一维有限差分算法推导及MATLAB代码
一维有限差分法简介
本文从一维赫姆霍兹方程出发推导出了一维有限差分算法,写出对应matlab函数代码,并使用该函数画出三层波导结构模式分布图。
1、有限差分方法
起源:1928年第一次提出用五点差分估计求解椭圆拉普拉斯方程。
优势:无需改变原方程的形式,其解为强形式解(strong form solution),有限体积和有限元为若形式解。
2 求解差分估计的一般方法
一般来说,求解m阶偏导的表达式需要将泰勒展开到m阶,并使用m+1个节点。误差项为1阶。对于一个二阶线性常微分方程
d 2 ϕ d x 2 = S ϕ ( 1.1 ) \frac{d^2 \phi }{dx^2}=S_\phi \space (1.1) dx2d2ϕ=Sϕ (1.1)
x为自变量 ϕ \phi ϕ为应变量, S ϕ S_\phi Sϕ是x和 ϕ \phi ϕ的函数,为源项。在边界有边界条件为 ϕ ( x L ) = ϕ L ; ϕ ( x R ) = ϕ R \phi(x_L)=\phi_L;\phi(x_R)=\phi_R ϕ(xL)=ϕL;ϕ(xR)=ϕR。方程在开区间有效,满足区间类所有的点。对于不均匀的网格,求解拉普拉斯方程的差分项,有
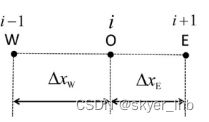
设有N个点,N-1段间隔,则第一个点和第N各点为边界条件,对于第i各点,在两侧进行泰勒展开,有:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Xq76MdRK-1669253340218)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps7.png)]](http://img.e-com-net.com/image/info8/581942b48f9147238edb4f03cc91af12.jpg)
(1.2)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SXpVZLXx-1669253340218)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps8.png)]](http://img.e-com-net.com/image/info8/dcc688dc1410435bab61ac7674f1fb07.jpg)
(1.3)
求解一阶偏导过程如下:去掉方程(1.2)、(1.1)的高阶项,将方乘(1.2)两边同时乘上系数A,方程(1.3)两边同时乘上系数B
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-38wJ7HU3-1669253340219)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps9.png)]](http://img.e-com-net.com/image/info8/4c79476fb6c14535909ecec5a050fa54.jpg) (1.4)
(1.4)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nBD9xOPw-1669253340219)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps10.png)]](http://img.e-com-net.com/image/info8/d63733263ca6437c9c2f7c7ee8a2100c.jpg) (1.5)
(1.5)
两式相加,为消去二阶偏导项,有
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TD8sEnc3-1669253340220)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps11.png)]](http://img.e-com-net.com/image/info8/64c40e164c3f45f7b2eed11bda1a6037.jpg)
解得:

所以一阶偏导项为:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cSYkbO2M-1669253340220)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps13.png)]](http://img.e-com-net.com/image/info8/876f99e354614f398d6ba304416f32e6.jpg) (1.6)
(1.6)
同理二阶偏导项为:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QikCrj5t-1669253340220)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps14.png)]](http://img.e-com-net.com/image/info8/76aa8be20dc549c1b284b89156691636.jpg) (1.7)
(1.7)
截止误差为:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-X19HOVqV-1669253340221)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps15.png)]](http://img.e-com-net.com/image/info8/133e4af463714c9e841e3a834930ddf4.jpg) (1.8)
(1.8)
二阶偏导的等式中不仅有结点值还有未知的高阶偏导项,忽略高阶偏导项,将原方程用差分方程表示:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-IwhhmRf5-1669253340221)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps16.png)]](http://img.e-com-net.com/image/info8/8d5df64cb70c4e89860eb84c7b0bc849.jpg)
,这里有N-2个等式,边界条件构成两个等式,即可求出各个点的值。
3 边界条件的应用
3.1 狄利克雷边界条件
应变量 ϕ \phi ϕ的值就在边界。
![]()
3.2 诺伊曼边界条件
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7FN7u02y-1669253340222)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps19.png)]](http://img.e-com-net.com/image/info8/f2ac85f8529945658227ad4e3b7cd419.jpg)
3.3 罗宾边界条件
在这种边界条件下,在边界处指定了因变量的值及其正态梯度的线性组合。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-llCWXiqa-1669253340222)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps20.png)]](http://img.e-com-net.com/image/info8/e9f8fb12d19c4e1e8de2ff857375aa52.jpg)
4.一维情况赫姆霍兹方程:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BmG4EuJ1-1669253340222)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps21.png)]](http://img.e-com-net.com/image/info8/56926211a68245d4b2e2fc72c5be2616.jpg) (3.1)
(3.1)
对于结点分布如下的情况

H P H_P HP的二阶导数可有左右两端点值线性表示
 (3.2)
(3.2)
差分后的一阶亥姆霍兹方程如下:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dqzn44l5-1669253340223)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps24.png)]](http://img.e-com-net.com/image/info8/bf9f4075da9448a9a9ab01d41fbb1903.jpg) (3.3)
(3.3)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-q5bWjLZ1-1669253340223)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps25.png)]](http://img.e-com-net.com/image/info8/62ad911ad8fb423b93920fe8ab328406.jpg) (3.4)
(3.4)
为消除其一阶导数项,令 ( 3.3 ) ⋅ e ϵ 2 2 , ( 3.4 ) ⋅ w ϵ 1 2 (3.3)\sdot \frac{e\epsilon_2}{2},(3.4)\sdot \frac{w\epsilon_1}{2} (3.3)⋅2eϵ2,(3.4)⋅2wϵ1得到
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SH4K7wIL-1669253340224)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps27.png)]](http://img.e-com-net.com/image/info8/d6a5d2eec811471385e3296486a9e241.jpg) (3.5)
(3.5)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-QEQB5j3n-1669253340224)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps28.png)]](http://img.e-com-net.com/image/info8/2fb4d70c0a114f0d869eb19180117621.jpg) (3.6)
(3.6)
( 3.5 ) + ( 3.6 ) e ϵ 2 2 + w ϵ 1 2 \frac{(3.5)+(3.6)}{\frac{e\epsilon_2}{2}+\frac{w\epsilon_1}{2}} 2eϵ2+2wϵ1(3.5)+(3.6)得到最终差分方程
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-0Le8vXjH-1669253340225)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps30.png)]](http://img.e-com-net.com/image/info8/c1f5849275ee4639a22ad0573fe15737.jpg) (3.7)
(3.7)
其中的系数表示如下:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-MEvT7ByJ-1669253340225)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps31.png)]](http://img.e-com-net.com/image/info8/c232ed362b5c45c7b219d54f44523e72.jpg)
差分方程可以写成矩阵 [ A ] [ H ] = β 2 [ H ] [A][H]=\beta^2[H] [A][H]=β2[H]的形式,其具体表达式如下:

其中
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-padILuaA-1669253340226)(file:///C:\Users\skyer\AppData\Local\Temp\ksohtml10688\wps34.png)]](http://img.e-com-net.com/image/info8/c5fc6c8fd977429ea773ddf53ee58d67.jpg)
得到矩阵方程为:

求解A矩阵本征值和本征向量即为 β 2 \beta^2 β2和磁场值。
5、一维FDM算法求解模式的MATLAB函数如下
function [H,neff] = wgmodes1 (lambda, guess, nmodes, dx, eps)
% guess = n;
% eps = material_2d_space;
nx = size(eps,2);
nx = nx + 1;%nx、ny为所求磁场矩阵的大小,比介质矩阵大1
eps = [eps(1),eps,eps(nx-1)];
k = 2*pi/lambda; % free-space wavevector
if isscalar(dx)%确定输入是不是标量,若是向量表示网格不是均匀分割的
dx = dx*ones(1,nx+1); % uniform grid
else
dx = dx(:); % convert to column vector
dx = [dx(1);dx;dx(length(dx))]; % pad dx on top and bottom
end
e = ones(1,nx); e(:) = dx(2:nx+1);
w = ones(1,nx); w(:) = dx(1:nx);
eps1 = ones(1,nx); eps1(:) = eps(2:nx+1);
eps2 = ones(1,nx); eps2(:) = eps(1:nx);
v = e.*eps2+w.*eps1;
ae = (2*eps2)./(e.*v);
aw = (2*eps1)./(w.*v);
ap = ((e+w).*eps1.*eps2.*k^2)./v-(2*(e.*eps1+w.*eps2)/(e.*w.*v));
ip = (1:nx);
ie = (2:nx);
iw = (1:nx-1);
A = sparse ([ip,iw,ie],[ip,ie,iw],[ap(ip),ae(iw),aw(ie)]);
shift = (guess*k)^2;
options.tol = 1e-6;
options.disp = 0; % suppress output
[v,d] = eigs(A,speye(size(A)),nmodes,shift,options);
%S = speye(n) 返回一个主对角线元素为 1 且其他位置元素为 0 的 n×n 稀疏单位矩阵。
neff = lambda*sqrt(diag(d))/(2*pi);
H = zeros(nx,nmodes);
H=v;
%
%
% temp = zeros(1,nx);
% for kk = 1:nmodes
% temp(:) = v(:,kk);
% [mag,ii] = max(sqrt(sum(abs(temp).^2,2)));
% if abs(temp(ii,1)) > abs(temp(ii,2))
% jj = 1;
% else
% jj = 2;
% end
% mag = mag*temp(ii,jj)/abs(temp(ii,jj));
% temp = temp/mag;
% H(:,kk) = reshape(temp(:,1),nx,ny);
% end
return;
6、建立图形文件函数如下:
function [H,neff,x] = define_geometry1D(position)
dx = 0.005; %单位全是微米
lambda = 1.55; % vacuum wavelength
nmodes = 1; % number of modes to compute
n = 3.47;
%disp('defining the problem geometry');
rectangles = [];
for i = 1: size(position,1)
rectangles(i).min_x = position(i,1);
rectangles(i).max_x = position(i,2);
rectangles(i).material_type = position(i,3).^2;
end
%disp('calculating the number of cells in the problem space');
number_of_rectangles = size(rectangles,2);
% find the minimum and maximum coordinates of a
% box encapsulating the objects
number_of_objects = 0;
for i=1:number_of_rectangles
number_of_objects = number_of_objects + 1;
min_x(number_of_objects) = rectangles(i).min_x;
max_x(number_of_objects) = rectangles(i).max_x;
end
if number_of_objects == 0
fdtd_domain.min_x = 0;
fdtd_domain.max_x = 0;
else
fdtd_domain.min_x = min(min_x);
fdtd_domain.max_x = max(max_x);
end
% Determining the problem space size
fdtd_domain.size_x = fdtd_domain.max_x - fdtd_domain.min_x;
% number of cells in x, y, and z directions
nx = round(fdtd_domain.size_x/dx);
% adjust domain size by snapping to cells
fdtd_domain.size_x = nx * dx;
fdtd_domain.max_x = fdtd_domain.min_x + fdtd_domain.size_x;
material_2d_space = ones(1,nx);
x = (fdtd_domain.min_x:dx:fdtd_domain.max_x);
%disp('creating rectangles');
for ind = 1:number_of_rectangles
% convert rectangle end coordinates to node indices
blx = round((rectangles(ind).min_x - fdtd_domain.min_x)/dx) + 1;
bux = round((rectangles(ind).max_x - fdtd_domain.min_x)/dx)+1;
% assign material type of the rectangle to the cells
material_2d_space (blx:bux-1) ...
= rectangles(ind).material_type;
end
% plot(x(1:nx),material_2d_space);
[H,neff] = wgmodes1(lambda,n,nmodes,dx,material_2d_space);
fprintf(1,'neff = %.6f\n',neff);
figure();
plot(x,abs(H));
结果如下:
