浅谈Linux内核slab系统的内核优化
作为这个系列的第一篇,我先来描述一下slab系统。因为近些天有和同事,朋友讨论过这个主题,而且觉得这个主题还算比较典型,所以就作为第一篇了。其实按照操作系统理论来讲,进程管理应该更加重要些,按照我自己的兴趣来讲,IO管理以及TCP/IP协议栈会更加有分量,关于这些内容,我会陆续给出。
Linux内核的slab来自一种很简单的思想,即事先准备好一些会频繁分配,释放的数据结构。然而标准的slab实现太复杂且维护开销巨大,因此便分化出了更加小巧的slub,因此本文讨论的就是slub,后面所有提到slab的地方,指的都是slub。另外又由于本文主要描述内核优化方面的内容,并不是基本原理介绍,因此想了解slab细节以及代码实现的请自行百度或者看源码。
单CPU上单纯的slab
下图给出了单CPU上slab在分配和释放对象时的情景序列:
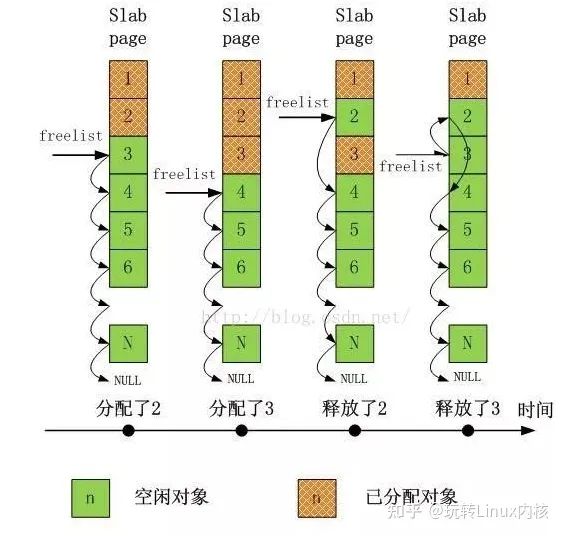
可以看出,非常之简单,而且完全达到了slab设计之初的目标。
扩展到多核心CPU
现在我们简单的将上面的模型扩展到多核心CPU,同样差不多的分配序列如下图所示:
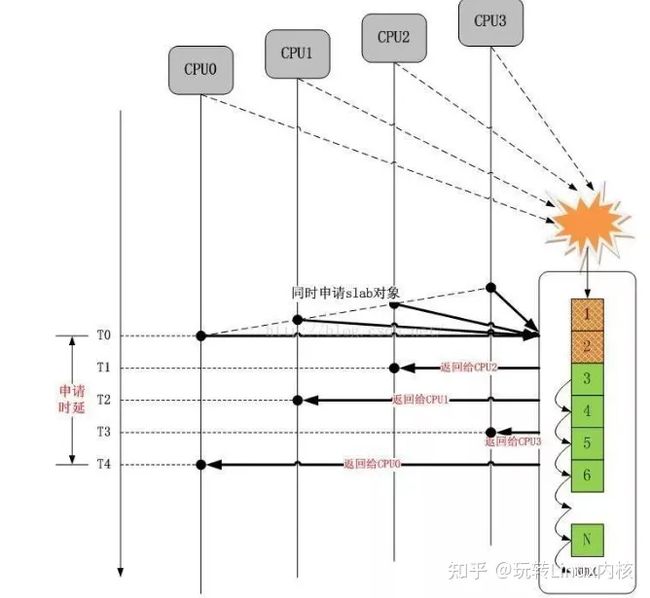
我们看到,在只有单一slab的时候,如果多个CPU同时分配对象,冲突是不可避免的,解决冲突的几乎是唯一的办法就是加锁排队,然而这将大大增加延迟,我们看到,申请单一对象的整个时延从T0开始,到T4结束,这太久了。
多CPU无锁化并行化操作的直接思路-复制给每个CPU一套相同的数据结构。
不二法门就是增加“每CPU变量”。对于slab而言,可以扩展成下面的样子:

如果以为这么简单就结束了,那这就太没有意义了。
内核资料直通车:最新Linux内核源码资料文档+视频资料 https://link.zhihu.com/?target=https%3A//docs.qq.com/doc/DTmFTc29xUGdNSnZ2
https://link.zhihu.com/?target=https%3A//docs.qq.com/doc/DTmFTc29xUGdNSnZ2
学习直通车:Linux内核源码/内存调优/文件系统/进程管理/设备驱动/网络协议栈https://link.zhihu.com/?target=https%3A//ke.qq.com/course/4032547%3FflowToken%3D1040236
问题
首先,我们来看一个简单的问题,如果单独的某个CPU的slab缓存没有对象可分配了,但是其它CPU的slab缓存仍有大量空闲对象的情况,如下图所示:
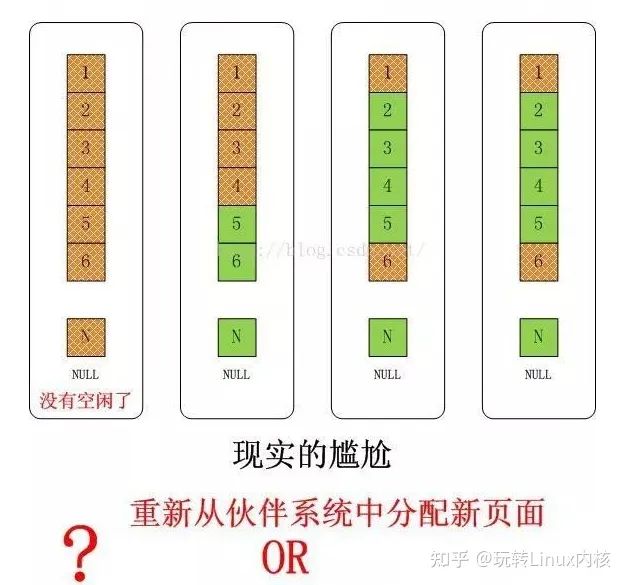
这是可能的,因为对单独一种slab的需求是和该CPU上执行的进程/线程紧密相关的,比如如果CPU0只处理网络,那么它就会对skb等数据结构有大量的需求,对于上图最后引出的问题,如果我们选择从伙伴系统中分配一个新的page(或者pages,取决于对象大小以及slab cache的order),那么久而久之就会造成slab在CPU间分布的不均衡,更可能会因此吃掉大量的物理内存,这都是不希望看到的。
在继续之前,首先要明确的是,我们需要在CPU间均衡slab,并且这些必须靠slab内部的机制自行完成,这个和进程在CPU间负载均衡是完全不同的,对进程而言,拥有一个核心调度机制,比如基于时间片,或者虚拟时钟的步进速率等,但是对于slab,完全取决于使用者自身,只要对象仍然在使用,就不能剥夺使用者继续使用的权利,除非使用者自己释放。因此slab的负载均衡必须设计成合作型的,而不是抢占式的。
好了。现在我们知道,从伙伴系统重新分配一个page(s)并不是一个好主意,它应该是最终的决定,在执行它之前,首先要试一下别的路线。
现在,我们引出第二个问题,如下图所示:
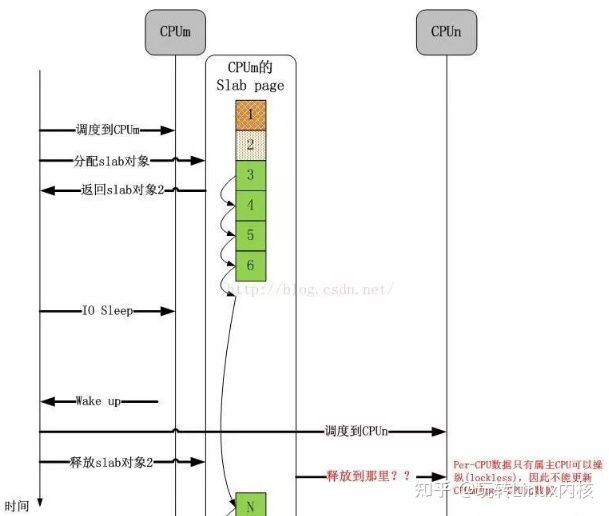
谁也不能保证分配slab对象的CPU和释放slab对象的CPU是同一个CPU,谁也不能保证一个CPU在一个slab对象的生命周期内没有分配新的page(s),这期间的复杂操作谁也没有规定。这些问题该怎么解决呢?事实上,理解了这些问题是怎么解决的,一个slab框架就彻底理解了。
问题的解决-分层slab cache
如果一个CPU的slab缓存满了,直接去抢同级别的别的CPU的slab缓存被认为是一种鲁莽且不道义的做法。那么为何不设置另外一个slab缓存,获取它里面的对象不像直接获取CPU的slab缓存那么简单且直接,但是难度却又不大,只是稍微增加一点消耗,这不是很好吗?事实上,CPU的L1,L2,L3 cache不就是这个方案设计的吗?这事实上已经成为cache设计的不二法门。这个设计思想同样作用于slab,就是Linux内核的slub实现。
现在可以给出概念和解释了:
- Linux kernel slab cache:一个分为3层的对象cache模型。
- Level 1 slab cache:一个空闲对象链表,每个CPU一个的独享cache,分配释放对象无需加锁。
- Level 2 slab cache:一个空闲对象链表,每个CPU一个的共享page(s) cache,分配释放对象时仅需要锁住该page(s),与Level 1 slab cache互斥,不互相包容。
- Level 3 slab cache:一个page(s)链表,每个NUMA NODE的所有CPU共享的cache,单位为page(s),获取后被提升到对应CPU的Level 1 slab cache,同时该page(s)作为Level 2的共享page(s)存在。
- 共享page(s):该page(s)被一个或者多个CPU占有,每一个CPU在该page(s)上都可以拥有互相不充图的空闲对象链表,该page(s)拥有一个唯一的Level 2 slab cache空闲链表,该链表与上述一个或多个Level 1 slab cache空闲链表亦不冲突,多个CPU获取该Level 2 slab cache时必须争抢,获取后可以将该链表提升成自己的Level 1 slab cache。
该slab cache的图示如下:

2个场景
对于常规的对象分配过程,下图展示了其细节:

事实上,对于多个CPU共享一个page(s)的情况,还可以有另一种玩法
伙伴系统
前面我们简短的体会了Linux内核的slab设计,不宜过长,太长了不易理解.但是最后,如果Level 3也没有获取page(s),那么最终会落到终极的伙伴系统。
伙伴系统是为了防止内存分配碎片化的,所以它尽可能地做两件事:
- 1).尽量分配尽可能大的内存
- 2).尽量合并连续的小块内存成一块大内存
注意,本文是关于优化的,不是伙伴系统的科普,所以我假设大家已经理解了伙伴系统。
鉴于slab缓存对象大多数都是不超过1个页面的小结构(不仅仅slab系统,超过1个页面的内存需求相比1个页面的内存需求,很少),因此会有大量的针对1个页面的内存分配需求。从伙伴系统的分配原理可知,如果持续大量分配单一页面,会有大量的order大于0的页面分裂成单一页面,在单核心CPU上,这不是问题,但是在多核心CPU上,由于每一个CPU都会进行此类分配,而伙伴系统的分裂,合并操作会涉及大量的链表操作,这个锁开销是巨大的,因此需要优化!
Linux内核对伙伴系统针对单一页面的分配需求采取的批量分配“每CPU单一页面缓存”的方式!
每一个CPU拥有一个单一页面缓存池,需要单一页面的时候,可以无需加锁从当前CPU对应的页面池中获取页面。而当池中页面不足时,系统会批量从伙伴系统中拉取一堆页面到池中,反过来,在单一页面释放的时候,会择优将其释放到每CPU的单一页面缓存中。
为了维持“每CPU单一页面缓存”中页面的数量不会太多或太少(太多会影响伙伴系统,太少会影响CPU的需求),系统保持了两个值,当缓存页面数量低于low值的时候,便从伙伴系统中批量获取页面到池中,而当缓存页面数量大于high的时候,便会释放一些页面到伙伴系统中。
小结
多CPU操作系统内核中,关键的开销就是锁的开销。我认为这是一开始的设计导致的,因为一开始,多核CPU并没有出现,单核CPU上的共享保护几乎都是可以用“禁中断”,“禁抢占”来简单实现的,到了多核时代,操作系统同样简单平移到了新的平台,因此同步操作是在单核的基础上后来添加的。简单来讲,目前的主流操作系统都是在单核年代创造出来的,因此它们都是顺应单核环境的,对于多核环境,可能它们一开始的设计就有问题。
不管怎么说,优化操作的不二法门就是禁止或者尽量减少锁的操作。随之而来的思路就是为共享的关键数据结构创建"每CPU的缓存“,而这类缓存分为两种类型:
1).数据通路缓存。
比如路由表之类的数据结构,你可以用RCU锁来保护,当然如果为每一个CPU都创建一个本地路由表缓存,也是不错的,现在的问题是何时更新它们,因为所有的缓存都是平级的,因此一种批量同步的机制是必须的。
2).管理机制的缓存。
比如slab对象缓存这类,其生命周期完全取决于使用者,因此不存在同步问题,然而却存在管理问题。采用分级cache的思想是好的,这个非常类似于CPU的L1/L2/L3缓存,采用这种平滑的开销逐渐增大,容量逐渐增大的机制,并配合以设计良好的换入/换出等算法,效果是非常明显的。