- 变频器:原理、应用及其在现代工业与生活中的节能与智能控制作用
智能科技前沿
人工智能科技生活单片机嵌入式硬件
创作不易,您的打赏、关注、点赞、收藏和转发是我坚持下去的动力!1.变频器的原理变频器(Inverter),是一种将固定频率的交流电(通常是50Hz或60Hz)转换为可变频率和电压的交流电的电气设备。其工作原理是基于电力电子技术和控制理论的应用,能够通过改变供给电机的电源频率来控制电动机的速度和扭矩。变频器的基本工作原理可以分为以下几个阶段:整流:首先,将输入的交流电(AC)通过整流器(通常是二极管
- 移动订货小程序哪个好 批发订货系统源码哪个好
多用户商城系统
订货系统源码移动订货小程序批发订货系统订货系统源码
订货小程序就是依托微信小程序的订货系统,微信小程序订货系统相较于其他终端的订货方式,能够更快进入商城,对经销商而言更为方便。今天,我们一起盘点三个主流的移动订货小程序,看看哪个移动订货小程序好。第一、核货宝订货小程序核货宝是商淘科技旗下的订货系统,可为批发企业提供不同客户不同商品、不同客户不同价格快速订货和商家账期管理。功能介绍:客户批发订货的专属数字化订货系统,可以移动端订货。与传统手写开单相比
- rabbitmq
楚楚ccc
Java系列rabbitmq分布式
1.消息服务概述、rabbitmq核心概念消息服务概述:大多数应用中,可通过消息服务中间件来提升系统异步通信,扩展解耦能力两个重要概念:消息代理(messagebroker)和目的地(destination)。当消息发送者者发出消息后,将由消息代理接管,消息代理保证将消息传递至目的地两种形式的目的地:队列(queue):点对点的消息通信(point-to-point)主题(topic):发布(pu
- HalconDotNet中的图像视频采集
0仰望星空007
音视频数码相机计算机视觉HalconC#
文章目录1.单相机视频图像采集2.多相机视频图像采集3.设置相机曝光时间4.实时图像显示5.图像采集与保存1.单相机视频图像采集 使用HalconDotNet进行单相机视频图像采集的基本步骤包括初始化相机、设置采集参数、开始采集、处理图像以及停止采集。usingHalconDotNet;publicvoidSingleCameraCapture(){HFramegrabberframegrabb
- 框架必知必会——Autofac概述及应用
Matrix Y
WPFwpfautofac
Autofac概述Autofac是一个依赖注入框架,它遵循控制反转(InversionofControl,IoC)原则,通过构造函数注入、属性注入等方式来管理对象的依赖关系。它的核心原理是将对象的创建和生命周期管理交给容器,而不是在代码中手动管理。Autofac的作用主要有以下几点解耦:通过依赖注入,将组件的创建和依赖关系从业务逻辑中分离,使代码更加模块化和可维护。管理生命周期:可以控制对象的生命
- 六边形六边形架构(Hexagonal Architecture),也被称为端口和适配器架构(Ports and Adapters Architecture),是一种软件架构模式,用于构建可测试、可维护
leijmdas
golang
六边形架构(HexagonalArchitecture),也被称为端口和适配器架构(PortsandAdaptersArchitecture),是一种软件架构模式,用于构建可测试、可维护和灵活的应用程序。这种架构模式的核心思想是将应用程序的核心业务逻辑(Domain)与外部系统(Ports)和适配器(Adapters)解耦,使得核心业务逻辑独立于具体的技术实现和外部依赖。在六边形架构中,核心业务逻
- 今日之感悟
了不起的梦迪
1.你可以允许自己偶尔的放纵,但是决不能在这种状态下沉溺太久。2.当你不行的时候就找到比你行的人,然后简单相信听话照做。3.每个人都需要被爱,被激励,被理解,被呵护,被欣赏,你是这样,身边的人也是如此,要做一个给他人带来光能够为他人赋能的人。4.余生的每一天都要过得开心,跟自己喜欢和让自己舒服的人在一起。5.年龄不能定义一个人,一个人年轻的心态和对生活的热情是她最大的魅力。6.时间就像是海绵里的水
- React项目中使用发布订阅模式
恩婧
react.js前端前端框架发布订阅模式
React项目中使用发布订阅模式1.创建发布订阅器2.在组件中使用发布订阅器3.订阅数据发布订阅模式(也称观察者模式)是一种管理跨组件通信的有效方式,尤其是在不希望直接依赖于特定组件的情况下。这种模式允许一个对象(发布者)通知多个其他对象(订阅者),而不必知道这些对象是谁或他们在哪里。这有助于解耦组件,使得代码更加模块化和可维护。1.创建发布订阅器创建一个发布订阅器类,负责管理时间的注册、取消和触
- zookeeper+kafka消息队列部署
TBF610218
zookeeperkafka分布式
消息队列的概念什么是消息队列消息是指在应用间传送的数据消息队列是一种应用间的通信方式解决方法,确保消息的可靠传递专门为消息做缓存的消息队列的特征存储将消息存储在某个类型的缓冲区中,指导目标进读取这些消息或者将其从消息队列中显示移除为止异步消息队列通过缓冲消息可以在应用程序当中公开一定程度的异步性,允许源进程发送消息并在队列当中累积消息,而且目标进程可以挑选消息并进行处理为什么需要消息队列解耦冗余扩
- Jetpack Compose 架构如何选?MVP 、 MVVM 还是 MVI?
goodhighting
程序员架构
首先,先看看不借助任何架构的Compose代码是怎样的?不使用架构的情况下,逻辑代码将与UI代码耦合在一起,在Compose中这种弊端显得尤为明显。常规Android开发默认引入了MVC思想,XML的布局方式使得UI层与逻辑层有了初步的解耦。但是Compose中,布局和逻辑同样都使用Kotlin实现,当布局中夹了杂逻辑,界限变得更加模糊。此外,ComposeUI中混入逻辑代码会带来更多的潜在隐患。
- 在JavaScript中实现简单的发布/订阅模式
2401_85812053
javascript开发语言ecmascript
在现代Web开发中,发布/订阅模式是一种常见的设计模式,它允许不同部分的应用程序之间进行解耦和通信。这种模式特别适用于事件驱动的编程模型,能够有效地管理复杂的交互和数据流。本文将详细介绍如何在JavaScript中实现一个简单的发布/订阅模式,包括其工作原理、实现步骤以及实际应用示例。1.理解发布/订阅模式发布/订阅模式是一种消息传递模式,允许对象之间进行通信而不需要彼此直接引用。它主要由两个角色
- 2021-04-14
飞鹿沁雪
1.读经读经,以读为主,没说理解。所以家长糊涂,把读经和解经混为一谈。不能因为读了不理解就不读了,而是应该跟着音频读,他怎么读我们就怎么读,简单相信,听话照做。红军二万五千里长征的秘诀就是跟着走呗。2.要想培养好孩子,我们先要给孩子做好榜样,一定要每天抽出半个小时,用心地陪伴孩子读经典。从小带着孩子读经典,让孩子爱上阅读,可以影响孩子一辈子。对于热爱阅读的孩子,读书是一种享受,是一种休息。3.我们
- 重修设计模式-创建型-工厂模式
丶白泽
重修设计模式设计模式java开发语言
重修设计模式-创建型-工厂模式一、概述工厂模式(FactoryPattern)是设计模式中非常基础且常用的一种模式,主要目的是通过封装对象的创建过程,从而实现代码的解耦和灵活性的提升。工厂模式的核心思想封装对象的创建:将对象的创建过程封装起来,使得客户端不必直接创建对象,而是通过工厂类来间接创建对象。解耦:将对象的创建与使用分离,使得客户端只需要知道如何使用对象,而不需要知道如何创建对象。提高扩展
- C++设计模式(观察者模式)
抓哇能手
设计模式观察者模式c++linux开发语言
观察者模式是一种软件设计模式。一、定义与概念在观察者模式中,存在被观察的对象(主题)和观察这个对象的观察者。主题在自身状态发生变化时,会通知所有注册的观察者,让它们能够做出相应的反应。二、作用与优势1.解耦:主题和观察者之间的依赖关系被弱化,它们之间通过抽象接口进行交互,使得双方的变化不会直接影响到对方,提高了系统的可维护性和可扩展性。2.灵活性:可以在运行时动态地添加、删除观察者,方便系统的扩展
- 【硬件工程师面经整理12_逆变器篇】
LeeYLong
硬件工程师面经硬件工程面试经验分享学习方法学习
文章目录逆变器1.1半桥逆变(half-bridgeinverter)电路1.2全桥逆变(H-bridgeinverter)1.3H桥电路结构,用的是什么管子,有没有出现问题,怎么解决的逆变器逆变电路的基本工作原理单相桥式逆变电的电阻负载简化电路图其基本工作原理是:0-t1时间段开关T1和T4闭合,负载电压为正;2)t1-T时间段开关T3和T2闭合,负载电压为负。其负载电流的变化在电阻负载下是与电
- java 接口创建对象
专注API从业者
经验分享电商平台API接口java开发语言大数据数据库数据挖掘
Java接口创建对象:深度解析与示例在Java编程中,接口是一种非常重要的概念。它不仅为不同类之间的交互提供了规范,也促进了代码的重用和解耦。本文将深入探讨如何在Java中使用接口创建对象,带您理解这一关键特性。什么是接口?接口(Interface)是一种特殊的抽象类,定义了一组方法的声明,但不提供具体的实现。接口允许我们定义类的方法,而不需要指定它们是什么。这使得接口在Java中成为实现多态性、
- 《财富的智慧》复盘
遇见很好的自己
2022.4.16姚秀风一[新知]1.系统思维:第一:面——体第二:AxB不是简单相加第三:体与体形成新事物2变现思维:第一:离行为最近的思维。第二:变现思维不能单独存在。第三:是一种连接体。上连目标,左连社会规则,右连人脉关系,下连认知。3基石思维第一:基石思维来自本人内心遵循原则第二:基石思维来自于认知系统的功能。第三:基石思维是实现目标的有效路径。4破局思维第一:从0~1第二:0~1初期发展
- 设计模式-命令模式(行为型)
NealLemon
定义将不同的请求封装成不同的对象。适用场景解决了应用程序中对象的职责以及他们之间的通信方式。发送者和接收者完全解耦需要抽象出等待执行的行为优点降低耦合易扩展下达一组命令缺点命令的无限扩展会增加类的数量,提高系统的复杂度。代码其实命令模式的核心就是将一个命令(方法)抽象成一个对象。我们来选择一个场景在我们军训的时候,会收到教官各式各样的命令,比如:立正稍息我们就来拿代码模拟一下简单的命令模式吧。命令
- 561. 数组拆分 递归思想 数学规律 python 力扣
西柚与蓝莓
力扣递归pythonleetcode算法
561.数组拆分已解答简单相关标签相关企业提示给定长度为2n的整数数组nums,你的任务是将这些数分成n对,例如(a1,b1),(a2,b2),...,(an,bn),使得从1到n的min(ai,bi)总和最大。返回该最大总和。示例1:输入:nums=[1,4,3,2]输出:4解释:所有可能的分法(忽略元素顺序)为:1.(1,4),(2,3)->min(1,4)+min(2,3)=1+2=32.(
- Java面试复习总结03
ok!ko
java面试开发语言
Java面试复习总结031、什么是SPI?2、SPI和API有什么区别?3、使用SPI机制的原因?4、SPI机制的优缺点?1、什么是SPI?SPI即ServiceProviderInterface,字面意思就是:“服务提供者的接口”,我的理解是:专门提供给服务提供者或者扩展框架功能的开发者去使用的一个接口。SPI将服务接口和具体的服务实现分离开来,将服务调用方和服务实现者解耦,能够提升程序的扩展性
- 【电子电力】带LCL滤波器的滞后电流控制单相并网光伏逆变器系统
梦想科研社
matlab
摘要带LCL滤波器的滞后电流控制单相并网光伏逆变器系统是一种用于将太阳能光伏发电并入电网的高效电力转换系统。滞后电流控制方式通过快速响应和高精度的电流跟踪,确保了电力的高质量输出,而LCL滤波器则有效减少了逆变器产生的谐波干扰,提高了并网电流的质量。本研究探讨了该系统的工作原理、实验结果及其在实际应用中的表现。理论单相并网光伏逆变器系统的主要功能是将光伏组件产生的直流电转换为交流电,并以高质量的电
- Docker容器编程
neo_Ggx23
服务器docker容器javanginxredis
文章目录安装、卸载、配置镜像加速数据卷volume网络通讯DockerCompose容器编排docker-compose.yml命令清单相关实战Docker启动MySQL镜像Docker启动YapiDocker部署前后端分离项目安装、卸载、配置镜像加速卸载$sudoyumremovedocker\docker-client\docker-client-latest\docker-common\do
- 深入探讨 RabbitMQ 的整体架构:消息传递的核心机制
需要重新演唱
rabbitmq架构ruby
深入探讨RabbitMQ的整体架构:消息传递的核心机制引言在现代分布式系统中,消息队列(MessageQueue)是实现异步通信和解耦的重要工具。RabbitMQ是一个广泛使用的开源消息代理,提供了可靠的消息传递机制。本文将深入探讨RabbitMQ的整体架构,帮助你理解其核心组件和工作原理。无论你是初学者还是有经验的开发者,这篇文章都将为你提供全面而深入的理解。什么是RabbitMQ?Rabbit
- 7月24日+14号怡然+《如何阅读》+21天阅读写作自律计划
橙色温度
今日金句:往事不可谏,来者犹可追---孔子《论语·微子》图片发自App第六章本章学习批判式阅读:如何读透一本书。摆脱被动接受作者观点的状态,主动提问并寻找答案。阅读有的时候更是与作者的一种思想的交流,我十分同意这种看法。首先我们来划重点:有效阅读是思想的交流,而非单相交谈。你需要摆脱自言自语接受作者观点的状态,转为双向交流,主动提问并寻找答案,这种阅读方式称为“批判式阅读”。批判式阅读主要针对非虚
- 不成伴侣,必成陌路
吴庞炜
刚刚看了《一场暗恋,大学四年》的文章,没有圆满的暗恋,只是一个人一厢情愿的单相思,一段放弃不甘求之不得的无奈地透过写实的文字,让人看到了痴女的坚忍与执著。虽然不能成功,但是为了不过早的见不着心上人,直到毕业前才开始勇敢且试探的表白。没有大学里一般恋人的卿卿我我,只为一丝怦然心动的好感而坚持等候四年,确实是很有耐心的坚守着。四年之后的不舍与缅怀。与其说此文在述说着求之不得的无奈,不如说是表白之后的牵
- 观察者模式
榴月~
Java观察者模式java
在观察者设计模式中,一个对象(被观察者)维护一系列依赖于它的对象(观察者),当被观察者的状态发生变化时,它会通知所有的观察者。使用观察者模式可以实现解耦,被观察者不需要关心观察者的具体实现,观察者只需注册到被观察者即可。场景描述:我们可以将一个气象站作为"被观察者"(WeatherStation),它会定期检测温度、湿度和气压。多个显示面板作为"观察者"(Observer),当气象站更新天气信息时
- 设计模式-桥接模式-bridge pattern
WeSiGJ
C++设计模式设计模式桥接模式c++
系列文章目录文章目录系列文章目录设计模式-桥接模式-bridgepatternOverview1.桥接模式(BridgePattern)1.1.桥接模式的主要角色包括1.2.C++实现示例1.3.桥接模式的应用场景2.桥接模式优缺点3.桥接模式使用场景4.在实际项目中,如何确保桥接模式的实现与抽象部分的解耦?关于作者设计模式-桥接模式-bridgepatternOverview桥接模式(Bridg
- 【Redis】Windows平台编译调试运行Redis,并附编译问题解决方案
Michael_Good
redisredis数据库缓存
最近想搞下消息任务架构,想使用消息发布订阅机制进行解耦,所以,计划借助redis的发布订阅机制思想进行实现。现在手头上只有Windows平台的环境,用vs跟下redis的执行逻辑。所以就找Windows平台的适配源码了。Windows-Redis源码开源路径:https://github.com/microsoftarchive/redis源码下载后:整体解决方案直接全部重新编译生成。编译问题解决
- 【事件驱动架构】CloudEvents和消息队列的区别
季邦邦
架构
CloudEvents和消息队列有以下几点主要区别:消息结构不同消息队列中的消息一般就是简单的字符串或字节数组,内容不固定。而CloudEvents定义了一组标准化的消息结构和字段,要求遵循这种规范。目标不同消息队列多用于内部系统间的解耦和削峰。CloudEvents主要用于系统之间的事件交互,实现事件驱动架构。跟踪能力不同消息队列无法很好的跟踪事件的产生源头和处理过程。而CloudEvents中
- C语言和设计模式(组合模式)
勤学-365
编程设计模式
文章目录一句话理解组合模式中的角色组合模式实现步骤实际场景举例一句话理解又叫做“整体-部分模式”,它使树型结构的问题中,模糊了简单元素和复杂元素的概念,客户程序可以像处理简单元素一样来处理复杂元素,从而使得客户程序与复杂元素的内部结构解耦组合模式中的角色1、抽象组件类(Component):组合中的对象声明接口,实现所有类共有接口的行为。声明用于访问和管理Component的子部件的接口。2、叶子
- 关于旗正规则引擎中的MD5加密问题
何必如此
jspMD5规则加密
一般情况下,为了防止个人隐私的泄露,我们都会对用户登录密码进行加密,使数据库相应字段保存的是加密后的字符串,而非原始密码。
在旗正规则引擎中,通过外部调用,可以实现MD5的加密,具体步骤如下:
1.在对象库中选择外部调用,选择“com.flagleader.util.MD5”,在子选项中选择“com.flagleader.util.MD5.getMD5ofStr({arg1})”;
2.在规
- 【Spark101】Scala Promise/Future在Spark中的应用
bit1129
Promise
Promise和Future是Scala用于异步调用并实现结果汇集的并发原语,Scala的Future同JUC里面的Future接口含义相同,Promise理解起来就有些绕。等有时间了再仔细的研究下Promise和Future的语义以及应用场景,具体参见Scala在线文档:http://docs.scala-lang.org/sips/completed/futures-promises.html
- spark sql 访问hive数据的配置详解
daizj
spark sqlhivethriftserver
spark sql 能够通过thriftserver 访问hive数据,默认spark编译的版本是不支持访问hive,因为hive依赖比较多,因此打的包中不包含hive和thriftserver,因此需要自己下载源码进行编译,将hive,thriftserver打包进去才能够访问,详细配置步骤如下:
1、下载源码
2、下载Maven,并配置
此配置简单,就略过
- HTTP 协议通信
周凡杨
javahttpclienthttp通信
一:简介
HTTPCLIENT,通过JAVA基于HTTP协议进行点与点间的通信!
二: 代码举例
测试类:
import java
- java unix时间戳转换
g21121
java
把java时间戳转换成unix时间戳:
Timestamp appointTime=Timestamp.valueOf(new SimpleDateFormat("yyyy-MM-dd HH:mm:ss").format(new Date()))
SimpleDateFormat df = new SimpleDateFormat("yyyy-MM-dd hh:m
- web报表工具FineReport常用函数的用法总结(报表函数)
老A不折腾
web报表finereport总结
说明:本次总结中,凡是以tableName或viewName作为参数因子的。函数在调用的时候均按照先从私有数据源中查找,然后再从公有数据源中查找的顺序。
CLASS
CLASS(object):返回object对象的所属的类。
CNMONEY
CNMONEY(number,unit)返回人民币大写。
number:需要转换的数值型的数。
unit:单位,
- java jni调用c++ 代码 报错
墙头上一根草
javaC++jni
#
# A fatal error has been detected by the Java Runtime Environment:
#
# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc=0x00000000777c3290, pid=5632, tid=6656
#
# JRE version: Java(TM) SE Ru
- Spring中事件处理de小技巧
aijuans
springSpring 教程Spring 实例Spring 入门Spring3
Spring 中提供一些Aware相关de接口,BeanFactoryAware、 ApplicationContextAware、ResourceLoaderAware、ServletContextAware等等,其中最常用到de匙ApplicationContextAware.实现ApplicationContextAwaredeBean,在Bean被初始后,将会被注入 Applicati
- linux shell ls脚本样例
annan211
linuxlinux ls源码linux 源码
#! /bin/sh -
#查找输入文件的路径
#在查找路径下寻找一个或多个原始文件或文件模式
# 查找路径由特定的环境变量所定义
#标准输出所产生的结果 通常是查找路径下找到的每个文件的第一个实体的完整路径
# 或是filename :not found 的标准错误输出。
#如果文件没有找到 则退出码为0
#否则 即为找不到的文件个数
#语法 pathfind [--
- List,Set,Map遍历方式 (收集的资源,值得看一下)
百合不是茶
listsetMap遍历方式
List特点:元素有放入顺序,元素可重复
Map特点:元素按键值对存储,无放入顺序
Set特点:元素无放入顺序,元素不可重复(注意:元素虽然无放入顺序,但是元素在set中的位置是有该元素的HashCode决定的,其位置其实是固定的)
List接口有三个实现类:LinkedList,ArrayList,Vector
LinkedList:底层基于链表实现,链表内存是散乱的,每一个元素存储本身
- 解决SimpleDateFormat的线程不安全问题的方法
bijian1013
javathread线程安全
在Java项目中,我们通常会自己写一个DateUtil类,处理日期和字符串的转换,如下所示:
public class DateUtil01 {
private SimpleDateFormat dateformat = new SimpleDateFormat("yyyy-MM-dd HH:mm:ss");
public void format(Date d
- http请求测试实例(采用fastjson解析)
bijian1013
http测试
在实际开发中,我们经常会去做http请求的开发,下面则是如何请求的单元测试小实例,仅供参考。
import java.util.HashMap;
import java.util.Map;
import org.apache.commons.httpclient.HttpClient;
import
- 【RPC框架Hessian三】Hessian 异常处理
bit1129
hessian
RPC异常处理概述
RPC异常处理指是,当客户端调用远端的服务,如果服务执行过程中发生异常,这个异常能否序列到客户端?
如果服务在执行过程中可能发生异常,那么在服务接口的声明中,就该声明该接口可能抛出的异常。
在Hessian中,服务器端发生异常,可以将异常信息从服务器端序列化到客户端,因为Exception本身是实现了Serializable的
- 【日志分析】日志分析工具
bit1129
日志分析
1. 网站日志实时分析工具 GoAccess
http://www.vpsee.com/2014/02/a-real-time-web-log-analyzer-goaccess/
2. 通过日志监控并收集 Java 应用程序性能数据(Perf4J)
http://www.ibm.com/developerworks/cn/java/j-lo-logforperf/
3.log.io
和
- nginx优化加强战斗力及遇到的坑解决
ronin47
nginx 优化
先说遇到个坑,第一个是负载问题,这个问题与架构有关,由于我设计架构多了两层,结果导致会话负载只转向一个。解决这样的问题思路有两个:一是改变负载策略,二是更改架构设计。
由于采用动静分离部署,而nginx又设计了静态,结果客户端去读nginx静态,访问量上来,页面加载很慢。解决:二者留其一。最好是保留apache服务器。
来以下优化:
- java-50-输入两棵二叉树A和B,判断树B是不是A的子结构
bylijinnan
java
思路来自:
http://zhedahht.blog.163.com/blog/static/25411174201011445550396/
import ljn.help.*;
public class HasSubtree {
/**Q50.
* 输入两棵二叉树A和B,判断树B是不是A的子结构。
例如,下图中的两棵树A和B,由于A中有一部分子树的结构和B是一
- mongoDB 备份与恢复
开窍的石头
mongDB备份与恢复
Mongodb导出与导入
1: 导入/导出可以操作的是本地的mongodb服务器,也可以是远程的.
所以,都有如下通用选项:
-h host 主机
--port port 端口
-u username 用户名
-p passwd 密码
2: mongoexport 导出json格式的文件
- [网络与通讯]椭圆轨道计算的一些问题
comsci
网络
如果按照中国古代农历的历法,现在应该是某个季节的开始,但是由于农历历法是3000年前的天文观测数据,如果按照现在的天文学记录来进行修正的话,这个季节已经过去一段时间了。。。。。
也就是说,还要再等3000年。才有机会了,太阳系的行星的椭圆轨道受到外来天体的干扰,轨道次序发生了变
- 软件专利如何申请
cuiyadll
软件专利申请
软件技术可以申请软件著作权以保护软件源代码,也可以申请发明专利以保护软件流程中的步骤执行方式。专利保护的是软件解决问题的思想,而软件著作权保护的是软件代码(即软件思想的表达形式)。例如,离线传送文件,那发明专利保护是如何实现离线传送文件。基于相同的软件思想,但实现离线传送的程序代码有千千万万种,每种代码都可以享有各自的软件著作权。申请一个软件发明专利的代理费大概需要5000-8000申请发明专利可
- Android学习笔记
darrenzhu
android
1.启动一个AVD
2.命令行运行adb shell可连接到AVD,这也就是命令行客户端
3.如何启动一个程序
am start -n package name/.activityName
am start -n com.example.helloworld/.MainActivity
启动Android设置工具的命令如下所示:
# am start -
- apache虚拟机配置,本地多域名访问本地网站
dcj3sjt126com
apache
现在假定你有两个目录,一个存在于 /htdocs/a,另一个存在于 /htdocs/b 。
现在你想要在本地测试的时候访问 www.freeman.com 对应的目录是 /xampp/htdocs/freeman ,访问 www.duchengjiu.com 对应的目录是 /htdocs/duchengjiu。
1、首先修改C盘WINDOWS\system32\drivers\etc目录下的
- yii2 restful web服务[速率限制]
dcj3sjt126com
PHPyii2
速率限制
为防止滥用,你应该考虑增加速率限制到您的API。 例如,您可以限制每个用户的API的使用是在10分钟内最多100次的API调用。 如果一个用户同一个时间段内太多的请求被接收, 将返回响应状态代码 429 (这意味着过多的请求)。
要启用速率限制, [[yii\web\User::identityClass|user identity class]] 应该实现 [[yii\filter
- Hadoop2.5.2安装——单机模式
eksliang
hadoophadoop单机部署
转载请出自出处:http://eksliang.iteye.com/blog/2185414 一、概述
Hadoop有三种模式 单机模式、伪分布模式和完全分布模式,这里先简单介绍单机模式 ,默认情况下,Hadoop被配置成一个非分布式模式,独立运行JAVA进程,适合开始做调试工作。
二、下载地址
Hadoop 网址http:
- LoadMoreListView+SwipeRefreshLayout(分页下拉)基本结构
gundumw100
android
一切为了快速迭代
import java.util.ArrayList;
import org.json.JSONObject;
import android.animation.ObjectAnimator;
import android.os.Bundle;
import android.support.v4.widget.SwipeRefreshLayo
- 三道简单的前端HTML/CSS题目
ini
htmlWeb前端css题目
使用CSS为多个网页进行相同风格的布局和外观设置时,为了方便对这些网页进行修改,最好使用( )。http://hovertree.com/shortanswer/bjae/7bd72acca3206862.htm
在HTML中加入<table style=”color:red; font-size:10pt”>,此为( )。http://hovertree.com/s
- overrided方法编译错误
kane_xie
override
问题描述:
在实现类中的某一或某几个Override方法发生编译错误如下:
Name clash: The method put(String) of type XXXServiceImpl has the same erasure as put(String) of type XXXService but does not override it
当去掉@Over
- Java中使用代理IP获取网址内容(防IP被封,做数据爬虫)
mcj8089
免费代理IP代理IP数据爬虫JAVA设置代理IP爬虫封IP
推荐两个代理IP网站:
1. 全网代理IP:http://proxy.goubanjia.com/
2. 敲代码免费IP:http://ip.qiaodm.com/
Java语言有两种方式使用代理IP访问网址并获取内容,
方式一,设置System系统属性
// 设置代理IP
System.getProper
- Nodejs Express 报错之 listen EADDRINUSE
qiaolevip
每天进步一点点学习永无止境nodejs纵观千象
当你启动 nodejs服务报错:
>node app
Express server listening on port 80
events.js:85
throw er; // Unhandled 'error' event
^
Error: listen EADDRINUSE
at exports._errnoException (
- C++中三种new的用法
_荆棘鸟_
C++new
转载自:http://news.ccidnet.com/art/32855/20100713/2114025_1.html
作者: mt
其一是new operator,也叫new表达式;其二是operator new,也叫new操作符。这两个英文名称起的也太绝了,很容易搞混,那就记中文名称吧。new表达式比较常见,也最常用,例如:
string* ps = new string("
- Ruby深入研究笔记1
wudixiaotie
Ruby
module是可以定义private方法的
module MTest
def aaa
puts "aaa"
private_method
end
private
def private_method
puts "this is private_method"
end
end

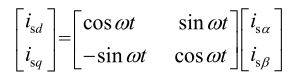
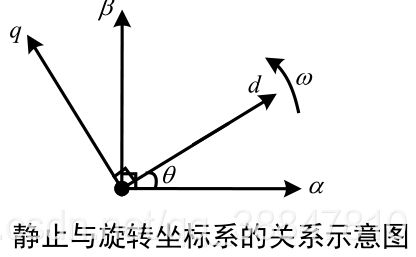 [ d q ] = [ cos ω t sin ω t − sin ω t cos ω t ] [ α β ] \begin{bmatrix} d\\ q \end{bmatrix}= \begin{bmatrix} \cos{\omega}t & \sin{\omega}t \\ -\sin{\omega}t & \cos{\omega}t \end{bmatrix} \begin{bmatrix} \alpha\\ \beta \end{bmatrix} [dq]=[cosωt−sinωtsinωtcosωt][αβ]
[ d q ] = [ cos ω t sin ω t − sin ω t cos ω t ] [ α β ] \begin{bmatrix} d\\ q \end{bmatrix}= \begin{bmatrix} \cos{\omega}t & \sin{\omega}t \\ -\sin{\omega}t & \cos{\omega}t \end{bmatrix} \begin{bmatrix} \alpha\\ \beta \end{bmatrix} [dq]=[cosωt−sinωtsinωtcosωt][αβ] 很容易可以写出dq轴关于 α β \alpha \beta αβ轴的关系。
很容易可以写出dq轴关于 α β \alpha \beta αβ轴的关系。