k8s编程operator实战之云编码平台——②controller初步实现
文章目录
-
- 1、工作空间镜像制作
- 2、controller实现
-
- 2.1 使用kubebuilder创建工程
- 2.2 代码实现
-
- 2.2.1 引入grpc
- 2.2.2 实现CloudIdeService
-
- StatusInformer的实现
- CloudSpaceService定义
- 方法CreateSpaceAndWaitForRunning
- 方法GetPodSpaceInfo
- 方法DeleteSpace
- 方法GetPodSpaceStatus
- 2.2.3 controller实现
-
- SetupWithManager
- Reconcile
- 2.2.4 启动grpc server以及优雅退出服务器
-
- StartGrpcServer
- SetupSignal
- 2.2.5 目录结构
- 3、测试
-
- 3.1 创建工作空间并且等待运行
- 3.2 获取Pod状态
- 3.3 获取pod信息
- 3.4 删除pod
- 总结
k8s编程operator系列:
k8s编程operator——(1) client-go基础部分
k8s编程operator——(2) client-go中的informer
k8s编程operator——(3) 自定义资源CRD
k8s编程operator——(4) kubebuilder & controller-runtime
k8s编程operator实战之云编码平台——①架构设计
k8s编程operator实战之云编码平台——②controller初步实现
k8s编程operator实战之云编码平台——③Code-Server Pod访问实现
k8s编程operator实战之云编码平台——④web后端实现
k8s编程operator实战之云编码平台——⑤项目完成、部署
在上一章中介绍了整个云编码平台的架构设计,本章中将实现架构中的controller。需要使用的技术:
k8s二次开发kubebuilder、 grpc
controller用来创建、删除、获取Pod信息以及状态的维护。
1、工作空间镜像制作
首先我们要制作code-server的docker镜像,先来制作一个含有go运行环境的工作空间镜像,工具包括:go sdk、make、git
首先创建一个文件夹用来存放我们制作镜像需要的文件:
mkdir go_template
1、下载code-server
下载code-server v4.9.0版本:
下载的网址为:https://github.com/coder/code-server/releases
wget https://github.com/coder/code-server/releases/download/v4.9.0/code-server-4.9.0-linux-amd64.tar.gz
2、下载go sdk,版本为v1.19.4
下载地址:https://golang.google.cn/dl/
wget https://golang.google.cn/dl/go1.19.4.linux-amd64.tar.gz
3、编写Dockerfile
Dockerfile如下:
- 基础镜像使用ubuntu:20.04
- 14、15行为安装必要的软件
- 16行安装git
- 在启动code-server时不使用密码验证,默认打开/root/workspace文件
FROM ubuntu:20.04
WORKDIR /.workspace
COPY code-server-4.9.0-linux-amd64.tar.gz .
COPY go1.19.4.linux-amd64.tar.gz .
RUN tar zxvf code-server-4.9.0-linux-amd64.tar.gz && \
rm -f code-server-4.9.0-linux-amd64.tar.gz && \
tar zxvf go1.19.4.linux-amd64.tar.gz -C /usr/local && \
rm -f go1.19.4.linux-amd64.tar.gz && \
mkdir -p /root/workspace /go/{src,pkg,bin} && \
apt-get -y update && \
apt-get -qq update && \
apt-get -qq install -y --no-install-recommends ca-certificates curl && \
apt install git
ENV GO111MODULE on
ENV GOPROXY https://goproxy.cn,direct
ENV GOROOT /usr/local/go
ENV PATH /usr/local/go/bin:$PATH
ENV GOPATH /go
ENV PATH $GOPATH/bin:$PATH
WORKDIR /.workspace/code-server-4.9.0-linux-amd64
EXPOSE 9999
CMD ["./bin/code-server", "--port", "9999", "--host", "0.0.0.0", "--auth", "none", "--disable-update-check", "--open", "/root/workspace/"]
4、构建镜像
在go_template中构建镜像,需要将code-server、go sdk和Docker都放在该文件夹下,也不要放多余的其它文件
docker build -t code-server-go1.19:v0.1 .
构建查看镜像(我的镜像名为mangohow/code-server-go1.19):
![]()
5、push到docker hub
在构建完成后,最好将镜像推送到dockerhub或者其它镜像仓库中
首先要给镜像打一个tag,yourUsername为你的镜像仓库的用户名
docker tag code-server-go1.19:v0.1 yourUsername/code-server-go1.19:v0.1
推送到镜像仓库
# 先登录
docker login
docker push yourUsername/code-server-go1.19:v0.1
2、controller实现
controller的实现直接使用kubebuilder,它会为我们生成一套模板代码
注意:最好直接在linux上编码,在windows上有很多问题
2.1 使用kubebuilder创建工程
1、创建文件夹
mkdir cloud-ide-k8s-controller
cd cloud-ide-k8s-controller/
2、创建工程
# 初始化
go mod init cloud-ide-k8s-controller
kubebuilder init

# 创建api
kubebuilder create api --group cloud-ide --version v1 --kind Pod
由于我们没有创建自定义资源,所以在Create Resource选择中选择n

到此,工程已经创建完毕,开始编码
2.2 代码实现
2.2.1 引入grpc
Pod的创建、删除以及信息查询等工作我们都在controller中实现,然后通过grpc的方式提供给web后端来使用。
使用grpc需要安装protobuf和proto-gen-go,关于这部分的安装在此就不再介绍,网上教程很多。
1、grpc的proto文件定义
首先先实现四个grpc service:
createSpaceAndWaitForRunning:创建Pod并且等待Pod的状态变为Running,当我们在创建Pod后,它需要一段时间来启动,在这段时间之间是无法访问的,因此我们需要等待它启动完成后再返回
deleteSpace:删除Pod
getPodSpaceStatus:获取Pod运行的状态
getPodSpaceInfo:获取Pod的信息
在工程中创建pb/proto文件夹,然后创建proto文件:
service.proto如下:
syntax = "proto3";
package pb;
option go_package = "./;pb";
// 限制用户的工作空间的资源使用,有CPU、内存和存储的大小限制
message ResourceLimit {
string cpu = 1;
string Memory = 2;
string Storage = 3;
}
// 在创建Pod时,需要webserver提供要创建的Pod的信息
// 其中有:Pod的名称、Pod的命名空间、使用的镜像、以及要使用的端口和资源限制
message PodInfo {
string name = 1;
string namespace = 2;
string image = 3;
uint32 port = 4;
ResourceLimit resourceLimit = 5;
}
message Response {
int32 status = 1;
string message = 2;
}
message QueryOption {
string name = 1;
string namespace = 2;
}
message PodStatus {
int32 status = 1;
string message = 2;
}
message PodSpaceInfo {
string nodeName = 1;
string ip = 2;
int32 port = 3;
}
service CloudIdeService {
// 创建云IDE空间并等待Pod状态变为Running
rpc createSpaceAndWaitForRunning(PodInfo) returns (PodSpaceInfo);
// 删除云IDE空间
rpc deleteSpace(QueryOption) returns (Response);
// 获取Pod运行状态
rpc getPodSpaceStatus(QueryOption) returns (PodStatus);
// 获取云IDE空间Pod的信息
rpc getPodSpaceInfo(QueryOption) returns (PodSpaceInfo);
}
生成代码:
protoc --go_out=plugins=grpc:./pb ./pb/proto/*.proto
可以将这个命令加到makefile中,以后在使用就更方便了,可以直接使用make proto
2.2.2 实现CloudIdeService
创建cloudspaceservice.go实现CloudIdeService接口
要实现的方法总共有四个:
type CloudIdeServiceClient interface {
// 创建云IDE空间并等待Pod状态变为Running
CreateSpaceAndWaitForRunning(ctx context.Context, in *PodInfo, opts ...grpc.CallOption) (*PodSpaceInfo, error)
// 删除云IDE空间
DeleteSpace(ctx context.Context, in *QueryOption, opts ...grpc.CallOption) (*Response, error)
// 获取Pod运行状态
GetPodSpaceStatus(ctx context.Context, in *QueryOption, opts ...grpc.CallOption) (*PodStatus, error)
// 获取云IDE空间Pod的信息
GetPodSpaceInfo(ctx context.Context, in *QueryOption, opts ...grpc.CallOption) (*PodSpaceInfo, error)
}
CreateSpaceAndWaitForRunning:给ApiServer发送请求创建Pod,并且等待Pod处于运行状态后在返回。
DeleteSpace:删除指定的Pod
GetPodSpaceStatus:获取Pod的运行状态,Pod是否存在
GetPodSpaceInfo:获取Pod的ip和port信息
等待Pod处于运行状态
Pod在刚创建时处于Pending状态,当Pod启动完毕后,会处于Running状态,因为我们要监视Pod的状态,当它的状态变为Runnging时,就通知我们的CreateSpaceAndWaitForRunning方法Pod已经就绪。
要监视Pod的状态可以通过client go的informer来实现,使用kubebuilder生成的工程中已经有现成的模板代码,也就是我们只需要在controller中实现Reconcile方法即可。
我们可以实现一个通知器,其中含有map[string]chan struct{},当我们在CreateSpaceAndWaitForRunning方法中请求ApiServer创建Pod后,就向map中添加一个键值对 key:podname val: chan,然后从chan中读取数据,由于Pod还未准备就绪,因此读取空的chan将会导致阻塞。在Reconcile中当监视到Pod的状态变为Running后,就向chan中发送消息。另一端就可以收到Pod已经就绪的通知。
StatusInformer的实现
package statussync
import (
"errors"
"sync"
)
var (
ErrNotFound = errors.New("not Found")
)
// StatusInformer 状态同步通知器,当Pod状态处于Running时,通知对端
type StatusInformer struct {
sync.Mutex
m map[string]chan struct{}
}
func NewManager() *StatusInformer {
return &StatusInformer{
m: make(map[string]chan struct{}),
}
}
// 向map中添加一个chan
func (m *StatusInformer) Add(name string) <-chan struct{} {
m.Lock()
defer m.Unlock()
ch := make(chan struct{}, 1)
m.m[name] = ch
return ch
}
func (m *StatusInformer) Delete(name string) {
m.Lock()
defer m.Unlock()
delete(m.m, name)
}
// 同步消息
func (m *StatusInformer) Sync(name string) error {
m.Lock()
defer m.Unlock()
ch, ok := m.m[name]
if !ok {
return ErrNotFound
}
ch <- struct{}{}
return nil
}
CloudIdeService接口实现:
CloudSpaceService定义
在CloudSpaceService的字段有三个,分别是:client、logger和statusInformer
client可以对Pod进行CRUD,在查询时会查询本地的缓存
package service
import (
"context"
"fmt"
"github.com/go-logr/logr"
"github.com/mangohow/cloud-ide-k8s-controller/pb"
"github.com/mangohow/cloud-ide-k8s-controller/tools/statussync"
v1 "k8s.io/api/core/v1"
metav1 "k8s.io/apimachinery/pkg/apis/meta/v1"
"sigs.k8s.io/controller-runtime/pkg/client"
)
var (
ResponseSuccess = &pb.Response{Status: 200, Message: "success"}
ResponseFailed = &pb.Response{Status: 400, Message: "failed"}
)
const (
PodNotExist int32 = iota
PodExist
)
type CloudSpaceService struct {
client client.Client // client可用于pod的CRUD
logger *logr.Logger
statusInformer *statussync.StatusInformer
}
func NewCloudSpaceService(client client.Client, logger *logr.Logger, manager *statussync.StatusInformer) *CloudSpaceService {
return &CloudSpaceService{
client: client,
logger: logger,
statusInformer: manager,
}
}
var podTpl = &v1.Pod{
TypeMeta: metav1.TypeMeta{
Kind: "Pod",
APIVersion: "v1",
},
ObjectMeta: metav1.ObjectMeta{
Labels: map[string]string{
"kind": "cloud-ide",
},
},
}
方法CreateSpaceAndWaitForRunning
在Pod的定义中一定要将镜像的拉取策略改为IfNotPresent,之前这个字段没有填。每次在创建工作空间的时候,都要等30~40s,后来我才发现,默认的策略是Always,也就是每次创建工作空间的时候都会从dockerhub拉取镜像,所以才导致这么慢。修改后,启动工作空间就只需要不到5s。
在Resources中,我将代码注释了,因为我的虚拟机配置太低,如果不注释,那么在创建Pod时就可能会因为资源不足而导致Pod创建失败。
// CreateSpaceAndWaitForRunning 创建一个云IDE空间, 并等待Pod的状态变为Running
func (s *CloudSpaceService) CreateSpaceAndWaitForRunning(ctx context.Context, info *pb.PodInfo) (*pb.PodSpaceInfo, error) {
// 1、获取一个Pod的深拷贝
pod := podTpl.DeepCopy()
// 2、填充参数
s.fillPod(info, pod)
// 3、创建Pod
err := s.client.Create(context.Background(), pod)
if err != nil {
fmt.Printf("create pod:%s, info:%v\n", err.Error(), info)
return nil, err
}
// 4、向informer中添加chan,当Pod准备就绪时就会收到通知
ch := s.statusInformer.Add(pod.Name)
// 从informer中删除
defer s.statusInformer.Delete(pod.Name)
// 等待pod状态处于Running
<-ch
// 返回Pod的信息
return s.GetPodSpaceInfo(context.Background(), &pb.QueryOption{
Name: info.Name,
Namespace: info.Namespace,
})
}
func (s *CloudSpaceService) fillPod(info *pb.PodInfo, pod *v1.Pod) {
pod.Name = info.Name // 指定Pod名称
pod.Namespace = info.Namespace // 指定Pod的命名空间
pod.Spec.Containers = []v1.Container{
{
Name: info.Name, // 容器名称和Pod名称相同
Image: info.Image, // 容器的镜像
ImagePullPolicy: v1.PullIfNotPresent, // 镜像拉取策略
Ports: []v1.ContainerPort{
{
ContainerPort: int32(info.Port),
},
},
Resources: v1.ResourceRequirements{
//Limits: map[v1.ResourceName]resource.Quantity{
// v1.ResourceCPU: resource.MustParse(info.ResourceLimit.Cpu),
// v1.ResourceMemory: resource.MustParse(info.ResourceLimit.Memory),
//},
// 最小需求CPU2核、内存4Gi == 4 * 2^10
//Requests: map[v1.ResourceName]resource.Quantity{
// v1.ResourceCPU: resource.MustParse("2"),
// v1.ResourceMemory: resource.MustParse("4Gi"),
//},
},
},
}
}
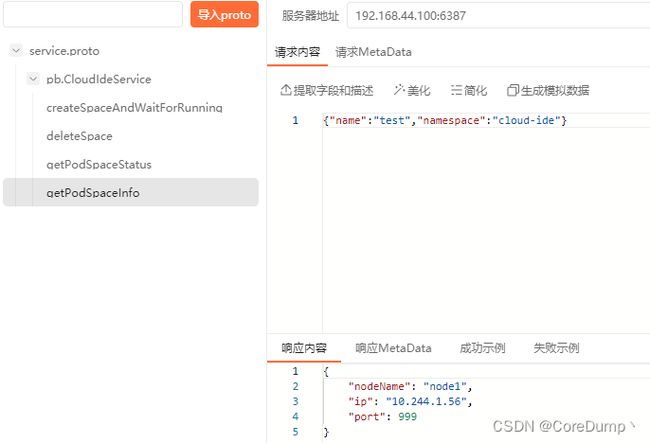
方法GetPodSpaceInfo
根据Pod名称以及命名空间查询Pod的Ip和port
func (s *CloudSpaceService) GetPodSpaceInfo(ctx context.Context, option *pb.QueryOption) (*pb.PodSpaceInfo, error) {
pod := v1.Pod{}
err := s.client.Get(context.Background(), client.ObjectKey{Name: option.Name, Namespace: option.Namespace}, &pod)
if err != nil {
s.logger.Error(err, "get pod space info")
return &pb.PodSpaceInfo{}, err
}
return &pb.PodSpaceInfo{NodeName: pod.Spec.NodeName,
Ip: pod.Status.PodIP,
Port: pod.Spec.Containers[0].Ports[0].ContainerPort}, nil
}
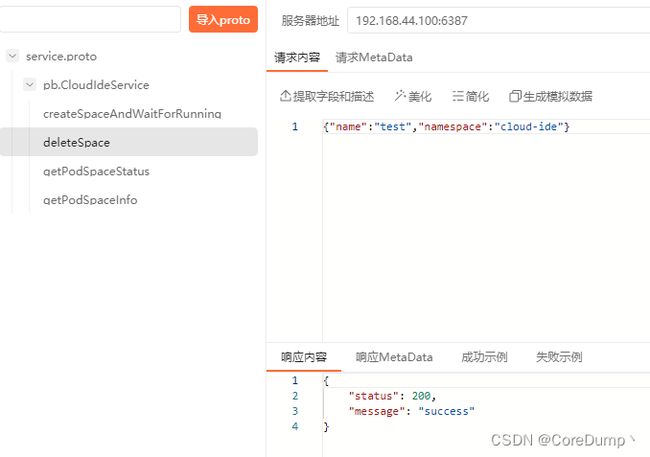
方法DeleteSpace
根据Pod的名称和命名空间删除Pod
// DeleteSpace 删除一个云空间
func (s *CloudSpaceService) DeleteSpace(ctx context.Context, option *pb.QueryOption) (*pb.Response, error) {
pod := v1.Pod{
ObjectMeta: metav1.ObjectMeta{
Name: option.Name,
Namespace: option.Namespace,
},
}
err := s.client.Delete(context.Background(), &pod)
if err != nil {
s.logger.Error(err, "delete space")
return ResponseFailed, err
}
return ResponseSuccess, nil
}
方法GetPodSpaceStatus
根据Pod的名称和命名空间获取Pod的运行状态
func (s *CloudSpaceService) GetPodSpaceStatus(ctx context.Context, option *pb.QueryOption) (*pb.PodStatus, error) {
pod := v1.Pod{}
err := s.client.Get(context.Background(), client.ObjectKey{Name: option.Name, Namespace: option.Namespace}, &pod)
if err != nil {
s.logger.Error(err, "get pod space status")
return &pb.PodStatus{Status: PodNotExist, Message: "NotExist"}, err
}
return &pb.PodStatus{Status: PodExist, Message: string(pod.Status.Phase)}, nil
}
2.2.3 controller实现
在pod_controller文件中,需要实现的方法主要有两个:Reconcile和SetupWithManager
type PodReconciler struct {
client.Client
Scheme *runtime.Scheme
statusInformer *statussync.StatusInformer // 添加statusInformer
}
SetupWithManager
在SetupWithManager方法中需要指定我们要监视的资源的类型,也就是Pod:
func (r *PodReconciler) SetupWithManager(mgr ctrl.Manager) error {
return ctrl.NewControllerManagedBy(mgr).
// Uncomment the following line adding a pointer to an instance of the controlled resource as an argument
For(&v1.Pod{}).
Complete(r)
}
Reconcile
在Reconciler中监视Pod的状态,当Pod处于running状态时,通知对端
func (r *PodReconciler) Reconcile(ctx context.Context, req ctrl.Request) (ctrl.Result, error) {
logger := log.FromContext(ctx)
// TODO(user): your logic here
pod := &v1.Pod{}
// 获取Pod
err := r.Client.Get(context.Background(), req.NamespacedName, pod)
if err != nil {
if !errors.IsNotFound(err) {
logger.Error(err, "get pod")
return ctrl.Result{Requeue: true}, err
}
}
fmt.Printf("name:%s, status:%s\n", pod.Name, pod.Status.Phase)
// 如果Pod的状态处于Running,通知对端Pod已经处于Running状态
if pod.Status.Phase == v1.PodRunning {
r.statusInformer.Sync(pod.Name)
}
return ctrl.Result{}, nil
}
2.2.4 启动grpc server以及优雅退出服务器
我们需要在main函数中启动我们的grpc服务器并注册服务。处理信号,当接收到退出的信号时退出grpc server和controller
StartGrpcServer
func StartGrpcServer(client client.Client, logger *logr.Logger, manager *statussync.StatusInformer) *grpc.Server {
// 创建listener
listener, err := net.Listen("tcp", ":6387")
if err != nil {
panic(fmt.Errorf("create grpc service: %v", err))
}
// 创建grpc server
server := grpc.NewServer()
// 注册我们的服务
pb.RegisterCloudIdeServiceServer(server, service.NewCloudSpaceService(client, logger, manager))
// 启动grpc server
go func() {
err := server.Serve(listener)
if err != nil && err == grpc.ErrServerStopped {
fmt.Printf("server stopped")
} else if err != nil {
panic(fmt.Errorf("start grpc server: %v", err))
}
}()
return server
}
SetupSignal
signal.go:
package signal
import (
"context"
"os"
"os/signal"
"syscall"
)
var onlyOneSignalHandler = make(chan struct{})
func SetupSignal(fns ...func()) context.Context {
// 当函数被调用两次,就会panic
close(onlyOneSignalHandler)
sigCh := make(chan os.Signal, 2)
signal.Notify(sigCh, syscall.SIGINT, syscall.SIGTERM, syscall.SIGQUIT)
ctx, cancel := context.WithCancel(context.Background())
go func() {
<-sigCh
for _, fn := range fns {
fn()
}
cancel()
// 第二次接收到信号,直接退出
<-sigCh
os.Exit(1)
}()
return ctx
}
main函数如下:
const WatchedNamespace = "cloud-ide"
func main() {
var metricsAddr string
var enableLeaderElection bool
var probeAddr string
flag.StringVar(&metricsAddr, "metrics-bind-address", ":8080", "The address the metric endpoint binds to.")
flag.StringVar(&probeAddr, "health-probe-bind-address", ":8081", "The address the probe endpoint binds to.")
flag.BoolVar(&enableLeaderElection, "leader-elect", false,
"Enable leader election for controller manager. "+
"Enabling this will ensure there is only one active controller manager.")
opts := zap.Options{
Development: true,
}
opts.BindFlags(flag.CommandLine)
flag.Parse()
ctrl.SetLogger(zap.New(zap.UseFlagOptions(&opts)))
mgr, err := ctrl.NewManager(ctrl.GetConfigOrDie(), ctrl.Options{
Scheme: scheme,
MetricsBindAddress: metricsAddr,
Port: 9443,
HealthProbeBindAddress: probeAddr,
LeaderElection: enableLeaderElection,
LeaderElectionID: "81275557.my.domain",
// LeaderElectionReleaseOnCancel defines if the leader should step down voluntarily
// when the StatusInformer ends. This requires the binary to immediately end when the
// StatusInformer is stopped, otherwise, this setting is unsafe. Setting this significantly
// speeds up voluntary leader transitions as the new leader don't have to wait
// LeaseDuration time first.
//
// In the default scaffold provided, the program ends immediately after
// the manager stops, so would be fine to enable this option. However,
// if you are doing or is intended to do any operation such as perform cleanups
// after the manager stops then its usage might be unsafe.
// LeaderElectionReleaseOnCancel: true,
Namespace: WatchedNamespace, // 指定要监视的Pod的namespace,我们的工作空间都创建在同一个命名空间下,只需监视这个命名空间下的Pod即可
})
if err != nil {
setupLog.Error(err, "unable to start manager")
os.Exit(1)
}
// 创建statusInfomer
manager := statussync.NewManager()
if err = controllers.NewPodReconciler(mgr.GetClient(), mgr.GetScheme(), manager).SetupWithManager(mgr); err != nil {
setupLog.Error(err, "unable to create controller", "controller", "Pod")
os.Exit(1)
}
//+kubebuilder:scaffold:builder
if err := mgr.AddHealthzCheck("healthz", healthz.Ping); err != nil {
setupLog.Error(err, "unable to set up health check")
os.Exit(1)
}
if err := mgr.AddReadyzCheck("readyz", healthz.Ping); err != nil {
setupLog.Error(err, "unable to set up ready check")
os.Exit(1)
}
// 启动grpc服务
grpcServer := StartGrpcServer(mgr.GetClient(), &ctrl.Log, manager)
// 安装信号处理
ctx := signal.SetupSignal(func() {
ctrl.Log.Info("receive signal, is going to shutdown")
grpcServer.GracefulStop()
})
setupLog.Info("starting manager")
if err := mgr.Start(ctx); err != nil {
setupLog.Error(err, "problem running manager")
os.Exit(1)
}
}
2.2.5 目录结构
目录结构如下:

3、测试
接下来测试各个功能,由于我们的服务是通过grpc的方式提供的。可以使用ApiPost7来发送请求,ApiPost7支持grpc接口的调用,免费的。
官网:https://www.apipost.cn/
3.1 创建工作空间并且等待运行
启动我们的controller,可以使用make来启动:
make run
# 或者编译后再启动,编译后的文件为bin/manager
make build
使用ApiPost创建一个grpc,将service.proto导入
调用CreateSpaceAndWaitForRunning接口创建pod

controller的输出如下:

查看pod:
![]()
3.2 获取Pod状态

3.3 获取pod信息
3.4 删除pod
![]()
总结
至此,controller已经初步实现了功能,可以实现Pod的创建、删除、Pod状态获取、Pod信息获取
github地址:https://github.com/mangohow/cloud-ide-k8s-controller