超像素分割学习笔记
学习目标
掌握超像素分割的原理、超像素分割方法的推导过程以及实现方法
1.1 超像素
超像素是指将具有相似纹理、颜色、亮度等特征的相邻像素聚合成某一个像素块,结合超像素的思想,这样可以使少量的像素块代替原本大量的像素。
目前超像素广泛应用于图像分割、目标识别等领域。
1.2 SLIC
SLIC(Simple Linear IterativeClustering,简单线性迭代聚类)是超像素分割中使用比较多的方法,主要特点(优点)如下:
1.基于LAB颜色空间
2.运行速度快,生成的超像素紧凑
3.思想比较简单
1.3 SLIC实现的具体步骤
1.初始化种子点
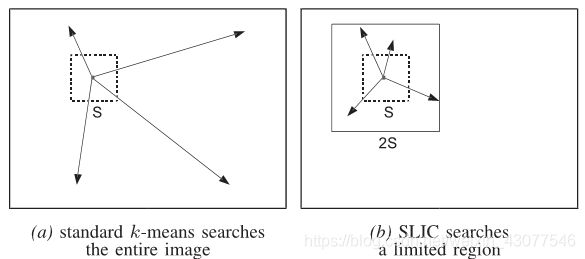
在图像内均匀分布种子点(与Kmeans不同)
若图像像素为N*N,预想分为K个像素块,则:
-
每个像素块的初始大小为 N ∗ N / K N*N/K N∗N/K
-
相邻种子点间的步长S为 N ∗ N / K \sqrt {N*N/K} N∗N/K(假设初始每个像素块的大小是均匀的)
2.重新选择种子点
结合图像中的梯度信息,在n*n邻域内重新选择种子点(一般n取3)。重新选择种子点是为了防止均匀初始化后的种子点处于边缘或是噪声,将种子点移动到梯度比较小的位置。
3.以各像素块种子点为中心更新标签
以超像素的种子点为中心,在其上下左右2S的范围内搜索(和Kmeans 不同,这里的搜索不是全局范围的)
4.计算距离
计算各像素点与种子点的距离,距离包括颜色距离与空间位置的距离。
颜色距离 d c d_c dc的计算方法如下:
l j − l i ) 2 + ( a i − a j ) 2 + ( b i − b j ) 2 \sqrt {l_j-l_i)^2+(a_i-a_j)^2+(b_i-b_j)^2} lj−li)2+(ai−aj)2+(bi−bj)2
空间距离 d s d_s ds的计算方法如下:
( x j − x i ) 2 + ( y i − y j ) 2 \sqrt {(x_j-x_i)^2+(y_i-y_j)^2} (xj−xi)2+(yi−yj)2
总距离 D D D的计算方法如下:
( d c m ) 2 + ( d s S ) 2 \sqrt {(\frac{d_c}{m})^2+(\frac{d_s}{S})^2} (mdc)2+(Sds)2
其中 m m m为常数,取值范围在[1,40],常以10代替
因为搜索范围在种子点的[-2S,2S]内,有些像素点会被重复搜索到,所以应该同时记录距离,最终取最小值对应的种子点作为其聚类中心
将上述3-4过程不断迭代,一直到满足最大迭代次数或者中心种子点不再发生变化为止。
5.增强连通性
经过迭代之后有可能会出现过分割、多连通、单个超像素被分割成多个不连续的超像素等,需要增强连通性
主要思路是:新建一张标记表,表内元素均为-1,按照“Z”型走向(从左到右,从上到下顺序)将不连续的超像素、尺寸过小超像素重新分配给邻近的超像素,遍历过的像素点分配给相应的标签,直到所有点遍历完毕为止
2 实战
import cv2
import numpy as np
from skimage import img_as_float
import matplotlib.pyplot as plt
1.初始化种子点
def init_cluster(pic,n_segments):
cluster_w,cluster_h=int(cluster_S/2),int(cluster_S/2) #计算出每个的长和宽
center={}
i=0
while cluster_h<pic.shape[0]: #shape[0]是高度
while cluster_w<pic.shape[1]:
center[i]=[cluster_w,cluster_h,pic[cluster_w,cluster_h,0],pic[cluster_w,cluster_h,1],pic[cluster_w,cluster_h,2]]
cluster_w=cluster_w+cluster_S
i=i+1
cluster_w=int(cluster_S/2)
cluster_h=cluster_h+cluster_S
return center
2.计算梯度
def caculate_grad(w,h):
if h+1>=pic.shape[0] or w+1>=pic.shape[1]:
w=w-2
h=h-2
grad=np.sum(pic[w+1,h+1,:]-pic[w,h,:])
return grad
3.在3*3邻域内根据计算得到的梯度,更新种子点
def update_center(center):#更新中心点
for i in range(0,len(center)):
w,h=center[i][0],center[i][1]
now_grad=caculate_grad(w,h) #计算当前的梯度
for dw in range(-1,2): #在3*3邻域内
for dh in range(-1,2):
new_grad=caculate_grad(w+dw,h+dh) #计算新梯度
if new_grad<now_grad:
now_grad=new_grad
center[i]=[w+dw,h+dh,pic[w+dw,h+dh,0],pic[w+dw,h+dh,1],pic[w+dw,h+dh,2]]
return center
4.可视化种子点
def draw_center(center)
for i in range(0,len(center)):
cv2.circle(ori_pic,(center[i][0],center[i][1]),1, (255, 0, 0),4) #将初始化中心标出来
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
ax.imshow(ori_pic)
plt.show()
n_segments=50
ori_pic=cv2.imread('Lenna.png')
ori_pic=cv2.cvtColor(ori_pic,cv2.COLOR_BGR2RGB)
pic=cv2.cvtColor(ori_pic,cv2.COLOR_BGR2LAB)
cluster_shape=pic.shape[0]*pic.shape[1]/n_segments #每个超像素块中包含的像素数
cluster_S=int(np.sqrt(cluster_shape)) #超像素块的长/宽/初始种子点之间的距离(假设形状规则)
center=init_cluster(pic,n_segments) #初始化中心
center=update_center(center) #更新中心,避免中心在梯度高(噪声点等)
draw_center(center) #可视化初始中心点
得到初始的种子点(已经进行了梯度更新,可以看出中心点分布不是绝对均匀)

5.初始化距离矩阵(用来存储每个像素点与其中心点间的距离)
def init_distance():
distance=[]
for i in range(pic.shape[0]):
distance_item=[np.inf for j in range(pic.shape[1])]
distance.append(distance_item)
return distance
7.初始化像素矩阵(用来记录每个像素块中包含的具体像素位置)
def init_pixel():
pixel={}
for i in range(0,len(center)):
pixel[i]=[]
return pixel
8.计算某像素与其种子点之间的距离(这里M取10)
def caculate_distance(w_,h_,center_):#根据颜色空间和像素位置进行更新
color_dic=np.sqrt(np.sum(np.square(pic[w_,h_,:]-np.array(center_[2:]))))
geo_dic=np.sqrt(np.sum(np.square(np.array([w_,h_])-np.array(center_[:2]))))
dis=np.sqrt(np.square(color_dic/10)+np.square(geo_dic/cluster_S))
return dis
9.计算各个像素点所属的标签(即所属种子点)
def get_cluster(center,distance,label,pixel):
for i in range(0,len(center)):
for dw in range(center[i][0]-2*cluster_S,center[i][0]+2*cluster_S): #在2S范围内
if dw<0 or dw>=pic.shape[0]: continue
for dh in range(center[i][1]-2*cluster_S,center[i][1]+2*cluster_S):
if dh<0 or dh>=pic.shape[1]: continue
dis=caculate_distance(dw,dh,center[i])#计算距离
if dis<distance[dw][dh]:
distance[dw][dh]=dis
label[(dw,dh)]=center[i] #记录当前的中心点
for j in list(pixel.values()):
if(dw,dh) in j:#若该像素点之前已经隶属于某个中心,需要先将其去掉,再添加至新的中心
j.remove((dw,dh))
pixel[i].append((dw,dh))
return label,distance,pixel
10.更新各超像素的中心(所属种子点)
def update_cluster(center,pixel):#更新中心
for i,item in enumerate(pixel.values()): #{1:[(),()]
w,h=0,0
for j in item:
w+=j[0]
h+=j[1]
center_w=int(w/len(item))
center_h=int(h/len(item))
center[i]=[center_w,center_h,pic[center_w,center_h,0],pic[center_w,center_h,1],pic[center_w,center_h,2]]
return center
11.可视化超像素分割结果
def save_cluster(center,pixel):
image_arr = np.copy(ori_pic)
for i,item in enumerate(pixel.values()): #{1:[(),()]
for j in item:
image_arr[j[0],j[1],0]=image_arr[center[i][0],center[i][1],0]
image_arr[j[0],j[1],1]=image_arr[center[i][0],center[i][1],1]
image_arr[j[0],j[1],2]=image_arr[center[i][0],center[i][1],2]
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
ax.imshow(image_arr)
plt.show()
label={}
distance=init_distance()
pixel=init_pixel()#初始化簇内的像素点 形如:{0: [], 1: [], 2: [], 3: [], 4: [], 5: []}
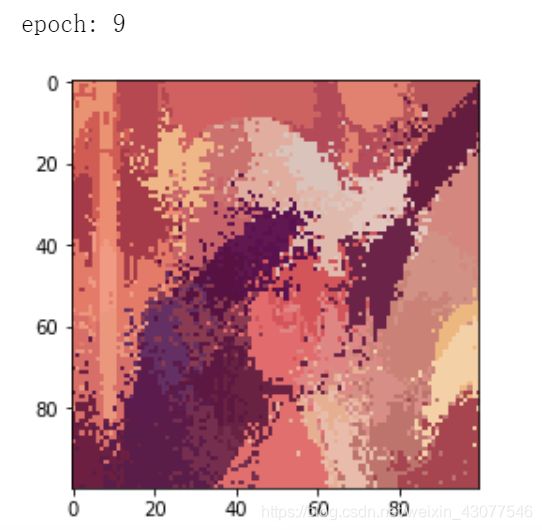
for epoch in range(10):#循环迭代十次
old_label=label
print('epoch:',epoch)
label,distance,pixel=get_cluster(center,distance,old_label,pixel)
center=update_cluster(center,pixel)
save_cluster(center,pixel)
最终可以得到超像素分割的结果为:

调包:
from skimage.segmentation import slic,mark_boundaries
from skimage import img_as_float
pic=cv2.imread('Lenna.png')
segments = slic(img_as_float(pic), n_segments=50,sigma=2)
marked_img=mark_boundaries(img_as_float(cv2.cvtColor(pic, cv2.COLOR_BGR2RGB)), segments)
fig=plt.figure()
# fig.show(marked_img)
ax=fig.add_subplot(1,1,1)
ax.imshow(marked_img)
plt.axis('off')
plt.show()

参考文献
[1] Achanta,Radhakrishna, et al. “SLIC superpixels compared to state-of-the-artsuperpixel methods.” Pattern Analysis and Machine Intelligence, IEEETransactions on 34.11 (2012): 2274-2282.