线段树原理及总结
一、概述
线段树是一种在线算法,它在各个节点保存一条线段(数组中的一段子数组),主要用于高效解决连续区间的动态查询问题,由于二叉结构的特性,它基本能保持每个操作的复杂度为O(logn)。
二、原理分析及代码实现
我们从一个经典的例子来了解线段树,问题描如下:从数组arr[0...n-1]中查找某个数组某个区间内的最小值,数组中的元素的值可以随时更新。这使我们非常困扰,因为当数组非常大的时候,就很容易TLE,所以我们亟待一种相对高效的算法,线段树应运而生。
1,建树。
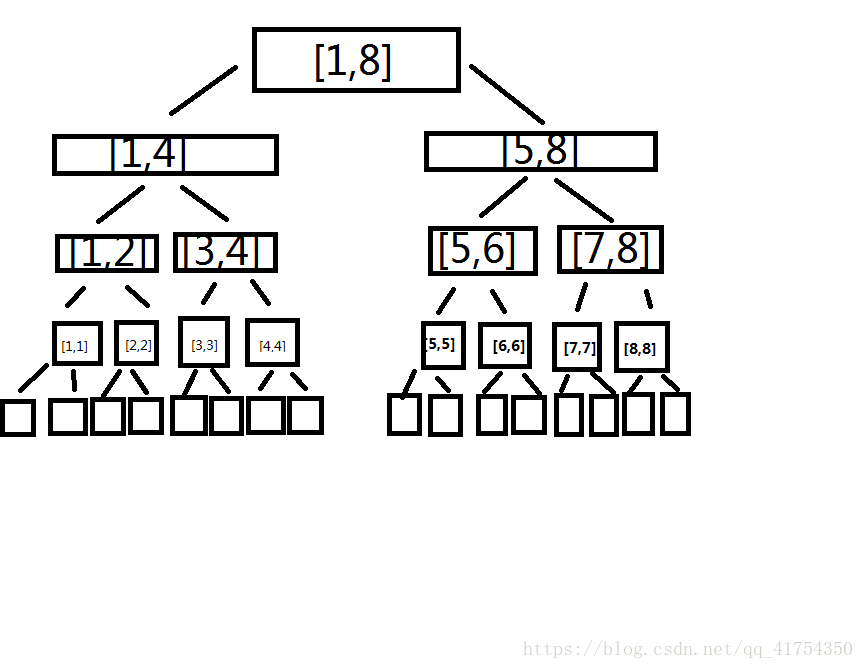
假如我们要对8个数据进行管理,我们就要建立一个线段树。建立的线段树是一个完全二叉树,我们需要借助一个二叉树的性质:
父亲的区间是[a,b],(c=(a+b)/2)左儿子的区间是[a,c],右儿子的区间是[c+1,b],所以线段树需要的空间为数组大小的四倍。
函数声明(我们需要根节点,左右两个儿子),如果到底了,本节点就等于要记载的数组的节点并返回,这也是递归的边界条件,接下来利用性质构筑左右子树mid=(left+right)/2;build(2*root,left,mid);build(2*root+1,mid+1,right),递归完成后,父节点更新。
2、单点更新
现在树已经建立完毕,但这还是刚刚开始的存图环节,假如说现在我们要使一个节点更新,比如让第三个数所对应的arr【3】+5,会产生“牵一发而动全身”的效应,所以们们需要对它上面的节点再次更新。
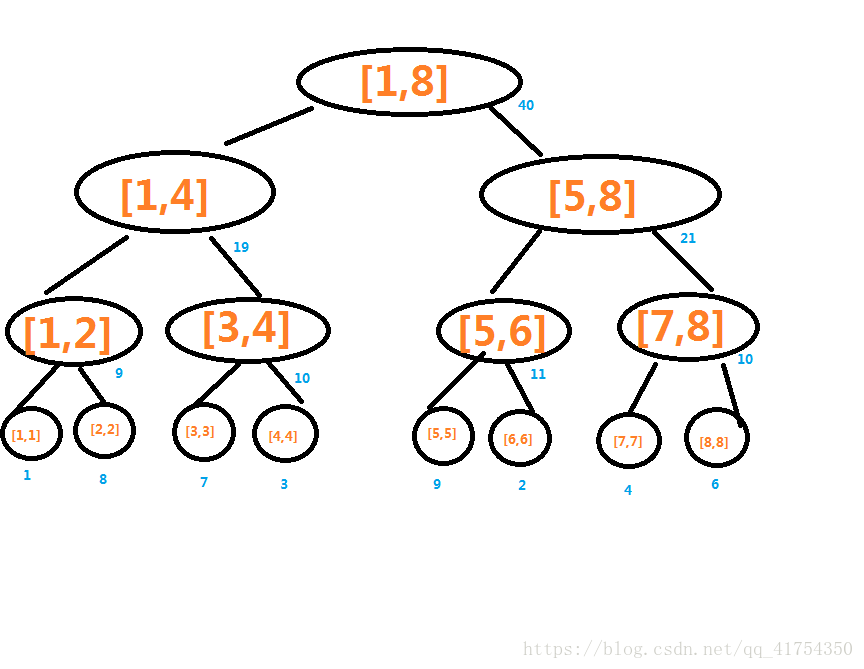
假如arr【1-8】为 1,8,7,3,9,2,4,6 如图所示:
我们要对数组3加上一个5,要达到以下结果。

我们需要对每一个节点更新,使用的数据有本次的根节点,要控制的总范围区间(左,右),要修改的点和要修改的数据。持续更新它的父节点直到顶端即可。
3,区间更新
区间更新是个大问题,很多同学会想到用一个for循环,每个点走一遍。虽说思维难度不大,而且在点与点范围跳跃速度也不慢,但当要修改的数据到达一定规模时,这样重复的操作显得累赘而消耗巨量时间,非常容易TLE。所以我们需要找到之间重复的规律,简化程序,以减少不必要的时间浪费。
于是我们想到了一个方法,引入一个延迟标记。原理是在要修改的区间(有时候是全部,有时候是中间的一部分被完全包括),在不使用它的子孙时,暂且将数据扣留下来,于父亲产生影响,并施加一个延迟标记。有了整个关键方法,我们可以建立一个更新函数,首先先判断它的边界问题,
举个例子,还是那个图,我们假如说要将arr[2-5]都要加上5,如下图所示,
我们首先将其与[1,8]进行比较,发现所更改范围在【1,8】之内,我们往下搜索左右子树,发现【1,4】和【5,8】之中都有。先看【1,4】,先搜索它的左子树【1,2】,发现只有2需要,1不需要,所以直接让右子树2所对应的值8+5,返回,返回,至【1,4】。再看右子树【3,4】,发现这全都在更改的范围之内,所以我们在这里加入一个延迟标记并且【3,4】它本身获得它的子树那么多的增加,将扣押下来的值存储在延迟标记,需要的时候再将其放下。然后再看右子树【5,8】,然后引导至【5,6】,【6,6】直接+5就可以了。

现在我们具体来解释一下延迟标记的原理,提需要接收的信息有本次根节点和左右子树。这是一个更新的例行检查,加入一判定这里有延迟标记,便会产生释放,将数据变动载入真实数组。我们意识到一个严重的问题:假如说产生了多组延迟标记,甚至运算符号不同,这样就会陷入巨大的混乱。说是多次加减,或多次乘除,可直接对延迟标记进行操作。但是假如为加减乘除混合运算,恐怕难以清晰实现,依个人愚见,有两种办法:1、当标记种类较少时,可进行种类判定2、当过于复杂时,不必多种标记分类,不如返璞归真,将上一次标记释放之后在进行新一次的标记。
5、查询
对于查询问题,是比较容易的一块,他需要接受的信息有,根节点,要实施更新的大环境(左,右),查询的区间(左,右)。首先假如不在就直接返回,假如查询包括了环境范围,就直接利用父节点值,有需要释放的延迟标记就释放,要向下调查左右节点就调查。一切就完毕了。
三、代码的统一展示
第一个是只有加法,第二个是有加法有乘法。
#include
#include
#include
using namespace std;
const long long maxn=900001;
long long arr[maxn];//实际数组
struct node
{
long long val;//他的节点价值
long long tag;//延迟标记
}tree[maxn];
long long root,n;
void build(long long root,long long al,long long ar)//建树
{
tree[root].tag=0;//将延迟标记初始化
if(al==ar)//如果到底了,就返回
{
tree[root].val=arr[al];//储存数组
return;
}
long long mid=(al+ar)/2;
build(2*root,al,mid);
build(2*root+1,mid+1,ar);//左右子树的建立
tree[root].val=tree[2*root].val+tree[2*root+1].val;//递归完毕后再往上更新父节点
}
void pushdown(long long root,long long start,long long end)//延迟标记
{
if(tree[root].tag!=0)//常规检查,有就释放
{
tree[2*root].tag+=tree[root].tag;//左分发下去延迟标记
tree[2*root+1].tag+=tree[root].tag;//右分发下去延迟标记
long long mid=(end+start)/2;
tree[root*2].val+=tree[root].tag*(mid-start+1);//向左下克扣数值
tree[root*2+1].val+=tree[root].tag*(end-mid);//向右下克扣数值
tree[root].tag=0;//清除自身标记
}
}
long long query(long long root,long long al,long long ar,long long ql,long long qr)//查询
{
if(qrar)//不在范围
return 0;//直接返回
if(al>=ql&&ar<=qr)//全在范围
return tree[root].val;//直接用值
pushdown(root,al,ar);//如果有延迟标记就清除
long long mid=(al+ar)/2;
return query(2*root,al,mid,ql,qr)+query(2*root+1,mid+1,ar,ql,qr);//左右子树查找
}
void update(long long root,long long al,long long ar,long long ul,long long ur,long long addval)//更新节点
{
if(ul>ar||ur=ul&&ar<=ur)//完全在则直接用延迟标记
{
tree[root].val+=addval*(ar-al+1);
tree[root].tag+=addval;
return;
}
pushdown(root,al,ar);//下放一次
long long mid=(al+ar)/2;
update(2*root,al,mid,ul,ur,addval);
update(2*root+1,mid+1,ar,ul,ur,addval);
tree[root].val=tree[2*root].val+tree[2*root+1].val;//向上更新
}
int main()
{
long long m;
scanf("%lld%lld",&n,&m);
for(long long i=1;i<=n;++i)
scanf("%lld",&arr[i]);
root=1;
build(1,1,n);
for(long long i=1;i<=m;++i)
{
long long x,ul,ur,addval;
scanf("%lld",&x);
if(x==1)//当x==1时,进行修改
{
scanf("%lld%lld%lld",&ul,&ur,&addval);
update(1,1,n,ul,ur,addval);
}
if(x==2)//当x==2时,进行查询
{
long long e,f;
scanf("%lld%lld",&e,&f);
printf("%lld\n",query(1,1,n,e,f));
}
}
} #include
#include
using namespace std;
//题目中给的p
int p;
//暂存数列的数组
long long a[100007];
//线段树结构体,v表示此时的答案,mul表示乘法意义上的lazytag,add是加法意义上的
struct node{
long long v, mul, add;
}st[400007];
//buildtree
void bt(int root, int l, int r){
//初始化lazytag
st[root].mul=1;
st[root].add=0;
if(l==r){
st[root].v=a[l];
}
else{
int m=(l+r)/2;
bt(root*2, l, m);
bt(root*2+1, m+1, r);
st[root].v=st[root*2].v+st[root*2+1].v;
}
st[root].v%=p;
return ;
}
//核心代码,维护lazytag
void pushdown(int root, int l, int r){
int m=(l+r)/2;
//根据我们规定的优先度,儿子的值=此刻儿子的值*爸爸的乘法lazytag+儿子的区间长度*爸爸的加法lazytag
st[root*2].v=(st[root*2].v*st[root].mul+st[root].add*(m-l+1))%p;
st[root*2+1].v=(st[root*2+1].v*st[root].mul+st[root].add*(r-m))%p;
//很好维护的lazytag
st[root*2].mul=(st[root*2].mul*st[root].mul)%p;
st[root*2+1].mul=(st[root*2+1].mul*st[root].mul)%p;
st[root*2].add=(st[root*2].add*st[root].mul+st[root].add)%p;
st[root*2+1].add=(st[root*2+1].add*st[root].mul+st[root].add)%p;
//把父节点的值初始化
st[root].mul=1;
st[root].add=0;
return ;
}
//update1,乘法,stdl此刻区间的左边,stdr此刻区间的右边,l给出的左边,r给出的右边
void ud1(int root, int stdl, int stdr, int l, int r, long long k){
//假如本区间和给出的区间没有交集
if(r