【论文阅读笔记】里程计ODO/INS不同融合方式的性能比较
文章目录
-
- 一、里程计的工作原理
- 二、论文中的主要结论
- 三、总结
- 四、参考文献
欢迎关注个人公众号:导航员学习札记
关于里程计的融合一般用“距离增量修正”和“速度修正”两种方式。我最近在想这两种方式在性能上有什么不同,因此找了两篇论文来看。本文主要是整理了武汉大学i2Nav团队、上海交大武元新老师团队关于里程计融合的论文中的结论。
一、里程计的工作原理
里程计一般会用在机器人或者汽车上,轮子每转动一周,里程计会输出N个脉冲,因此根据脉冲个数以及轮子的半径,就可以得到轮子走过的距离。
由于在计算距离时我们只能统计整数个脉冲,因此里程计的精度和轮子转一周输出的脉冲个数有关,理论上转一周输出的脉冲越多,精度也就越高。一般融合里程计还需要考虑下面三项参数:
- 由于轮子胎压的变化等,可能会导致里程计刻度系数变化,因此需要估计里程计的刻度系数
- 由于里程计和IMU的安装位置不同,杆臂的存在导致转弯时两者速度、走过的距离不同,因此需要估计或者事先测量杆臂值
- 由于实际中IMU的安装无法完全和车身坐标系重合,因此需要考虑安装误差
当然如果轮子出现打滑等情况,里程计的输出就不能真实地反映轮子走过距离,此时也会存在一定误差。
二、论文中的主要结论
1. 《INS/Odometer Land Navigation by Accurate Measurement Modeling and Multiple-Model Adaptive Estimation》 by 上海交大武元新老师 团队
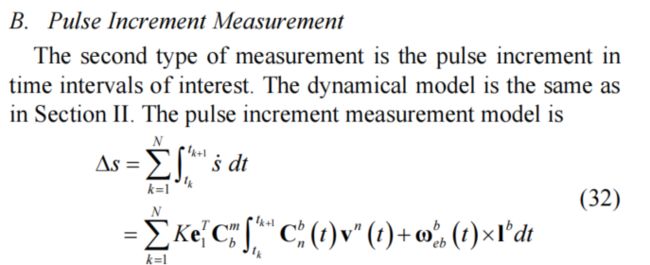
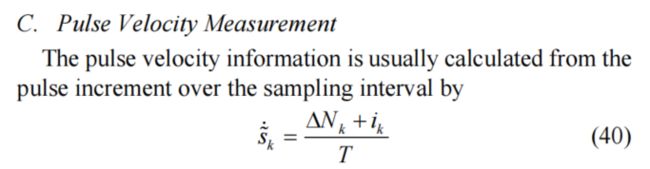
论文内容及结论:如下面公式所示,文章对比了三种融合方式:脉冲累积量、脉冲增量、脉冲速度。作者经过仿真和实际测试认为用速度融合的方式性能最优。
个人观点:论文虽然用仿真和实际数据证明速度融合最优,但是似乎没有从理论的角度来探讨为何这种融合更优(也有可能我漏看了),会不会是因为在计算速度时,预先用了另一个卡尔曼滤波器来降低速度噪声?
![]()

2. 《轮式机器人定位中ODO/NHC的两种测量模型的精度和鲁棒性研究》 by 武汉大学i2Nav 团队
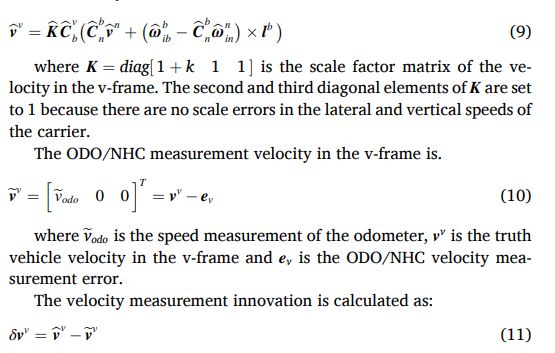
论文内容及结论:论文中针对了三种场景(载体震动测试,急停测试、过减速带测试)进行了轮式机器人的里程计融合测试。融合方式分别是速度融合和距离增量融合,如下图所示。研究表明:采用距离增量修正(包括ODO和NHC)比传统的速度修正的组合导航精度更高,稳健性也更好,尤其是对小型轮式机器人这种不精密载体[1]。主要原因是结构相对简单粗糙的轮式机器人相比于结构精密的汽车,工作时的震动和颠簸更严重,其运动学模型更容易被破坏。
个人观点:论文也是主要从测试出发来验证结论,理论上可以说是由于震动等使得车辆运动学模型破坏。不过我个人对震动如何破坏运动学模型还不是很明白。



三、总结
两篇论文针对不同载体,分别得到了“速度融合更优”和“距离增量融合更优”的结果。下面是个人的观点,可能说的不对,欢迎指正:不考虑特殊情况,从理论上来看,两种融合方式应该不会有较大的精度区别,尤其是在里程计测量频率较高、精度较高的情况下。因为速度并没有比距离增量多更多的信息,两者的信息几乎是等价的。也许在某些特定的情况下(比如某种原因运动学模型破坏),某种方式可能会更优。
四、参考文献
[1]. L. Wang, X. Niu, T. Zhang, H. Tang, and Q. Chen, “Accuracy and robustness of ODO/NHC measurement models for wheeled robot positioning,”Measurement, vol. 201, p. 111720, Sep. 2022, doi: 10.1016/j.measurement.2022.111720.
[2]. W. Ouyang, Y. Wu, and H. Chen, “INS/Odometer Land Navigation by Accurate Measurement Modeling and Multiple-Model Adaptive Estimation,” IEEE Trans. Aerosp. Electron. Syst., vol. 57, no. 1, pp. 245–262, Feb. 2021, doi: 10.1109/TAES.2020.3011998.