ROS的成熟案例
ROS已经走过十个年头,伴随着机器人技术的大发展,ROS也得到了极大的推广和应用。尽管ROS还存在不少局限性,但无法掩盖ROS的锋芒,社区内的功能包还是呈指数级逐年上涨,为机器人开发带来了巨大的便利。不少开发者和研究机构还针对ROS的局限性进行了改良,但这些局部功能的改善往往很难带来整体性能的提升,在行业内也积累了大量成熟的应用:
机械臂控制器中领军企业KEBA,他们的控制器已经支持ROS :

百度apollo无人车的底层是基于ROS开发的:

总体来说,ROS更适合科研和开源用户使用,如果在工业场景应用(例如无人驾驶)还需要做优化和定制,目前ROS已经停止更新,机器人开发者对新一代ROS的呼声越来越大,ROS2.0的消息也不绝于耳。
ROS 2
ROS无法真正进入产业界,也自然无法产品化。为了解决这一问题,社区提出了ROS 2。使得ROS具备产品化的特性,包括实时性、适应于全平台、适用于性能低的硬件(MCU+RTOS)、分布式、数据加密和现代编程语言的支持。

2017年,ROS2的第一个正式版本Ardent Apalone发布,ROS2不是ROS1的更新,而是整体架构的颠覆,综合性能也得到了较大增强。
ROS2怀揣变革智能机器人时代的历史使命,在设计之初,就考虑到要满足各种各样机器人应用的需求。
- 多机器人系统:未来机器人一定不会是独立的个体,机器人和机器人之间也需要通信和协作,ROS2为多机器人系统的应用提供了标准方法和通信机制,它增加多机器人系统的支持,提升多机器人之间通信的网络性能。
- 跨平台:机器人应用场景不同,使用的控制平台也会有很大差异,比如自动驾驶汽车中的算力性能肯定比AMR机器人强很多,为了让所有机器人都可以运行ROS2,ROS2可以跨平台运行于Linux、Windows、MacOS、RTOS,甚至是没有任何系统的微控制器(MCU,比如常见的ARM-M4、M7内核)上,这样我们就不用纠结自己的控制器能不能用ROS了。
- 实时性:机器人运动控制和很多行为策略要求机器人具备实时性,比如机器人要可靠得在100ms内发现前方的行人,或者稳定的在1ms周期内完成运动学、动力学的解算,ROS2为类似这样的实时性需求提供了基本保障。
- 网络连接:无论在怎样的网络环境下,ROS2都可以尽量保障机器人大量数据的完整性和安全性,比如在wifi信号不好的时候数据也要尽力发送过去,在有黑客入侵风险的场景下要对数据进行加密解密。
- 产品化:,大量机器人已经走向我们的生活,未来还会越来越多,ROS2不仅可以用于机器人研发阶段,还可以直接搭载在产品中,走向消费市场,这对ROS2的稳定性、强壮性也提除了巨大挑战。
- 项目管理:机器人开发是一个复杂的系统工程,设计、开发、调试、测试、部署等全流程的项目管理工具和机制,也会在ROS2中体现,更方便我们去开发一款机器人。
要满足这些需求,ROS2的设计和开发工作并不简单,相对手机这样标准化的产品,Android系统也可以尽量做到标准化,但是机器人课时千差万别,如何能够适合尽量多的机器人,这可能远比开发一个手机系统或者电脑系统更加复杂。
ROS开发者面对的选择有两个,第一个是在ROS1的架构之上,进行修改和优化,类似一个盖好的房子,我们把它打成毛坯房,重新装修翻新一下,但肯定会受制于原本建筑的格局,长远来看并不是最佳选择,他们最终选择了第二种方案,那就是推倒重来。
所以ROS2是一个全新的机器人操作系统,在借鉴ROS1成功经验的基础上,对系统架构和软件代码全部进行了重新设计和实现。与ROS1相比,体现在以下几点:

- 系统架构进行了颠覆性的变化,ROS1中所有节点都需要在节点管理器ROS Master的管理下进行工作,一旦Master出现问题,系统就面临宕机的风险,ROS2实现了真正的分布式,不再有Master这个角色,借助一种全新的通信框架DDS,为所有节点的通信提供可靠保障。
- 软件API进行了重新设计,ROS1原有的接口已经无法满足需求,ROS2结合C++最新标准和Python3语言特性,设计了更具通用性的API,虽然导致原有ROS1的代码无法直接在ROS2中运行,但是尽量保留了类似的使用方法,同时提供了大量移植的说明。
- 编译系统进行了升级,ROS1中使用的rosbuild和catkin问题诸多,尤其是针对代码较多的大项目以及Python编写的项目,编译、链接经常会出错,ROS2对这些问题也进行了优化,重新优化后的编译系统叫做ament和colcon
系统架构
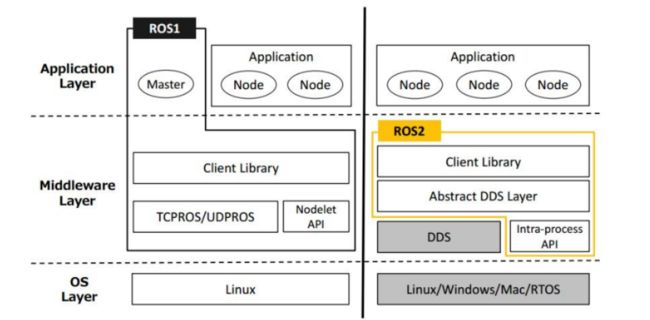
在这张图中,左侧是ROS1,右侧是ROS2,大家注意看两者最明显的变化,那就是Master。
- OS层:在ROS2中可以构建在linux上,也可以构建在其它系统上,甚至是没有操作系统的裸机。
- 中间层:
- 中间层是ROS封装好的标准通信接口,我们写程序的时候,会频繁和这些通信接口打交道,比如发布一个图像的数据,接收一个雷达的信息,客户端库会再调用底层复杂的驱动和通信协议,让我们的开发变得更加简单明了。
- 在ROS1中,ROS通信依赖底层的TCP和UDP协议,而在ROS2中,通信协议更换成了更加复杂但也更加完善的DDS系统。如果是在进程内需要进行大量数据的通信,ROS1和ROS2都提供了基于共享内存的通信方法,只不过名字不太一样而已。
- 为啥要引入DDS?为了解决消息间通讯的去中心化和实时性问题
- 什么是DDS?数据分发服务(Data Distribution Service)。2004年发布,是一种专门为分布式实时系统设计的数据分发/订阅标准解决方案,已经广泛应用于国防、民航、工业控制等领域。其技术关键是以数据为核心的发布/订阅模型,即DCPS模型,这种模型创建了一个“全局数据空间”的概念,所有独立的应用都可以访问。
- 应用层:在ROS1中,应用层里Master这个节点管理器的角色至关重要,所有节点都得听它指挥,类似是一个公司的CEO,有且只有一个,如果这个CEO突然消失,公司肯定会成一团乱麻。ROS2把这个最不稳定的角色请走了,节点可以通过另外一套discovery——自发现机制,找到彼此,从而建立稳定的通信连接。
- 在ROS 1中,用户的每个节点,无论是同一设备还是不同设备,必须已知Master节点的IP,并且全部依赖于Master节点进行通讯,一旦Master节点发生故障或该设备发生故障,则整个环境的所有节点功能尽失。无法恢复。也正因为这一点,ROS 1无法应用于正式的产品。
- ROS 2引入了基于DDS的去中心化的数据通讯方式,不同节点可以通过未知IP的方式进行通讯,也进而有助于解决多机器人系统的问题。并且ROS 2也引入了 Quality of Service的机制,通过设定不同的服务质量来保障某些较差网络环境下也可以具备良好的通讯效果。
数据加密
ROS 2在DDS的基础之上引入了SROS的概念,设计文档参考ROS 2 DDS-Security integration,即所有的ROS 2消息均可通过SROS进行加解密、鉴权、授权控制、Log和数据标记的权限控制等。基于ROS 2的原本设计逻辑,我们甚至可以将数据的密钥生成和存储放到ARM TEE OS中,以实现较高安全的数据保证
现代编程语言的支持
由于ROS 1的最初发行版在2007年,长期以来的支持和众多开发库的支持导致很多语言的新特性并不能良好地应用。比如对于Python,直至2020年发布的Noetic版本中才首次支持了Python 3,而Python 2在2020年1月便已经停止进行支持了。再如C++,ROS 1是基于C++ 03实现的,对于C++ 11的支持并不好,更不用谈C++ 14和C++ 17的支持。
ROS 2则完全支持Python 3,并基于现代C++编写。并基于其松耦合的方式,还支持Java和Rust等编程语言。如下图User Application下面那一行所示,只要开发者愿意,可以支持任何编程语言。

5G的支持
ROS 2在Ericsson的推动下,正在商讨5G的ROS 2通讯方案的制定和实现
全新的生态
继承ROS 1广博的开源生态资源,ROS 2的发布激起了大家对于ROS产品化的热情,许多公司都向ROS 2贡献方案和代码,包括但不限于Intel、NVIDIA、Ericsson等。
除了贡献新的代码,ROS 1的优秀工具也都被完全继承到ROS 2里,如Moveit、Rviz和rosbag等。并且有些模块,如navigation(导航),在开发者的改进中升级为navigation2,改善了诸多问题,提高了使用的便利性。
多种通讯方式
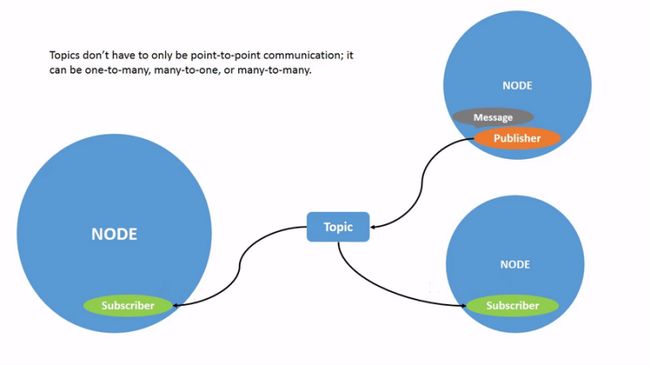
ROS 2 Topic通讯节点和节点之间进行通讯的桥梁,节点可以同时发布和接收话题,节点和话题之间是多对多关系。
Service(服务)是ROS图上节点通信的另一种方法,服务基于呼叫响应模型,而不是主题的发布者-订阅者模型。服务端和客户端之间,是一对一或一对多关系。

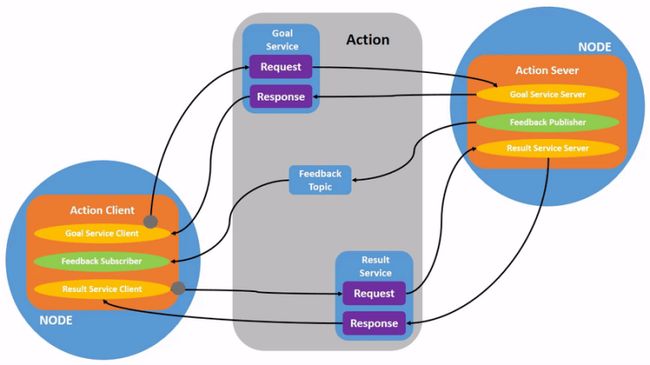
Action是ROS 2中用于长时间运行任务的通信类型之一,它们由三部分组成:目标,结果和反馈。
DDS通信

ROS2相比ROS1最大的变化,除了省略了Master之外,应该就是通信系统的变化了。ROS1中基于TCP/UDP的通信系统,频繁诟病于延迟、丢数据、无法加密等问题,ROS2中的DDS在通信层面的功能就丰富多了。
DDS其实是物联网中广泛应用的一种通信协议,类似于我们常听说的5G通信一样,DDS是一个国际标准,能够实现该标准的软件系统并不是唯一的,所以我们可以选择多个厂家提供的DDS系统,比如这里的OpenSplice、FastRTPS,还有更多厂家提供的,每一家的性能不同,适用的场景也不同。
不过这就带来一个问题,每个DDS厂家的软件接口肯定是不一样的,如果我们按照某一家的接口写完了程序,想要切换其他厂家的DDS,不是要重新写代码么?这当然不符合ROS提高软件复用率的目标。
为了解决这个问题,ROS2设计了一个ROS Middleware,简称RMW,也就是指定一个标准的接口,比如如何发数据,如何收数据,数据的各种属性如何配置,都定义好了,如果厂家想要接入ROS社区,就得按照这个标准写一个适配的接口,把自家的DDS给移植过来,这样就把问题交给了最熟悉自家DDS的厂商。对于我们这些用户来讲,某一个DDS用的不爽,只要安装另一个,然后做一个简单的配置,程序一行的都不用改,轻松更换底层的通信系统。
举一个例子,比如我们在产品开发时,可以先用开源版本的DDS满足基本需求,部署交付的产品时,再更换为商业版本更稳定的DDS,这样可以减少开发成本。
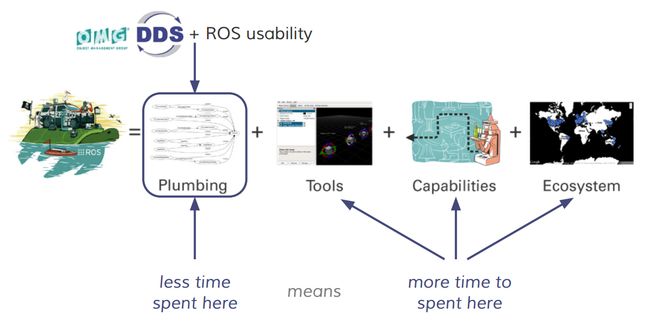
总之,DDS的加入,让ROS2系统更加稳定,也更加灵活,当然复杂度也会高一些。这样,我们不用再纠结ROS的通信系统是否稳定、该如何优化等问题,更多精力都可以放在其他三个部分,专注优化我们的机器人应用功能。
-
ROS 2提供了一种基于生命周期的管理模式, 即每个节点的运行状态是完全可控的。参考设计文档Managed nodes的阐述。所有Managed节点都可以在运行时进行实时配置、管理、关闭和启动,并在出错时可以由管理节点进行唤醒和重置。这种方式保证了整个系统的稳定性和鲁棒性,也提高了系统出错后恢复到正常的能力。
-
ROS 2在运行时可以更换DDS中间件,也可以在不同DDS中间件的实现间进行通讯。
核心概念

ROS 2的成熟案例
美军投资的Ghost Robotics,其四足机器人使用了Eloquent版本的ROS 2进行开发,DDS方案选用的是商用的Cyclone DDS。

总结
汽车产业真正的革命已经开始,软件定义汽车的时代已经到来。汽车正加速从从机械设备向高度数字化、信息化的智能终端转变,涉及领域庞大并且复杂。一辆自动驾驶的汽车,从某种意义上来说,也是一个自动驾驶的机器人,理所当然的可以是使用ROS 2进行开发,ROS 2提供了大量基础组件,大大便利了包括导航算法、自动驾驶算法和一些AI算法的部署。当然ROS 2仍然有很多缺陷,ROS 2的调度模型无法抢占,有时候优先级高的调度实例可能被低优先级的调度阻塞,还没有一家汽车行业公司利用ROS 2将产品落地。