蓝桥杯单片机第14届省赛模拟程序题参考答案
目录
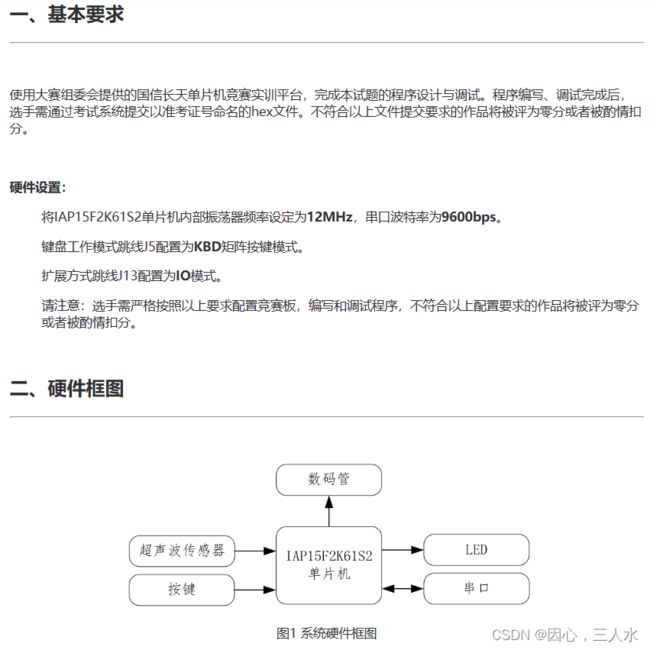
题目
题目解析
串口初始化配置
源码
main.h
main.c
Init.h
Init.c
SMG.h
SMG.c
DSQ.h
DSQ.c
YanShi.h
YanShi.c
JZKey.h
JZKey.c
CSB.h
CSB.c
ChuanKou.h
ChuanKou.c
题目


题目解析
这套模拟题考了一个非常非常不常考的外设——串口。但是串口模块的代码也不难,可以在网上参考一下,串口的初始化也可以使用stc-isp烧录软件进行配置。
串口初始化配置
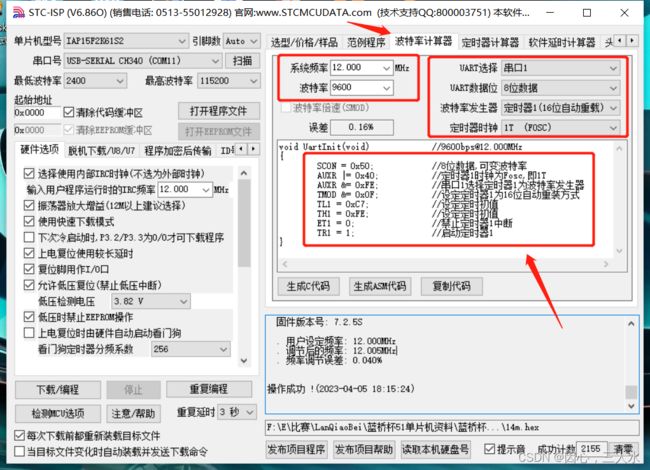
一份串口初始化代码,轻轻松松到手。
源码
main.h
#ifndef __MAIN_H_
#define __MAIN_H_
#define uchar unsigned char
#define uint unsigned int
#include
#include
#include
#include "Init.h"
#include "SMG.h"
#include "DSQ.h"
#include "YanShi.h"
#include "JZKey.h"
#include "CSB.h"
#include "ChuanKou.h"
void LED_Show();
#endif main.c
#include "main.h"
uchar key_num=0;
uchar key_num_old=0;
uchar JieMian=0;//界面。0:距离显示界面;1:参数显示界面
int JuLi_CanShu=30;//距离参数
uint ju_li=0;//距离
uchar date[50];
uchar L3_flag=0;
uint L3_time=0;
uchar ji_li_time=0;
void main(){
Init_BZ();
SMG_Init();
ChuanKou_Init();
DSQ_2_Init();
JZKey_Init();
while(1){
key_num_old=key_num;
key_num=JZKEy_GetKeynum();
if(key_num_old!=key_num){
if(key_num==4){
JieMian++;
JieMian=JieMian%2;
}
else if(key_num==8&&JieMian==0){
JuLi_CanShu=ju_li;
}
else if(key_num==12&&JieMian==1){
JuLi_CanShu=JuLi_CanShu+10;
if(JuLi_CanShu>=999){
JuLi_CanShu=999;
}
}
else if(key_num==16&&JieMian==1){
JuLi_CanShu=JuLi_CanShu-10;
if(JuLi_CanShu<=0){
JuLi_CanShu=0;
}
}
else if(key_num==9){
sprintf(date,"Distance;%dcm\n",ju_li);
SendString(&date);
memset(&date,'\0',sizeof(date));
}
}
if(ji_li_time>=50){
ju_li=CSB_GetJuLi();
ji_li_time=0;
}
}
}
void DSQ_2_ZD() interrupt 12{
ji_li_time++;
if(JieMian){
if(JuLi_CanShu>=100){
SMG_Show(25,2,16,16,16,JuLi_CanShu/100,(JuLi_CanShu/10)%10,JuLi_CanShu%10);
}
else if(JuLi_CanShu>=10){
SMG_Show(25,2,16,16,16,16,JuLi_CanShu/10,JuLi_CanShu%10);
}
else if(JuLi_CanShu>=0){
SMG_Show(25,2,16,16,16,16,16,JuLi_CanShu);
}
}
else{
if(ju_li>=100){
SMG_Show(25,1,16,16,16,ju_li/100,(ju_li/10)%10,ju_li%10);
}
else if(ju_li>=10){
SMG_Show(25,1,16,16,16,16,ju_li/10,ju_li%10);
}
else if(ju_li>=0){
SMG_Show(25,1,16,16,16,16,16,ju_li);
}
}
if(ju_li>JuLi_CanShu){
L3_time++;
L3_flag=1;
if(L3_time>=400){
L3_time=0;
}
}
else{
L3_time=0;
L3_flag=0;
}
LED_Show();
}
void LED_Show(){
uchar L1_2=0xff;
uchar L3=0xff;
if(JieMian){
L1_2=0xfd;
}
else{
L1_2=0xfe;
}
if(L3_flag){
if(L3_time<200){
L3=0xfb;
}
}
P0=L1_2&L3;
P2=(P2&0x1f)|0x80;
P2=(P2&0x1f)|0x00;
}Init.h
#ifndef __INIT_H_
#define __INIT_H_
#include
void Init_BZ();
#endif Init.c
#include "Init.h"
void Init_BZ(){
P2=(P2&0x1f)|0xa0;
P0=0x00;
P2=(P2&0x1f)|0x80;
P0=0xff;
}SMG.h
#ifndef __SMG_H_
#define __SMG_H_
#include
void SMG_Init();
void SMG_Show(unsigned char n1,n2,n3,n4,n5,n6,n7,n8);
#endif SMG.c
#include "SMG.h"
unsigned char code t_display[]={ //????
// 0 1 2 3 4 5 6 7 8 9 A B C D E F
0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x79,0x71,
//black - H J K L N o P U t G Q r M y
0x00,0x40,0x76,0x1E,0x70,0x38,0x37,0x5C,0x73,0x3E,0x78,0x3d,0x67,0x50,0x37,0x6e,
0xBF,0x86,0xDB,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF,0x46}; //0. 1. 2. 3. 4. 5. 6. 7. 8. 9. -1
void SMG_Init(){
P2=(P2&0x1f)|0xc0;
P0=0xff;
P2=(P2&0x1f)|0xe0;
P0=0xff;
}
void SMG_Show(unsigned char n1,n2,n3,n4,n5,n6,n7,n8){
static unsigned char i=0;
i++;
i=i%8;
P2=(P2&0x1f)|0xc0;
switch(i){
case 1:{
P0=0x01;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n1];
break;
}
case 2:{
P0=0x02;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n2];
break;
}
case 3:{
P0=0x04;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n3];
break;
}
case 4:{
P0=0x08;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n4];
break;
}
case 5:{
P0=0x10;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n5];
break;
}
case 6:{
P0=0x20;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n6];
break;
}
case 7:{
P0=0x40;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n7];
break;
}
case 0:{
P0=0x80;
P2=(P2&0x1f)|0xe0;
P0=~t_display[n8];
break;
}
}
P2=(P2&0x1f)|0x00;
}DSQ.h
#ifndef __DSQ_H_
#define __DSQ_H_
#include
void DSQ_2_Init();
#endif DSQ.c
#include "DSQ.h"
void DSQ_2_Init(){
AUXR |= 0x04; //定时器时钟1T模式
T2L = 0x20; //设置定时初值
T2H = 0xD1; //设置定时初值
AUXR |= 0x10; //定时器2开始计时
AUXR=AUXR&0xf7;
IE2=IE2|0x04;
EA=1;
}YanShi.h
#ifndef __YANSHI_H_
#define __YANSHI_H_
#include
#include "intrins.h"
void Delay10ms();
#endif YanShi.c
#include "YanShi.h"
void Delay10ms() //@12.000MHz
{
unsigned char i, j;
i = 117;
j = 184;
do
{
while (--j);
} while (--i);
}
JZKey.h
#ifndef __JZKEY_H_
#define __JZKEY_H_
#include "YanShi.h"
void JZKey_Init();
unsigned char JZKEy_GetKeynum();
#endifJZKey.c
#include "JZKey.h"
void JZKey_Init(){
P32=1;
P33=1;
P34=0;
P35=0;
P42=0;
P44=0;
}
unsigned char JZKEy_GetKeynum(){
unsigned char key_num=0;
if(P32==0){
P32=0;
P42=1;
if(P42==0){
Delay10ms();
if(P42==0){
key_num=9;
}
//while(P42==0);
}
}
else if(P33==0){
P33=0;
P34=1;
P35=1;
P42=1;
P44=1;
if(P34==0){
Delay10ms();
if(P34==0){
key_num=16;
}
//while(P34==0);
}
else if(P35==0){
Delay10ms();
if(P35==0){
key_num=12;
}
//while(P35==0);
}
else if(P42==0){
Delay10ms();
if(P42==0){
key_num=8;
}
//while(P42==0);
}
else if(P44==0){
Delay10ms();
if(P44==0){
key_num=4;
}
//while(P44==0);
}
}
JZKey_Init();
return key_num;
}CSB.h
#ifndef __CSB_H_
#define __CSB_H_
#include
#include "intrins.h"
#define FS P10
#define JS P11
void Delay13us();
void CSB_FS_MC();
float CSB_GetJuLi();
#endif CSB.c
#include "CSB.h"
void Delay13us() //@12.000MHz
{
unsigned char i;
_nop_();
_nop_();
i = 36;
while (--i);
}
void CSB_FS_MC(){
unsigned char i;
for(i=0;i<8;i++){
FS=1;
Delay13us();
FS=0;
Delay13us();
}
}
float CSB_GetJuLi(){
float ju_li;
unsigned int time=0;
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0=0;
TH0=0;
ET0=0;
TF0=0;
CSB_FS_MC();
TR0=1;
while(JS==1&&TF0==0);
TR0=0;
if(JS==0&&TF0==0){
time=((unsigned int)TH0<<8)|(unsigned int)TL0;
ju_li=(time*1.0*0.017)/12.0;
}
else{
ju_li=999.0;
TF0=0;
}
TH0=0;
TL0=0;
return ju_li;
}ChuanKou.h
#ifndef __CHUANKOU_H_
#define __CHUANKOU_H_
#include
void ChuanKou_Init();
void SendData(unsigned char date);
void SendString(char *s);
#endif ChuanKou.c
#include "ChuanKou.h"
void ChuanKou_Init(){
SCON = 0x50; //8位数据,可变波特率
AUXR |= 0x40; //定时器1时钟为Fosc,即1T
AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
TMOD &= 0x0F; //设定定时器1为16位自动重装方式
TL1 = 0xC7; //设定定时初值
TH1 = 0xFE; //设定定时初值
ET1 = 0; //禁止定时器1中断
TR1 = 1; //启动定时器1
ES=0;
EA=1;
}
void SendData(unsigned char date){
SBUF=date;
while(TI==0);
TI=0;
}
void SendString(unsigned char *s){
while (*s!='\0'){//检测字符串结束标志
SendData(*s++);//发送当前字符
}
}