Faster-RCNN代码解读7:主要文件解读-下
Faster-RCNN代码解读7:主要文件解读-下
前言
因为最近打算尝试一下Faster-RCNN的复现,不要多想,我还没有厉害到可以一个人复现所有代码。所以,是参考别人的代码,进行自己的解读。
代码来自于B站的UP主(大佬666),其把代码都放到了GitHub上了,我把链接都放到下面了(应该不算侵权吧,毕竟代码都开源了_):
b站链接:https://www.bilibili.com/video/BV1of4y1m7nj/?vd_source=afeab8b555e5eb1bfa1e7f267262cbf2
GitHub链接:https://github.com/WZMIAOMIAO/deep-learning-for-image-processing
目的
其实UP主已经做了很好的视频讲解了他的代码,只是有时候我还是喜欢阅读博客来学习,另外视频很长,6个小时,我看的时候容易睡着_,所以才打算写博客记录一下学习笔记。
目前完成的内容
第一篇:VOC数据集详细介绍
第二篇:Faster-RCNN代码解读2:快速上手使用
第三篇:Faster-RCNN代码解读3:制作自己的数据加载器
第四篇:Faster-RCNN代码解读4:辅助文件解读
第五篇: Faster-RCNN代码解读5:主要文件解读-上
第六篇: Faster-RCNN代码解读6:主要文件解读-中
第七篇:Faster-RCNN代码解读7:主要文件解读-下(本文)
目录结构
文章目录
-
- Faster-RCNN代码解读7:主要文件解读-下
-
- 1. 前言:
- 2. det_utils.py文件解读:
-
- 2.1 smooth_l1_loss函数:
- 2.2 Matcher类:
- 2.3 BoxCoder类:
- 2.4 encode_boxes函数:
- 3. rpn_function.py文件解读:
-
- 3.1 RegionProposalNetwork类:
- 3.2 RPNHead类:
- 3.3 AnchorsGenerator类:
- 3.4 concat_box_prediction_layers函数:
- 3.5 permute_and_flatten函数:
- 4. 总结:
1. 前言:
在前面几篇中,我们基本上把该项目大部分文件都进行了解读,目前就剩下RPN部分和一个辅助文件没有解读了。
这里,我们来解读这两个文件:
det_utils.py
rpn_function.py
2. det_utils.py文件解读:
2.1 smooth_l1_loss函数:
首先,看这个最简单的函数,其作用是定义smooth_l1函数,辅助faster-rcnn的损失函数定义。

不过,这里定义的smooth_l1与原版的区别在于引入了一个β参数:
# 定义smooth_l1 损失函数,不过加入了β参数
n = torch.abs(input - target)
# cond = n < beta
cond = torch.lt(n, beta)
loss = torch.where(cond, 0.5 * n ** 2 / beta, n - 0.5 * beta)
if size_average:
return loss.mean()
return loss.sum()
2.2 Matcher类:
该类的主要作用就是划分正负样本。
首先,定义了一些变量:
# 下面两个为:
# 小于阈值的定位负例,即-1
# 处于阈值之间的定义为-2,即忽略不用的类
BELOW_LOW_THRESHOLD = -1
BETWEEN_THRESHOLDS = -2
__annotations__ = {
'BELOW_LOW_THRESHOLD': int,
'BETWEEN_THRESHOLDS': int,
}
__init__方法:
传入的参数:
| 参数 | 意义 |
|---|---|
| high_threshold | 两个阈值中较高的 |
| low_threshold | 两个阈值中较低的,小于它即为负例 |
| allow_low_quality_matches | 默认为False |
我这里解释一下第三个参数的意义,同时也是该类的实现思路。一般情况下,gt_box要与anchors进行匹配,即那些小于0.3(论文原阈值)的为负例,那些处于0.3和0.7之间的忽略不计,而大于0.7的为正例。而,还有一种情况为正例,即那些与gt_box匹配最大的(IOU最大)的anchor为正例,因为有时候gt_box没有匹配的anchor(它匹配的anchor全是忽略不计的,那么它就没有匹配到anchors)。
对于上述的情况,就可以通过参数allow_low_quality_matches控制是否启用匹配最大的anchor也为正例的准则。
初始化方法代码很简单,就是定义一些变量:
self.BELOW_LOW_THRESHOLD = -1
self.BETWEEN_THRESHOLDS = -2
assert low_threshold <= high_threshold
self.high_threshold = high_threshold # 0.7
self.low_threshold = low_threshold # 0.3
self.allow_low_quality_matches = allow_low_quality_matches
__call__方法:
该方法的作用是将gt_box与anchor匹配,并定义正负样本or忽略样本。
代码内容看注释即可,很简单的:
# 判断IOU矩阵个数是否为零,为零,说明有问题
if match_quality_matrix.numel() == 0:
# 为0,报错
if match_quality_matrix.shape[0] == 0:
raise ValueError(
"No ground-truth boxes available for one of the images "
"during training")
else:
raise ValueError(
"No proposal boxes available for one of the images "
"during training")
# M x N 的每一列代表一个anchors与所有gt的匹配iou值
# matched_vals代表每列的最大值,即每个anchors与所有gt匹配的最大iou值
# matches对应最大值所在的索引
matched_vals, matches = match_quality_matrix.max(dim=0) # the dimension to reduce.
# 如果启用了准则
if self.allow_low_quality_matches:
# 克隆一份
all_matches = matches.clone()
else:
all_matches = None
# 计算iou小于low_threshold的索引
below_low_threshold = matched_vals < self.low_threshold
# 计算iou在low_threshold与high_threshold之间的索引值
between_thresholds = (matched_vals >= self.low_threshold) & (
matched_vals < self.high_threshold
)
# iou小于low_threshold的matches索引置为-1
matches[below_low_threshold] = self.BELOW_LOW_THRESHOLD # -1
# iou在[low_threshold, high_threshold]之间的matches索引置为-2
matches[between_thresholds] = self.BETWEEN_THRESHOLDS # -2
# 是否启用与GT_box匹配的最大anchors
if self.allow_low_quality_matches:
assert all_matches is not None
self.set_low_quality_matches_(matches, all_matches, match_quality_matrix)
其中,说明一下传入的参数match_quality_matrix,这个是可以称为IOU矩阵,其形状应该为下图所示:

set_low_quality_matches_方法:
该方法的实现思路:找到与gt_box对应的IOU最大的anchor,即使IOU低于高阈值。
代码简单,看注释:
# 对于每个gt boxes寻找与其iou最大的anchor,
# highest_quality_foreach_gt为匹配到的最大iou值
highest_quality_foreach_gt, _ = match_quality_matrix.max(dim=1) # the dimension to reduce.
# 寻找每个gt boxes与其iou最大的anchor索引,一个gt匹配到的最大iou可能有多个anchor
gt_pred_pairs_of_highest_quality = torch.where(
torch.eq(match_quality_matrix, highest_quality_foreach_gt[:, None])
)
# Example gt_pred_pairs_of_highest_quality:
# tensor([[ 0, 39796],
# [ 1, 32055],
# [ 1, 32070],
# [ 2, 39190],
# [ 2, 40255],
# [ 3, 40390],
# [ 3, 41455],
# [ 4, 45470],
# [ 5, 45325],
# [ 5, 46390]])
# Each row is a (gt index, prediction index)
# Note how gt items 1, 2, 3, and 5 each have two ties
# gt_pred_pairs_of_highest_quality[:, 0]代表是对应的gt index(不需要)
# pre_inds_to_update = gt_pred_pairs_of_highest_quality[:, 1]
pre_inds_to_update = gt_pred_pairs_of_highest_quality[1]
# 保留该anchor匹配gt最大iou的索引,即使iou低于设定的阈值
matches[pre_inds_to_update] = all_matches[pre_inds_to_update]
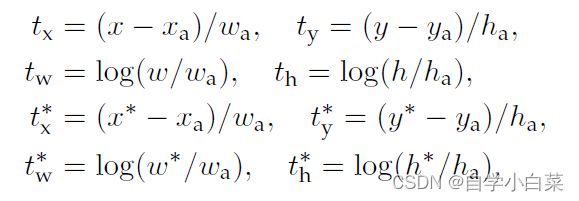
2.3 BoxCoder类:
该类主要实现**回归参数的解码和编码。**即根据回归公式来计算相关参数值。回归公式如下:
__init__方法:
传入参数:
| 参数 | 意义 |
|---|---|
| weights | 超参数,四个值,格式为:Tuple[float, float, float, float] |
| bbox_xform_clip | 用于限制dw、dh的最大值 |
代码内容就是初始化这两个变量:
self.weights = weights
self.bbox_xform_clip = bbox_xform_clip
encode方法:
该方法的作用是:结合anchors和与之对应的gt计算regression参数。
传入参数:
| 参数 | 意义 |
|---|---|
| reference_boxes | 每个proposal/anchor对应的gt_boxes |
| proposals | anchors/proposals |
具体内容看代码注释:
# 统计每张图像的anchors个数,方便后面拼接在一起处理后在分开
boxes_per_image = [len(b) for b in reference_boxes]
# reference_boxes和proposal数据结构相同
reference_boxes = torch.cat(reference_boxes, dim=0)
proposals = torch.cat(proposals, dim=0)
# 将真实值和anchor值传给函数encode_single处理
targets = self.encode_single(reference_boxes, proposals)
# 分开
return targets.split(boxes_per_image, 0)
encode_single方法见下面。
encode_single方法:
传入参数上面说过了。这里直接看代码:
# 获取类别和设备信息
dtype = reference_boxes.dtype
device = reference_boxes.device
# 拷贝一份
weights = torch.as_tensor(self.weights, dtype=dtype, device=device)
# 编码
targets = encode_boxes(reference_boxes, proposals, weights)
可以看出,关键函数是encode_boxes,见后面2.4节。
decode方法:
decode方法与encode恰好相反,encode就是rpn回归操作后输出的参数值,decode就是将这个参数值应用,进行修改anchor坐标,得到更好的anchor。
传入参数:
| 参数 | 意义 |
|---|---|
| rel_codes | bbox的回归参数(就是encode的返回值) |
| boxes | anchor/proposal |
代码内容很简单,和encode类似,需要调用其它的方法:
# 判断类型是否存在问题
assert isinstance(boxes, (list, tuple))
assert isinstance(rel_codes, torch.Tensor)
# 获取每张图片anchor个数,每次运行ahcors个数不定
boxes_per_image = [b.size(0) for b in boxes]
# 将一个batch所有的信息拼接在一起
concat_boxes = torch.cat(boxes, dim=0)
# 获取anchor总数
box_sum = 0
for val in boxes_per_image:
box_sum += val
# 将预测的bbox回归参数应用到对应anchors上得到预测bbox的坐标
pred_boxes = self.decode_single(
rel_codes, concat_boxes
)
# 防止pred_boxes为空时导致reshape报错
if box_sum > 0:
pred_boxes = pred_boxes.reshape(box_sum, -1, 4)
decode_single方法:
这个方法就是实现修正坐标的功能。是按照下面公式进行修正的:

传入的参数上面已经说过了,这里直接看代码:
首先,获取设备,并获取将anchor的四个坐标形式转为中心坐标+高宽形式(对应上面公式的xa、ya、wa、ha):
# 放入设备中
boxes = boxes.to(rel_codes.dtype)
# xmin, ymin, xmax, ymax
widths = boxes[:, 2] - boxes[:, 0] # anchor/proposal宽度
heights = boxes[:, 3] - boxes[:, 1] # anchor/proposal高度
ctr_x = boxes[:, 0] + 0.5 * widths # anchor/proposal中心x坐标
ctr_y = boxes[:, 1] + 0.5 * heights # anchor/proposal中心y坐标
用回归参数获取值并设定其阈值(对应上面公式的tx、ty、th、tw):
# 超参数wx, wy, ww, wh
wx, wy, ww, wh = self.weights # RPN中为[1,1,1,1], fastrcnn中为[10,10,5,5]
# 0::4采样方式,得到的维度为2
dx = rel_codes[:, 0::4] / wx # 预测anchors/proposals的中心坐标x回归参数
dy = rel_codes[:, 1::4] / wy # 预测anchors/proposals的中心坐标y回归参数
dw = rel_codes[:, 2::4] / ww # 预测anchors/proposals的宽度回归参数
dh = rel_codes[:, 3::4] / wh # 预测anchors/proposals的高度回归参数
# 对dw、dh限制数值上下限
dw = torch.clamp(dw, max=self.bbox_xform_clip)
dh = torch.clamp(dh, max=self.bbox_xform_clip)
接着,用上面的公式,求出x、y、w、h值,即修正后的anchor坐标和宽高值:
# 将预测值应用到anchor中
# [:, None] 是为了维度相同
pred_ctr_x = dx * widths[:, None] + ctr_x[:, None]
pred_ctr_y = dy * heights[:, None] + ctr_y[:, None]
pred_w = torch.exp(dw) * widths[:, None]
pred_h = torch.exp(dh) * heights[:, None]
最后,将中心坐标+宽高的形式转为四个坐标值形式,并拼接在一起返回即可:
# 将中心坐标形式转为左上角+右下角坐标形式
# xmin
pred_boxes1 = pred_ctr_x - torch.tensor(0.5, dtype=pred_ctr_x.dtype, device=pred_w.device) * pred_w
# ymin
pred_boxes2 = pred_ctr_y - torch.tensor(0.5, dtype=pred_ctr_y.dtype, device=pred_h.device) * pred_h
# xmax
pred_boxes3 = pred_ctr_x + torch.tensor(0.5, dtype=pred_ctr_x.dtype, device=pred_w.device) * pred_w
# ymax
pred_boxes4 = pred_ctr_y + torch.tensor(0.5, dtype=pred_ctr_y.dtype, device=pred_h.device) * pred_h
# 拼接在一起
pred_boxes = torch.stack((pred_boxes1, pred_boxes2, pred_boxes3, pred_boxes4), dim=2).flatten(1)
2.4 encode_boxes函数:
首先,把公式放在这里:

这个函数的作用就是实现上面公式的计算,并按照指定格式进行存储。
首先,获取权重参数,这个是人为设定的:
# 获取超参数值,是权重参数
wx = weights[0]
wy = weights[1]
ww = weights[2]
wh = weights[3]
接着,获取anchor/proposal和真实框的坐标值,并增加一个维度(增加维度是为了统一计算格式):
# 增加一个维度
# 并获取单独值
proposals_x1 = proposals[:, 0].unsqueeze(1)
proposals_y1 = proposals[:, 1].unsqueeze(1)
proposals_x2 = proposals[:, 2].unsqueeze(1)
proposals_y2 = proposals[:, 3].unsqueeze(1)
reference_boxes_x1 = reference_boxes[:, 0].unsqueeze(1)
reference_boxes_y1 = reference_boxes[:, 1].unsqueeze(1)
reference_boxes_x2 = reference_boxes[:, 2].unsqueeze(1)
reference_boxes_y2 = reference_boxes[:, 3].unsqueeze(1)
然后,将四个坐标值(左上+右下)转为中心坐标+宽高的形式:
# 计算建议框的中心坐标和高、宽
ex_widths = proposals_x2 - proposals_x1
ex_heights = proposals_y2 - proposals_y1
# parse coordinate of center point
ex_ctr_x = proposals_x1 + 0.5 * ex_widths
ex_ctr_y = proposals_y1 + 0.5 * ex_heights
# 真实中心坐标和高宽值
gt_widths = reference_boxes_x2 - reference_boxes_x1
gt_heights = reference_boxes_y2 - reference_boxes_y1
gt_ctr_x = reference_boxes_x1 + 0.5 * gt_widths
gt_ctr_y = reference_boxes_y1 + 0.5 * gt_heights
最后,就是按照上述公式进行计算,并将最后的值拼接在一起返回即可:
# 按照公式计算
targets_dx = wx * (gt_ctr_x - ex_ctr_x) / ex_widths
targets_dy = wy * (gt_ctr_y - ex_ctr_y) / ex_heights
targets_dw = ww * torch.log(gt_widths / ex_widths)
targets_dh = wh * torch.log(gt_heights / ex_heights)
# 将值拼接在一起
targets = torch.cat((targets_dx, targets_dy, targets_dw, targets_dh), dim=1)
3. rpn_function.py文件解读:
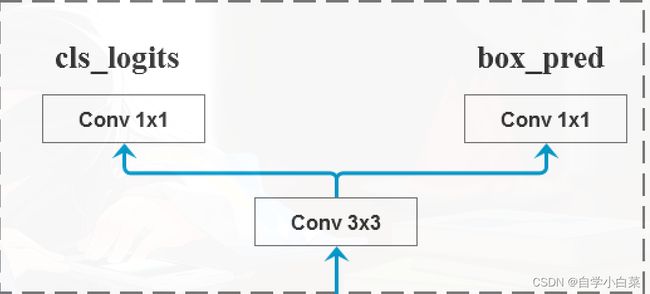
为了方便大家理解,把RPN框架截取了出来:

3.1 RegionProposalNetwork类:
这个类是这个文件主要的类,串联了其它方法。其主要定义了RPN网络。
__init__方法:
输入的参数:
| 参数 | 意义 |
|---|---|
| anchor_generator | 生成的anchors |
| head | RPN Head架构 |
| fg_iou_thresh | 前景阈值 0.7,其实就是正例阈值 |
| bg_iou_thresh | 背景阈值 0.3,其实就是负例阈值 |
| batch_size_per_image | 正负样本个数 |
| positive_fraction | 正样本占总样本比例 |
| pre_nms_top_n | NMS处理之前保留的个数 |
| post_nms_top_n | NMS处理后剩余的个数,即RPN输出的建议框个数 |
| nms_thresh | NMS处理时的阈值 |
| score_thresh | 获取建议框时筛选的阈值 |
该方法的内容就是初始化变量:
# 初始化类变量
self.anchor_generator = anchor_generator # anchor生成器
self.head = head # rpn head部分
# 将BoxCoder类赋给box_coder变量,并初始化权重参数
self.box_coder = det_utils.BoxCoder(weights=(1.0, 1.0, 1.0, 1.0))
# 将计算IOU的方法赋值为box_similarity变量
self.box_similarity = box_ops.box_iou
# 实例化类:这个类是用来筛选正负样本的
self.proposal_matcher = det_utils.Matcher(
fg_iou_thresh, # 当iou大于fg_iou_thresh(0.7)时视为正样本
bg_iou_thresh, # 当iou小于bg_iou_thresh(0.3)时视为负样本
allow_low_quality_matches=True
)
# 实例化类:这个类是用来抽取比例的正负样本
self.fg_bg_sampler = det_utils.BalancedPositiveNegativeSampler(
batch_size_per_image, positive_fraction # 256, 0.5
)
# 初始化参数
self._pre_nms_top_n = pre_nms_top_n
self._post_nms_top_n = post_nms_top_n
self.nms_thresh = nms_thresh
self.score_thresh = score_thresh
self.min_size = 1.
forward方法:
下面,来看前向传播算法,并以该方法为路径取解读该文件的各个方法。
首先,传入的参数:
| 参数 | 意义 |
|---|---|
| images | 输入图像 |
| features | CNN架构输出的特征层,为字典 |
| targets | 真实框的各种信息 |
代码首先,将features参数的值提取出来:
# features是所有预测特征层组成的OrderedDict,将value提取出来
# 如果没有用FPN,字典就是一个值,value = 【batch,channel,w,h】,特征图尺寸
features = list(features.values())
然后,将特征层传给RPN Head部分进行分类和回归(此时可以跳到3.2节看RPN Head介绍),其返回了分类的概率值和回归的参数值:
# 输入head架构中,计算每个预测特征层上的预测目标概率和bboxes regression参数
# objectness和pred_bbox_deltas都是list
# 同样,如果没有用FPN,列表都只有一个值
objectness, pred_bbox_deltas = self.head(features)
接着,需要进行anchor的生成(此时可以跳到3.3节看细节):
# 生成一个batch图像的所有anchors信息
anchors = self.anchor_generator(images, features)
然后,获取一些变量的值,比如anchor个数等:
# list(anchors)元素个数等于batch_size
num_images = len(anchors)
# 计算每个预测特征层上的对应的anchors数量
# 如果不用FPN就一层
# o.shape =【batch,c,w,h】 ; o[0].shape = 【c,w,h】
num_anchors_per_level_shape_tensors = [o[0].shape for o in objectness]
# 三个值相乘就是anchor的个数
num_anchors_per_level = [s[0] * s[1] * s[2] for s in num_anchors_per_level_shape_tensors]
接着,需要对RPN Head输出的值内部进行一定的调整(concat_box_prediction_layers方法见3.4节):
# 调整内部tensor格式以及shape
objectness, pred_bbox_deltas = concat_box_prediction_layers(objectness,
pred_bbox_deltas)
通过上一篇的decode方法,得到RPN最终输出的anchors,并按照指定格式reshape:
# 将预测的bbox regression参数应用到anchors上得到最终预测bbox坐标
proposals = self.box_coder.decode(pred_bbox_deltas.detach(), anchors)
# rehshape,格式为上面调整后的格式[N,-1,C]
proposals = proposals.view(num_images, -1, 4)
接着,便是对提取出来的anchors框进行筛选,比如删除小box框、nms处理等(filter_proposals方法见后面):
# 筛除小boxes框,nms处理,根据预测概率获取前post_nms_top_n个目标
boxes, scores = self.filter_proposals(proposals, objectness, images.image_sizes, num_anchors_per_level)
最后,就是计算损失即可:
# 计算损失
losses = {}
if self.training:
assert targets is not None
# 计算每个anchors最匹配的gt,并将anchors进行分类,前景,背景以及废弃的anchors
labels, matched_gt_boxes = self.assign_targets_to_anchors(anchors, targets)
# 结合anchors以及对应的gt,计算regression参数
regression_targets = self.box_coder.encode(matched_gt_boxes, anchors)
# 计算损失
loss_objectness, loss_rpn_box_reg = self.compute_loss(
objectness, pred_bbox_deltas, labels, regression_targets
)
losses = {
"loss_objectness": loss_objectness,
"loss_rpn_box_reg": loss_rpn_box_reg
}
filter_proposals方法:
该方法筛除小boxes框,nms处理,根据预测概率获取前post_nms_top_n个目标。
传入的参数:
| 参数 | 意义 |
|---|---|
| proposals | 预测的bbox坐标 |
| objectness | 预测的目标概率 |
| image_shapes | batch中每张图片的size信息 |
| num_anchors_per_level | 每个预测特征层上预测anchors的数目 |
首先,获取batch值和设备信息:
# 获取个数和设备信息
num_images = proposals.shape[0]
device = proposals.device
由于RPN对于整个Faster-RCNN来说,只是一个叶结点,因此不需要它的梯度信息:
# 丢弃梯度信息,只要数值信息
objectness = objectness.detach()
objectness = objectness.reshape(num_images, -1)
接着,定义一个level变量,用于区分不同特征层上的anchor索引信息:
# levels负责记录分隔不同预测特征层上的anchors索引信息
# # 作用: 区分不同特征层
# torch.full即生成长度为n,值由idx填充的tensor
# 如果不用FPN,tensor值全为0
levels = [torch.full((n, ), idx, dtype=torch.int64, device=device)
for idx, n in enumerate(num_anchors_per_level)]
# 拼接在一起,如果不用FPN,没什么特殊的意义,只是变为了1维tensor
levels = torch.cat(levels, 0)
# reshape处理,变为2维,方便计算
levels = levels.reshape(1, -1).expand_as(objectness)
然后,获取每张预测特征图上预测概率排前pre_nms_top_n的anchors索引值(_get_top_n_idx方法见后面):
# 获取每张预测特征图上预测概率排前pre_nms_top_n的anchors索引值
top_n_idx = self._get_top_n_idx(objectness, num_anchors_per_level)
接着,根据获取的索引值,取获取对应的概率值、回归参数等值:
# 根据每个预测特征层预测概率排前pre_nms_top_n的anchors索引值获取相应概率信息
objectness = objectness[batch_idx, top_n_idx]
levels = levels[batch_idx, top_n_idx]
# 预测概率排前pre_nms_top_n的anchors索引值获取相应bbox坐标信息
proposals = proposals[batch_idx, top_n_idx]
然后,定义一些变量:
image_range = torch.arange(num_images, device=device)
batch_idx = image_range[:, None] # [batch_size, 1]
objectness_prob = torch.sigmoid(objectness)
final_boxes = []
final_scores = []
最后,开始遍历处理:
# 遍历每张图像的相关预测信息
for boxes, scores, lvl, img_shape in zip(proposals, objectness_prob, levels, image_shapes):
# 调整预测的boxes信息,将越界的坐标调整到图片边界上
boxes = box_ops.clip_boxes_to_image(boxes, img_shape)
# 返回boxes满足宽,高都大于min_size的索引
keep = box_ops.remove_small_boxes(boxes, self.min_size)
boxes, scores, lvl = boxes[keep], scores[keep], lvl[keep]
# 移除小概率boxes,参考下面这个链接
# https://github.com/pytorch/vision/pull/3205
keep = torch.where(torch.ge(scores, self.score_thresh))[0] # ge: >=
boxes, scores, lvl = boxes[keep], scores[keep], lvl[keep]
# nms处理
keep = box_ops.batched_nms(boxes, scores, lvl, self.nms_thresh)
# 只保留最高得分预测
keep = keep[: self.post_nms_top_n()]
boxes, scores = boxes[keep], scores[keep]
# 添加值
final_boxes.append(boxes)
final_scores.append(scores)
_get_top_n_idx方法:
该方法的作用是:获取每张预测特征图上预测概率排前pre_nms_top_n的anchors索引值。
传入参数:
| 参数 | 意义 |
|---|---|
| objectness | Tensor(每张图像的预测目标概率信息 ) |
| num_anchors_per_level | List(每个预测特征层上的预测的anchors个数) |
该方法的代码内容还是很简单的:
r = [] # 记录每个预测特征层上预测目标概率前pre_nms_top_n的索引信息
offset = 0
# 遍历每个预测特征层上的预测目标概率信息
# objectness.split(num_anchors_per_level, 1) 得到不同特征层不同anchor个数
for ob in objectness.split(num_anchors_per_level, 1):
# torchvision._is_tracing()一般不满足,直接跳过
if torchvision._is_tracing():
num_anchors, pre_nms_top_n = _onnx_get_num_anchors_and_pre_nms_top_n(ob, self.pre_nms_top_n())
else:
num_anchors = ob.shape[1] # 预测特征层上的预测的anchors个数
# 比如取前100个值的anchors,但是有时候特征层anchors个数可能比100个少,那么就取此时的anchors个数即可
pre_nms_top_n = min(self.pre_nms_top_n(), num_anchors)
# top_n_idx:返回给定输入沿给定维度的k个最大元素索引值
# 官方自己定义的排序方法
_, top_n_idx = ob.topk(pre_nms_top_n, dim=1)
# 之前把所有的anchor合并在一起了,索引就变了
# 由于不同层的anchor个数不同,因此需要添加偏移量
r.append(top_n_idx + offset)
offset += num_anchors
pre_nms_top_n方法:
返回NMS处理之前保留的个数。
这个代码的内容非常简单,就是看是训练还是测试模式,然后返回NMS处理之前保留的个数:
if self.training:
return self._pre_nms_top_n['training']
return self._pre_nms_top_n['testing']
compute_loss方法:
该方法就是计算RPN的损失,包括类别损失(前景与背景),bbox regression损失。
传入的参数:
| 参数 | 意义 |
|---|---|
| objectness | 预测的前景概率 |
| pred_bbox_deltas | 预测的bbox regression |
| labels | 真实的标签 1, 0, -1(batch中每一张图片的labels对应List的一个元素中) |
| regression_targets | 真实的bbox regression |
该方法实现很简单,看注释:
# 按照给定的batch_size_per_image, positive_fraction选择正负样本
sampled_pos_inds, sampled_neg_inds = self.fg_bg_sampler(labels)
# 将一个batch中的所有正负样本List(Tensor)分别拼接在一起,并获取非零位置的索引
# sampled_pos_inds = torch.nonzero(torch.cat(sampled_pos_inds, dim=0)).squeeze(1)
sampled_pos_inds = torch.where(torch.cat(sampled_pos_inds, dim=0))[0]
# sampled_neg_inds = torch.nonzero(torch.cat(sampled_neg_inds, dim=0)).squeeze(1)
sampled_neg_inds = torch.where(torch.cat(sampled_neg_inds, dim=0))[0]
# 将所有正负样本索引拼接在一起
sampled_inds = torch.cat([sampled_pos_inds, sampled_neg_inds], dim=0)
objectness = objectness.flatten()
labels = torch.cat(labels, dim=0)
regression_targets = torch.cat(regression_targets, dim=0)
# 计算边界框回归损失,smooth_l1损失
box_loss = det_utils.smooth_l1_loss(
pred_bbox_deltas[sampled_pos_inds],
regression_targets[sampled_pos_inds],
beta=1 / 9,
size_average=False,
) / (sampled_inds.numel())
# 计算目标预测概率损失,交叉熵损失
objectness_loss = F.binary_cross_entropy_with_logits(
objectness[sampled_inds], labels[sampled_inds]
)
3.2 RPNHead类:
该类主要定义的结构为:
__init__方法:
传入的参数:
| 参数 | 意义 |
|---|---|
| in_channels | 输入特征矩阵的通道数,VGG16-512,ZF-256, |
| num_anchors | 每个网格对应的anchor个数 |
初始化方法需要定义RPN Head网络结构,即一个3*3卷积层,和两个1*1卷积层,并对其进行参数初始化:
# 3x3 滑动窗口
self.conv = nn.Conv2d(in_channels, in_channels, kernel_size=3, stride=1, padding=1)
# 两个预测器
# 计算预测的目标分数(这里的目标只是指前景或者背景)
self.cls_logits = nn.Conv2d(in_channels, num_anchors, kernel_size=1, stride=1)
# 计算预测的目标bbox regression参数,4k个数
self.bbox_pred = nn.Conv2d(in_channels, num_anchors * 4, kernel_size=1, stride=1)
# 对上面的三个层进行参数初始化
for layer in self.children():
if isinstance(layer, nn.Conv2d):
torch.nn.init.normal_(layer.weight, std=0.01)
torch.nn.init.constant_(layer.bias, 0)
forward方法:
就是根据网络结构,定义正常的前向传播顺序即可,不过由于有的网络采用FPN结构,所以需要迭代:
logits = []
bbox_reg = []
# 遍历预测特征层,此处为1层
# 采用FPN时,就不只1层了
for i, feature in enumerate(x):
# 滑动窗口计算
t = F.relu(self.conv(feature))
# 预测目标分数和回归,并添加到结果中
logits.append(self.cls_logits(t))
bbox_reg.append(self.bbox_pred(t))
return logits, bbox_reg
3.3 AnchorsGenerator类:
该类的作用是生成anchor。
__init__方法:
传入的参数:(基本尺寸个数3*缩放因子个数3=anchor个数9)
| 参数 | 意义 |
|---|---|
| sizes | anchor对应的基本尺寸,默认为:(128, 256, 512) |
| aspect_ratios | anchor对应的缩放因子,默认为:(0.5, 1.0, 2.0) |
本来只需要将变量初始化即可。但是,由于训练的时候可能采取FPN结构,所以该方法传入的参数值可能是不同的,需要特别处理:
# 判断传入的size是否为list or tuple类型
# FPN传入: sizes=((32, 64, 128, 256, 512),) ; aspect_ratios=((0.5, 1.0, 2.0),)
# 正常传入: sizes=((32, 64, 128, 256, 512);aspect_ratios=((0.5, 1.0, 2.0)
# 可见,此时不满足条件,默认参数暂时不用
if not isinstance(sizes[0], (list, tuple)):
# TODO change this
sizes = tuple((s,) for s in sizes)
# 同样判断aspect_ratios
if not isinstance(aspect_ratios[0], (list, tuple)):
aspect_ratios = (aspect_ratios,) * len(sizes)
接着,就是参数初始化:
# 初始化
self.sizes = sizes
self.aspect_ratios = aspect_ratios
self.cell_anchors = None
self._cache = {} # 存储待会的信息
forward方法:
同样以forward方法来解读这个类的其它方法。
首先,传入的参数:
| 参数 | 意义 |
|---|---|
| image_list | 里面两个值:一个打包后的数据,为一个tensor;一个resize后的大小(忘记了看看前面介绍的ImageList内容) |
| feature_maps | 预测特征层的信息,如果不用FPN,list元素个数就1个 |
代码内容:
首先,获取特征的尺寸值和输入图像的尺寸值,并获取变量类型和设备信息:
# 获取每个预测特征层的尺寸(height, width)
grid_sizes = list([feature_map.shape[-2:] for feature_map in feature_maps])
# 获取输入图像(打包后的)的height和width
image_size = image_list.tensors.shape[-2:]
# 获取变量类型和设备类型
dtype, device = feature_maps[0].dtype, feature_maps[0].device
接着,计算特征层上的一步等于原始图像上的步长,比如VGG16,下采样16倍,特征图上走一步,原图上走16步:
# 计算特征层上的一步等于原始图像上的步长,比如VGG16,下采样16倍,特征图上走一步,原图上走16步
# 图像大小 / 特征图大小 = 缩放因子 ----- 宽 + 高 都要除
strides = [[torch.tensor(image_size[0] // g[0], dtype=torch.int64, device=device),
torch.tensor(image_size[1] // g[1], dtype=torch.int64, device=device)] for g in grid_sizes]
然后,根据提供的sizes和aspect_ratios生成anchors模板(set_cell_anchors方法见后面):
# 根据提供的sizes和aspect_ratios生成anchors模板
# 从传入的size数据,可以看出anchor生成的都是原图中的尺度
self.set_cell_anchors(dtype, device)
接着,将模板anchor进行偏移(原来是以(0,0)为中心,偏移后,就是特征图每个单元格对应的原图的anchors),得到真正的anchor:
# 计算/读取所有anchors的坐标信息(这里的anchors信息是映射到原图上的所有anchors信息,不是anchors模板)
# 得到的是一个list列表,对应每张预测特征图映射回原图的anchors坐标信息
anchors_over_all_feature_maps = self.cached_grid_anchors(grid_sizes, strides)
最后,就是针对每一张图片存储其anchor信息,并将anchor进行拼接存储:
# 定义anchors格式
anchors = torch.jit.annotate(List[List[torch.Tensor]], [])
# 遍历一个batch中的每张图像
for i, (image_height, image_width) in enumerate(image_list.image_sizes):
anchors_in_image = []
# 遍历每张预测特征图映射回原图的anchors坐标信息
# anchors_over_all_feature_maps如果不用FPN,只有一个值
for anchors_per_feature_map in anchors_over_all_feature_maps:
anchors_in_image.append(anchors_per_feature_map)
# 添加到anchors中
anchors.append(anchors_in_image)
# 将每一张图像的所有预测特征层的anchors坐标信息拼接在一起
# anchors是个list,每个元素为一张图像的所有anchors信息
anchors = [torch.cat(anchors_per_image) for anchors_per_image in anchors]
# Clear the cache in case that memory leaks.
# 清空字典,防止内存泄露
self._cache.clear()
set_cell_anchors方法:
该类的作用就是生成anchor模板。
代码内容很简单,看注释:
# 检测self.cell_anchors是否为空,因为默认就是为空
if self.cell_anchors is not None:
cell_anchors = self.cell_anchors
assert cell_anchors is not None
# suppose that all anchors have the same device
# which is a valid assumption in the current state of the codebase
if cell_anchors[0].device == device:
return
# 第一次,直接跳过上面的if,进入循环
# 根据提供的sizes和aspect_ratios生成anchors模板 ,anchors模板都是以(0, 0)为中心的anchor
# 如果有多层,那么就需要列表存储;但不用FPN就为1层,cell_anchors列表只有1一个值,这个值有15个元素,每个元素就是一个anchor
cell_anchors = [
# 传入size和aspect_ratios,用generate_anchors方法生成模板
self.generate_anchors(sizes, aspect_ratios, dtype, device)
for sizes, aspect_ratios in zip(self.sizes, self.aspect_ratios)
]
# 变为类变量
self.cell_anchors = cell_anchors
generate_anchors方法见后面。
generate_anchors方法:
该方法就是生成anchor的真正实现方法。
传入参数上面就说了,即基本尺寸和缩放因子等。
首先,将变量转为tensor格式:
# 转为tensor格式
scales = torch.as_tensor(scales, dtype=dtype, device=device)
aspect_ratios = torch.as_tensor(aspect_ratios, dtype=dtype, device=device)
然后,获取宽、高的缩放因子:
# 取缩放因子的根号,即为高度的乘法因子;;; 这里的缩放因子应该指的是面积的缩放
# 不确定,还没有仔细验证,有知道的朋友可以告知一声
h_ratios = torch.sqrt(aspect_ratios)
w_ratios = 1.0 / h_ratios
接着,就是对长、宽进行缩放:
# [r1, r2, r3]' * [s1, s2, s3]
# w_ratios、scales原来都为向量,这里添加一个维度,就变为矩阵相乘,相当于得到了每一个anchor的宽度值
# 然后再使用vier展平为1维向量
# 个数 = scales * ratios,比如5*3=15
ws = (w_ratios[:, None] * scales[None, :]).view(-1)
hs = (h_ratios[:, None] * scales[None, :]).view(-1)
最后,将长、宽转为坐标,此时生成的anchor模板,都是以(0,0)为中心的anchor框:
# 生成的anchors模板都是以(0, 0)为中心的, shape [len(ratios)*len(scales), 4]
# 以(0,0)为中心,左上角坐标为(-ws/2, -hs/2)
# torch.stack,在指定维度上拼接
base_anchors = torch.stack([-ws, -hs, ws, hs], dim=1) / 2
cached_grid_anchors方法:
该方法的作用是将计算得到的所有anchors信息进行缓存。
输入参数:
| 参数 | 意义 |
|---|---|
| grid_sizes | 特征图的尺寸信息 |
| strides | 原图相对于特征图的缩放因子 |
代码内容很简单,看注释即可:
# 将数值转为字符串并拼接在一起
key = str(grid_sizes) + str(strides)
# self._cache是字典类型
# 如果key在字典中,说明之前已经存储过了,就跳过
if key in self._cache:
return self._cache[key]
# 否则,则进入另外一个方法中处理
anchors = self.grid_anchors(grid_sizes, strides)
# 送入字典中
self._cache[key] = anchors
grid_anchors方法见后面。
grid_anchors方法:
该类的作用是计算预测特征图对应原始图像上的所有anchors的坐标。
输入参数:
| 参数 | 意义 |
|---|---|
| grid_sizes | 预测特征矩阵的height和width |
| strides | 预测特征矩阵上一步对应原始图像上的步距 |
将之前生成的anchor模板赋值一个变量,并判断其是否为空:
# 定义一个列表
anchors = []
# 将anchor模板复制给变量cell_anchors
cell_anchors = self.cell_anchors
# 判断cell_anchors是否为空
assert cell_anchors is not None
接着,遍历每个预测特征层的grid_size,strides和cell_anchors,不用FPN只有一层:
# 遍历每个预测特征层的grid_size,strides和cell_anchors,不用FPN只有一层
for size, stride, base_anchors in zip(grid_sizes, strides, cell_anchors):
.......
然后,计算特征层相对于原图的偏移量,并将这个偏移量用于模板anchor中,即可生成真正的anchor:
# 遍历每个预测特征层的grid_size,strides和cell_anchors,不用FPN只有一层
for size, stride, base_anchors in zip(grid_sizes, strides, cell_anchors):
# 获取特征层的尺寸信息
grid_height, grid_width = size
# 获取原图对于特征层的缩放因子
stride_height, stride_width = stride
# 获取设备信息
device = base_anchors.device
# 参考图片
# shape: [grid_width] 对应原图上的x坐标(列)
shifts_x = torch.arange(0, grid_width, dtype=torch.float32, device=device) * stride_width
# shape: [grid_height] 对应原图上的y坐标(行)
shifts_y = torch.arange(0, grid_height, dtype=torch.float32, device=device) * stride_height
# 计算预测特征矩阵上每个点对应原图上的坐标(anchors模板的坐标偏移量)
# torch.meshgrid函数分别传入行坐标和列坐标,生成网格行坐标矩阵和网格列坐标矩阵,shape: [grid_height, grid_width]
shift_y, shift_x = torch.meshgrid(shifts_y, shifts_x)
# 展平处理
shift_x = shift_x.reshape(-1)
shift_y = shift_y.reshape(-1)
# 计算anchors坐标(xmin, ymin, xmax, ymax)在原图上的坐标偏移量,左上角和右下角偏移量相同
# 所谓的偏移量,即特征图的位置转到原图后的偏移量
# shape: [grid_width*grid_height, 4]
shifts = torch.stack([shift_x, shift_y, shift_x, shift_y], dim=1)
# 将anchors模板与原图上的坐标偏移量相加得到原图上所有anchors的坐标信息(shape不同时会使用广播机制)
# shifts.view(-1, 1, 4) : 第一个维度自己推导,第二个维度为1,第三个维度为4
# base_anchors.view(1, -1, 4) : 第一个维度为1,第二个维度自己推导,第三个维度为4
shifts_anchor = shifts.view(-1, 1, 4) + base_anchors.view(1, -1, 4)
# shifts_anchor = 【850,15,4】,15个anchor、4个坐标、850个网格
# 最后,reshap一下,第一维度为总共的anchor个数
anchors.append(shifts_anchor.reshape(-1, 4))
上面的代码不好理解,可以看下面的图片(来自大佬的视频截图):

上面的代码意思是,之前我们只生成了模板anchor,即这些anchor虽然大小不同,但是都是以(0,0)为中心点坐标。而真正的anchor是每个单元格都有的值,因此需要根据特征图尺寸,将这些anchor进行偏移(如上图)。
3.4 concat_box_prediction_layers函数:
该函数的作用是:对box_cla和box_regression两个list中的每个预测特征层的预测信息的tensor排列顺序以及shape进行调整。
输入参数:
| 参数 | 意义 |
|---|---|
| box_cls | 每个预测特征层上的预测目标概率 |
| box_regression | 每个预测特征层上的预测目标bboxes regression参数 |
首先,定义两个空列表,一会用于存储值:
# 定义两个空列表
box_cls_flattened = [] # 目标分数参数
box_regression_flattened = [] # 回归参数
接着,遍历每个特征层:
# 遍历每个预测特征层
for box_cls_per_level, box_regression_per_level in zip(box_cls, box_regression):
....
该遍历的内部内容为:首先,获取回归参数和分类参数的shape值;接着,计算anchor个数和classes个数;然后,调整shape并展平:(permute_and_flatten方法见3.5节)
# 注意,当计算RPN中的proposal时,classes_num=1,只区分目标和背景
# 因此,不像论文中所说的2(前景or背景)*k,而是1(是不是背景)*k
N, AxC, H, W = box_cls_per_level.shape
# # [batch_size, anchors_num_per_position * 4, height, width]
Ax4 = box_regression_per_level.shape[1]
# anchor个数
A = Ax4 // 4
# 类别个数
C = AxC // A
# 进行展平处理,[N, -1, C],-1就是所有anchor个数,C表示类别个数,即1
box_cls_per_level = permute_and_flatten(box_cls_per_level, N, A, C, H, W)
box_cls_flattened.append(box_cls_per_level)
# [N, -1, C],这里的C是每个anchor有4个参数
box_regression_per_level = permute_and_flatten(box_regression_per_level, N, A, 4, H, W)
box_regression_flattened.append(box_regression_per_level)
最后,将值进行拼接再展品返回即可:
# 拼接再展平
box_cls = torch.cat(box_cls_flattened, dim=1).flatten(0, -2) # start_dim, end_dim
box_regression = torch.cat(box_regression_flattened, dim=1).reshape(-1, 4)
3.5 permute_and_flatten函数:
该函数的作用是:调整tensor顺序,并进行reshape。
传入参数:
| 参数 | 意义 |
|---|---|
| layer | 预测特征层上预测的目标概率或bboxes regression参数 |
| N | batch_size |
| A | 每个单元格anchor个数 |
| C | 类别个数 或者 4(4个坐标) |
| H | height |
| W | width |
该函数的内容如下,看注释:
# [batch_size, ... , anchors_num_per_position * (C or 4), height, width]
layer = layer.view(N, -1, C, H, W)
# 调换tensor维度
layer = layer.permute(0, 3, 4, 1, 2) # [N, H, W, -1, C],这里的0、1、2等表示(N, -1, C, H, W)的索引
# view和reshape功能是一样的,先展平所有元素在按照给定shape排列
# view函数只能用于内存中连续存储的tensor,permute等操作会使tensor在内存中变得不再连续,此时就不能再调用view函数
# reshape则不需要依赖目标tensor是否在内存中是连续的
layer = layer.reshape(N, -1, C)
4. 总结:
本篇介绍了RPN的详细实现过程,也是Faster-RCNN中最重要的部分之一。