day38:opencv与传统机器学习
1、K均值
K均值是最简单的聚类方法之一,是一种无监督学习。K均值聚类的原理是通过指定种类数目对数据进行聚类,例如根据颜色将围棋棋盘上的棋子分成两类.
K 均值聚类算法主要分为以下4个步骤。
第一步:指定将数据聚类成看K 类,并随机生成K 个中心点;
第二步: 遍历所有数据,根据数据与中心的位置关系将每个数据归类到不同的中心;
第三步: 计算每个聚类的平均值,并将均值作为新的中心点;
第四步: 重复第二步和第三步,直到每个聚类中心点的坐标收敛 ,输出聚类结果。
void visionagin:: MyKmeanpoints()
{
//颜色表
vectorcolor_lut;
color_lut.push_back(Scalar(0, 0, 255));
color_lut.push_back(Scalar(0, 255,0));
color_lut.push_back(Scalar(255,0,0));
RNG rng(10086);
Mat img(Size(500, 500), CV_8UC3,Scalar::all(255));//500*500白色画布
int k_num = 3;
int pt1_num = rng.uniform(20, 60);
int pt2_num = rng.uniform(20, 60);
int pt3_num = rng.uniform(20, 60);
int pointsnum = pt1_num + pt2_num + pt3_num;
Mat points(pointsnum, 1, CV_32FC2);
//生成pointsnum个随机点
int i = 0;
for (; i < pt1_num; ++i)
{
Point2f p;
p.x = rng.uniform(0, 100);
p.y = rng.uniform(100, 200);
points.at(i, 0) = p;
}
for (; i < pt1_num+pt2_num; ++i)
{
Point2f p;
p.x = rng.uniform(0, 100);
p.y = rng.uniform(400, 500);
points.at(i, 0) = p;
}
for (; i < pt1_num+pt2_num+pt3_num; ++i)
{
Point2f p;
p.x = rng.uniform(300, 400);
p.y = rng.uniform(300, 400);
points.at(i, 0) = p;
}
Mat labels;
TermCriteria T = TermCriteria(TermCriteria::COUNT | TermCriteria::EPS, 10, 0.1);
Mat centers;
//kmean分类
kmeans(points, k_num, labels, T, 3, KMEANS_PP_CENTERS,centers);
//绘制随机点
for (int j = 0; j (j, 0);
Point2f temp = points.at(j, 0);
circle(img, temp, 2, color_lut[index], -1);
}
//以各类中心点为圆心画圆
for (int m = 0; m (m, 0);
ce.y = centers.at(m, 1);
circle(img, ce, 50, Scalar(0,200,0), 1);
}
imshow("result", img);
} 
根据k 均值聚类可以实现基于像素值的 图像分割。 与坐标点聚类 相似, 图像分割时的聚类数 据是每个像素的像素值.
在下列程序中, 首先将每个像素的像素值整理成符合Kmeans() 函数处理的 行数据形式 之后根据需求 选择聚类种类数目.在聚类完成后,将不同类中的像素表示成不同的颜色, 最后在图像窗口中显示.
在该程序中 分别将原图像分割成3 类和5类, 通过结果可以看出, 在利用k 均值进行图像分割时,合适的聚类种类数目是一 项重要的数据参数.
void visionagin:: MyKmeanimg()
{
Mat img = imread("C:\\Users\\86176\\Downloads\\visionimage\\women.jfif");
if (!img.data)
{
cout << "read failed!" << endl;
}
//将图像转化成符合Kmeans输入的数据格式
int pointscount = img.rows * img.cols;
Mat imgchanged=img.reshape(3, pointscount);
Mat data;
imgchanged.convertTo(data, CV_32F);
//进行kmeans分类
Mat labels;
int k_num = 3;
TermCriteria T = TermCriteria(TermCriteria::COUNT | TermCriteria::EPS, 10, 0.1);
kmeans(data, k_num, labels, T, 3, KMEANS_PP_CENTERS);
//着色分类结果
vector color_lut;
color_lut.push_back(Vec3b(0, 0, 255));
color_lut.push_back(Vec3b( 0, 255,0));
color_lut.push_back(Vec3b(255,0,0));
color_lut.push_back(Vec3b(255, 2555, 0));
Mat result = Mat::zeros(img.size(), img.type());
for (int i = 0; i < img.rows; ++i)
{
for (int j = 0; j < img.cols; ++j)
{
int index = labels.at(i * img.cols + j,0);
result.at(i, j) =color_lut[index];
}
}
imshow("result", result);
} 
2.k近邻


数据进行训练并保存:
void visionagin:: Myknearesttrain()
{
Mat img = imread("C:\\Users\\86176\\Downloads\\visionimage\\digits.png");//该图片50行,每5行一个数字
Mat gray;
cvtColor(img, gray, COLOR_BGR2GRAY);
//将图像分割成5000行 20*20
Mat image = Mat::zeros(5000, 400, CV_8UC1);
Mat labels = Mat::zeros(5000, 1, CV_8UC1);
//Rect 为将每个单幅图数据拷贝给image的位置
Rect singleimg;
singleimg.x = 0;
singleimg.height = 1;
singleimg.width = 400;
int index = 0;//第几个单幅图像的数据
for (int i = 0; i < 50; i++)
{
int label = i / 5;
int datay = i * 20;
for (int j = 0; j < 100; j++)
{
int datax = j * 20;
Mat singlenum = Mat::zeros(20, 20, CV_8UC1);
//单个图片20*20 像素
for (int m = 0; m < 20; m++)
{
for (int n = 0; n < 20; n++)
{
singlenum.at(m, n) = gray.at(datay + m, datax + n);
}
}
//将单个图片转化为行数据
Mat rowdata = singlenum.reshape(1, 1);//1*400
singleimg.y = index;
cout << "提取第" << index +1<< "个数据" << endl;
//将每一幅图的数据 放到image
rowdata.copyTo(image(singleimg));
//记录每副图像的label;
labels.at(index,0) = label;
index++;
}
}
imwrite("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字按行排列结果.png", image);
imwrite("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字图像标签.png", labels);
//加载训练模型,转换数据类型
image.convertTo(image, CV_32F);
labels.convertTo(labels, CV_32F);
//构造训练类
Ptr tdata = cv::ml::TrainData::create(image, ml::ROW_SAMPLE, labels);
//进行训练
//
//创建K近邻类
Ptr knn = ml::KNearest::create();
knn->setDefaultK(5);//每个类别拿出5个数据
knn->setIsClassifier(true);//进行分类
//开始训练
knn->train(tdata);
//保存训练结果
knn->save("C:\\Users\\86176\\Downloads\\visionimage\\digits_train_model.yml");
cout << "已完成训练!" << endl;
} 加载数据
void visionagin:: Myknearesttest()
{
Mat data = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字按行排列结果.png",IMREAD_ANYDEPTH);
Mat labels = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字图像标签.png",IMREAD_ANYDEPTH);
data.convertTo(data, CV_32F);
labels.convertTo(labels, CV_32S);
//加载模型
Ptr knn = Algorithm::load("C:\\Users\\86176\\Downloads\\visionimage\\digits_train_model.yml");
//预测
Mat result;
knn->findNearest(data, 5, result);
//统计预测结果与实际情况相同的数目
int count = 0;
for (int i = 0; i < result.rows; ++i)
{
int predict = result.at(i, 0);
if (predict == labels.at(i, 0))
{
count++;
}
}
float d = static_cast(count )/ result.rows;
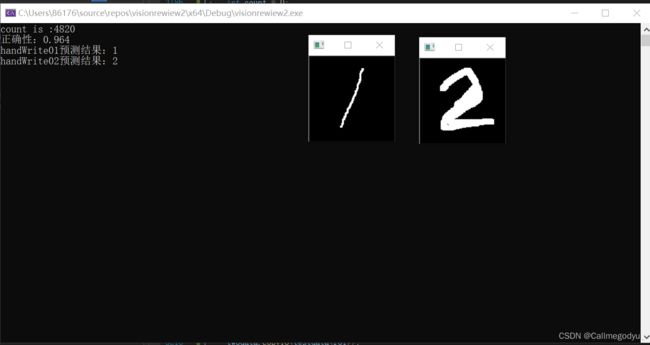
cout << "count is :" << count << endl;
cout << "正确性:" << d << endl;
//实例进行预测
Mat testimg1 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite01.png", IMREAD_ANYDEPTH);
Mat testimg2 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite02.png",IMREAD_ANYDEPTH);
imshow("testimg1", testimg1);
imshow("testimg2", testimg2);
//建立一个存放test数据的矩阵
Mat testdata = Mat::zeros(2, 400, CV_8UC1);
resize(testimg1,testimg1,Size(20,20));
resize(testimg2,testimg2,Size(20, 20));
Rect roi;
roi.x = 0;
roi.height = 1;
roi.width = 400;
roi.y = 0;
Mat onedata=testimg1.reshape(1, 1);
Mat twodata=testimg2.reshape(1, 1);
onedata.copyTo(testdata(roi));
roi.y = 1;
twodata.copyTo(testdata(roi));
testdata.convertTo(testdata, CV_32F);
Mat result2;
knn->findNearest(testdata, 5, result2);
cout << "handWrite01预测结果:" << result2.at(0,0) << endl;
cout << "handWrite02预测结果:" << result2.at(1, 0) << endl;
} 
3.决策树:
void visionagin:: MyDtrees()
{
Mat data = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字按行排列结果.png", IMREAD_ANYDEPTH);
Mat labels = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字图像标签.png", IMREAD_ANYDEPTH);
data.convertTo(data, CV_32F);
labels.convertTo(labels, CV_32S);
//构建决策树
Ptr DTmodel = ml::DTrees::create();
DTmodel->setMaxDepth(8);
DTmodel->setCVFolds(0);
//构建训练数据集
Ptr dtraindata = ml::TrainData::create(data, ml::ROW_SAMPLE, labels);
//开始训练
DTmodel->train(dtraindata);
//保存训练模型
DTmodel->save("C:\\Users\\86176\\Downloads\\visionimage\\决策树训练模型.yml");
//测试模型精度
Mat result;
DTmodel->predict(data, result);//进行预测
int count = 0;
for (int i = 0; i < result.rows; ++i)
{
int predict = result.at(i, 0);
if (predict == labels.at(i, 0))
{
count++;
}
}
float rate = 0;
rate = static_cast(count) / result.rows;
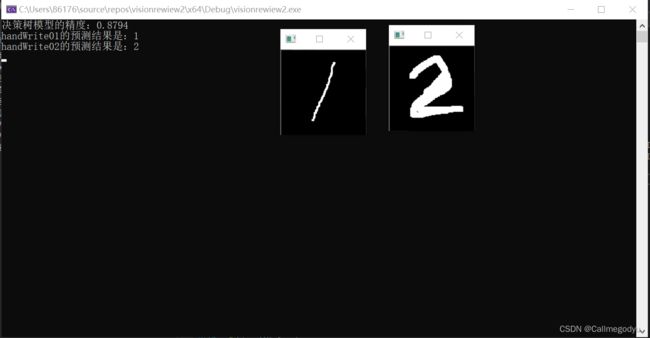
cout << "决策树模型的精度:" << rate << endl;
//实例测试模型
Mat testimg1 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite01.png", IMREAD_ANYDEPTH);
Mat testimg2 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite02.png", IMREAD_ANYDEPTH);
imshow("handWrite01", testimg1);
imshow("handWrite02", testimg2);
//缩小尺寸
resize(testimg1, testimg1, Size(20, 20));
resize(testimg2, testimg2, Size(20, 20));
//构建输入矩阵
Mat testdata = Mat::zeros(2, 400, CV_8UC1);
Rect roi;
roi.x = 0;
roi.y = 0;
roi.height = 1;
roi.width = 400;
Mat onedata = testimg1.reshape(1, 1);
Mat twodata = testimg2.reshape(1, 1);
onedata.copyTo(testdata(roi));
roi.y = 1;
twodata.copyTo(testdata(roi));
testdata.convertTo(testdata,CV_32FC1);
//预测
Mat result2;
DTmodel->predict(testdata, result2);
cout << "handWrite01的预测结果是:" << result2.at(0, 0) << endl;
cout << "handWrite02的预测结果是:" << result2.at(1, 0) << endl;
} 
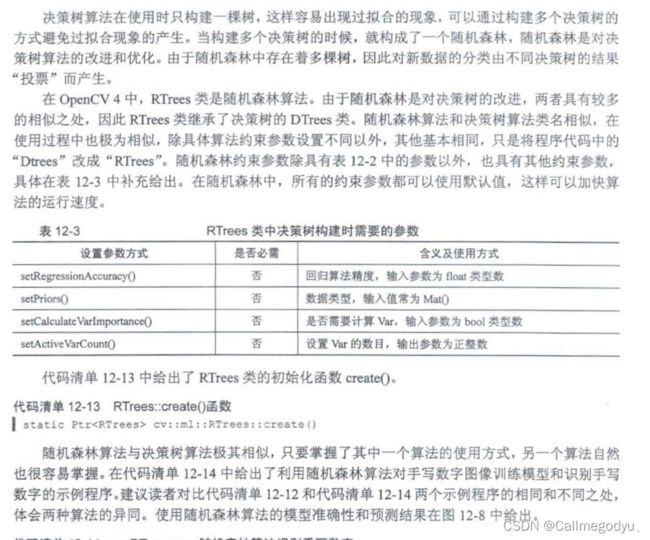
4.随机森林
void visionagin:: MyRtrees()
{
Mat data = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字按行排列结果.png", IMREAD_ANYDEPTH);
Mat labels = imread("C:\\Users\\86176\\Downloads\\visionimage\\5000幅数字图像标签.png", IMREAD_ANYDEPTH);
data.convertTo(data, CV_32FC1);
labels.convertTo(labels, CV_32SC1);
Ptr rtreemodel = ml::RTrees::create();
rtreemodel->setTermCriteria(TermCriteria(TermCriteria::MAX_ITER + TermCriteria::EPS, 100, 0.1));
//构建训练集
Ptr traindata = ml::TrainData::create(data, ml::ROW_SAMPLE, labels);
rtreemodel->train(traindata);
//训练模型保存
rtreemodel->save("C:\\Users\\86176\\Downloads\\visionimage\\随机数树训练模型.yml");
Mat result;
rtreemodel->predict(data, result);
//计算精度
int count=0;
for (int i = 0; i < result.rows; i++)
{
int predict = result.at(i, 0);
if (predict == labels.at(i, 0))
{
count++;
}
}
double rate = 0;
rate = static_cast(count) / result.rows;
cout << "rtrees的精度:" << rate << endl;
//实例测试随机数模型
Mat testimg1 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite01.png", IMREAD_ANYDEPTH);
Mat testimg2 = imread("C:\\Users\\86176\\Downloads\\visionimage\\handWrite02.png", IMREAD_ANYDEPTH);
imshow("handWrite01", testimg1);
imshow("handWrite02", testimg2);
//变换尺寸
resize(testimg1, testimg1, Size(20, 20));
resize(testimg2, testimg2, Size(20, 20));
//建立输入矩阵
Mat testdata = Mat::zeros(2, 400, CV_8UC1);
Mat onedata = testimg1.reshape(1, 1);
Mat twodata = testimg2.reshape(1, 1);
Rect roi;
roi.x = 0;
roi.y = 0;
roi.height = 1;
roi.width = 400;
onedata.copyTo(testdata(roi));
roi.y = 1;
twodata.copyTo(testdata(roi));
testdata.convertTo(testdata, CV_32F);
//预测
Mat result2;
rtreemodel->predict(testdata, result2);
cout << "handWrite01的预测结果:" << result2.at(0, 0) << endl;
cout << "handWrite02的预测结果:" << result2.at(1, 0) << endl;
} 
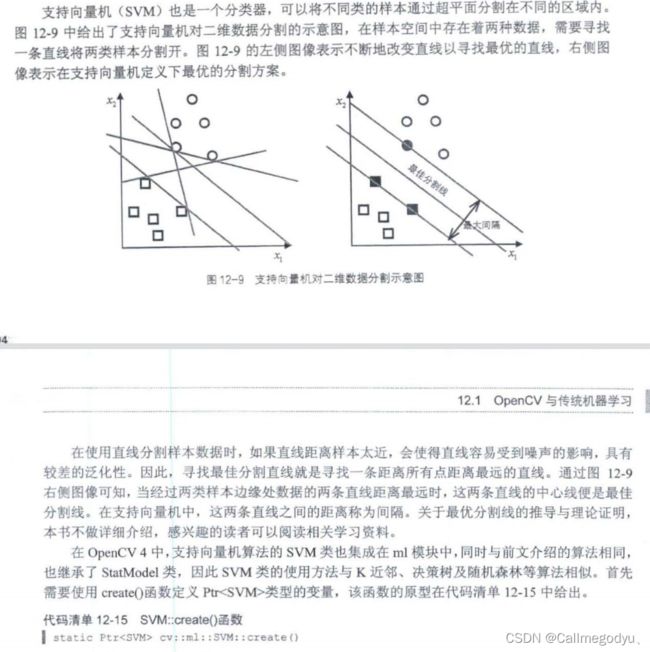
5.支持向量机
void visionagin:: MySVM()
{
FileStorage fread("C:\\Users\\86176\\Downloads\\visionimage\\point.yml", FileStorage::READ);
Mat data,labels;
fread["data"] >> data;
fread["labls"] >> labels;
fread.release();
vectorcolor;
color.push_back(Vec3b(0, 0, 255));
color.push_back(Vec3b(0, 255, 0));
Mat img = Mat(Size(600, 600), CV_8UC3, Scalar::all(255));
Mat img2;
img.copyTo(img2);
for (int i = 0; i < labels.rows; ++i)
{
Point2f p;
p.x = data.at(i, 0);
p.y = data.at(i, 1);
circle(img, p, 3, color[labels.at(i, 0)], -1);
circle(img2, p, 3, color[labels.at(i, 0)], -1);
}
imshow("原数据", img);
//data.convertTo(data, CV_32FC1);
//labels.convertTo(labels, CV_32SC1);
//构建svm模型
Ptr svmmodel = ml::SVM::create();
svmmodel->setKernel(ml::SVM::INTER);
svmmodel->setType(ml::SVM::C_SVC);
svmmodel->setTermCriteria(TermCriteria(TermCriteria::MAX_ITER + TermCriteria::EPS, 100, 0.01));
//构建输入的数据
Ptr traindata = ml::TrainData::create(data, ml::ROW_SAMPLE, labels);
//训练
svmmodel->train(traindata);
//对每个点进行预测
Mat temp = Mat::zeros(1, 2, CV_32FC1);
for (int i = 0; i < img.rows; i+=2)
{
for (int j = 0; j < img.cols; j+=2)
{
temp.at(0) = (float)j;//x
temp.at(1) = (float)i;//y
int result;//单个数据结果
result=svmmodel->predict(temp);
img2.at(i,j) = color[result];
}
}
imshow("result", img2);
}