最通俗易懂的PID讲解(控制原理详解及作用分析)
目录
一:PID的基本定义
二:我们为什么要使用这个算法?
三:P,I,D参数如何控制闭环?
1.P值的作用
2.D值的作用:
3.I值的作用:
四:程序
前言:看了看很多大佬写的PID讲解很全面也很复杂,实在是不适合很多萌新入坑,所以想按自己的理解写一篇通俗易懂的PID算法讲解
一:PID的基本定义
PID,就是“比例(proportional)、积分(integral)、微分(derivative)”,是一种很 常见的控制算法。常见的PID算法,位置式PID,增量式PID,串级PID等。
二:我们为什么要使用这个算法?
以电机转速为例子来解释,很多人应该都有这个疑惑,我控制转速,直接给电机输出一个PWM不就行了吗,假设我设置定时器的arr(自动重装载值)=1000-1,想让电机转慢一点,设置输出比较的PWM为200。我想让电机转的快一些,就给PWM输出1000,让电机全速旋转不就可以了吗?不停的进行测试,然后用编码器读取到电机当前的转速,记录下来,我就知道了电机的一个速度对应一个固定的PWM的值。大家有没有想过一个问题,电机随着使用时间的增加,电机的性能其实会发生变化,输出相同的PWM值,速度会和最开始测得的值是不一样的。我们有一辆小车(电机控制小车的速度),如果我改变小车的负重,根据生活中的常识,相同的输出电压下,负载越重,小车的速度越慢的,那么前面记录的数据都不成立了。所以说仅仅输出一个PWM值,是不能精确控制电机转动的速度保持在相同的值。这个时候PID的算法就会体现出重要的作用。现在,我用一个编码器来读取电机速度(编码器可以精确读取电机的转动速度),编码器的作用就是把电机转动的速度(模拟量)转化为一个数字量,传入到我们的微处理器。我们使用PID算法本质上是为了让编码器的值(即速度)稳定在一个值。 PID调参变成了如何让编码器的值(速度)保持在一个固定值。
三:P,I,D参数如何控制闭环?
我们的PID处理的函数,使用的C语言,函数中有两个入口参数,一个是编码器测量到当前的速度值(程序中使用position代替),另一个就是我们想达到的速度值(程序中使用target代替)。
1.P值的作用
如果当前的速度值和目标的速度值相差很大,我们就想增大电机的PWM输出,让电机快速达到目标值,PID中的P就扮演着重要的作用,这里的P我使用Position_KP代替,可以联想到PWM=Position_KP*(target-position),当前的速度值和目标的速度值相差越大,输出的PWM值就会越大,可以快速达到目标速度值。
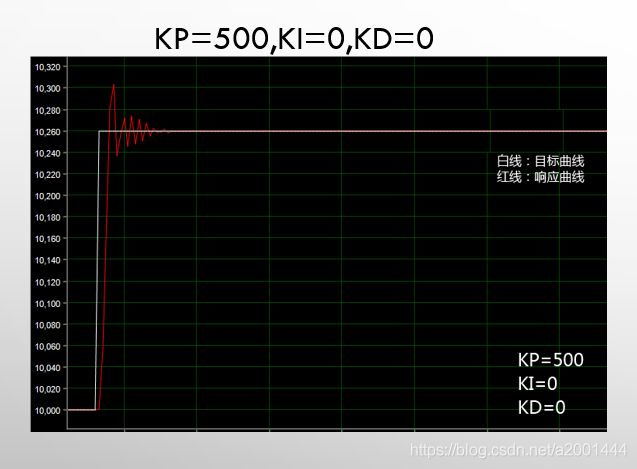
下面的图显示的就是P值较大时的情况:
这个是P值较小的情况:
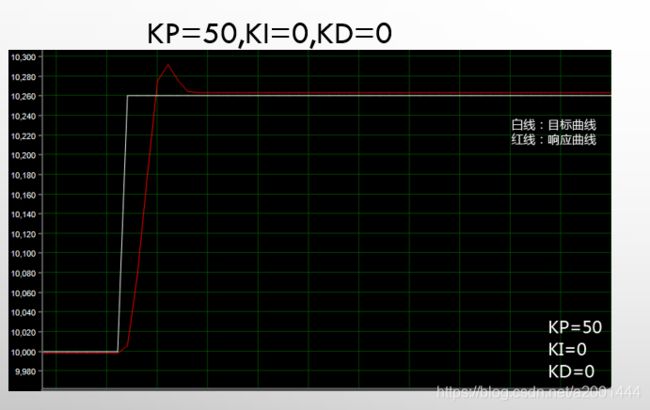
P值较小的情况下,可以发现响应速度变慢了,P值较大的情况下,虽然响应速度比较快,但是振荡很严重。
2.D值的作用:
出现振荡的时候我们就想去抑制振荡,如何抑制振荡呢?PID中的D的作用就体现出来了。当比较接近目标时,P的控制作用就比较小了。越接近目标,P的作用越温柔。有很多内在的或者外部的因素,使控制量发生小范围的摆动。D的作用就是让物理量的速度趋于0,只要什么时候,这个量具有了速度,D就向相反的方向用力,尽力抑制住振荡的变化。在自动控制原理这门学科中会提到专业的名词。现在我们引入偏差值的概念,令Bias=taget-position,令上一次求得的偏差值为Last_Bias。D项的计算公式为Position_KD*(Bias-Last_Bias)
我用带入值的方法来解释D的作用:现在让当前的速度值为90,目标值为100,Bias=10。现在是为了接近目标值,所以D项的结果是增加PWM。现在增加后的速度变成了105,Bias=-5,Last_Bias=10,Bias-Last_Bias=-15,如果增加后的速度为110,Bias=-10,Last_Bias=10,Bias-Last_Bias=-20,D项的计算结果是为了减小PWM,快速抑制住PWM的过量增加,超过目标值越多,那么抑制能力越厉害。
3.I值的作用:
PID中的I的作用是为了消除静差,静差就是指,稳定状态下当前值和目标值的差为了让大家更清楚理解I的概念,之前看到一个很有趣的例子,这里借鉴一下:
假如有个人把我们的加热装置带到了非常冷的地方,开始烧水了。需要烧到50℃。
在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?
- P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。
- D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。
于是,水温永远地停留在45℃,永远到不了50℃。
作为一个人,根据常识,我们知道,应该进一步增加加热的功率。可是增加多少该如何计算呢?
设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
这样一来,即使45℃和50℃相差不太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加。系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!
到了目标温度后,假设温度没有波动,积分值就不会再变动。这时,加热功率仍然等于散热功率。但是,温度是稳稳的50℃。
kI的值越大,积分时乘的系数就越大,积分效果越明显。
四:程序
/**************************************************************************
函数功能:位置式PID控制器
入口参数:编码器测量位置信息,目标位置
返回 值:电机PWM
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
**************************************************************************/
int Position_PID (int position,int target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=target-position; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias); //位置式PID控制器
Last_Bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}下面是增量式PID的具体执行程序:
/**************************************************************************
函数功能:增量PI控制器
入口参数:编码器测量值,目标速度
返回 值:电机PWM
根据增量式离散PID公式
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
pwm代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)
**************************************************************************/
int Incremental_PI (int Encoder,int Target)
{
static float Bias,Pwm,Last_bias;
Bias=Target-Encoder; //计算偏差
Pwm+=Velocity_KP*(Bias-Last_bias)+Velocity_KI*Bias; //增量式PI控制器
Last_bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}以上就是让小车速度保持目标值的算法分析
PID参数的调整方法啊,后续会更新
码字不易,转载请注明出处,有不足的地方欢迎大家留言!
电机驱动原理详解