06_塑性变形
文章目录
-
- 宏观规律
- 单晶体塑性变形
- 多晶体塑性变形
- 合金塑性变形
- 塑性变形引起的变化
宏观规律
-
工程应力应变曲线
- 概念
- 弹性变形:卸载后可恢复;塑性变形
- 应力: σ = P F 0 \sigma =\dfrac{P}{F_0} σ=F0P ;应变: ϵ = l − l 0 l 0 \epsilon =\dfrac{l-l_0}{l_0} ϵ=l0l−l0
- 应力应变曲线
- 概念

-
强度
- 弹性极限
- 屈服极限
- 条件屈服极限 σ 0.2 \sigma_{0.2} σ0.2
- 极限强度(抗拉强度)
-
塑性
- 延伸率 δ = l k − l 0 l 0 \delta =\dfrac{l_k-l_0}{l_0} δ=l0lk−l0
- 断面收缩率 Ψ = F ϕ − F k F ϕ \varPsi =\dfrac{F_\phi-F_k}{F_\phi} Ψ=FϕFϕ−Fk
-
胡克定律
σ = E ⋅ ϵ \sigma = E\cdot \epsilon σ=E⋅ϵ
E ( G ) E(G) E(G) 反映原子间结合力的大小- 弹性变形主要特点
- 线性、可逆性、变形量
- 影响弹性模量的因素
- 原子结构:与原子序数呈周期性变化
- 温度升高,弹模下降
- 合金元素
- 对晶体结构不敏感
- 少量合金元素不影响
- 大量合金元素,引起畸变,弹模下降
- 弹性变形主要特点
-
真应力–真应变曲线
-
真应变
d e = d l l e = ∫ d e = ∫ l 0 l d l l = ln l l 0 = ln ( 1 + δ ) de=\dfrac{dl}{l}\\ e = \int de=\int_{l_0}^l\dfrac{dl}{l}=\ln\dfrac{l}{l_0}=\ln(1+\delta) de=ldle=∫de=∫l0lldl=lnl0l=ln(1+δ) -
真应力
S = P F S = P F = P F 0 ⋅ F 0 F = P F 0 ⋅ l l 0 = σ ( ϵ + 1 ) S=\dfrac{P}{F}\\ S=\dfrac{P}{F}=\dfrac{P}{F_0}\cdot\dfrac{F_0}{F}=\dfrac{P}{F_0}\cdot\dfrac{l}{l_0}=\sigma (\epsilon +1) S=FPS=FP=F0P⋅FF0=F0P⋅l0l=σ(ϵ+1) -
流变曲线
真应力—真应变曲线中均匀塑变部分曲线
S = k e n S=ke^n S=ken
k k k 为常数, n n n 为形变硬化指数(表示抵抗继续塑变的能力)
-
-
工程应力—应变与真应力—真应变的关系
真应力—真应变为瞬时的计算
单晶体塑性变形
滑移变形
-
滑移现象
台阶:滑移线;很多台阶构成滑移带。
滑移 ⟹ \Longrightarrow ⟹ 台阶 ⟹ \Longrightarrow ⟹ 滑移线 ⟹ \Longrightarrow ⟹ 滑移带
滑移:发生在特定的晶面和晶向上
- 滑移面:可发生滑移的晶面
- 滑移方向:可发生滑移的晶向
- 滑移系:滑移面 + 滑移方向
-
滑移系
-
定义:一个滑移面及其上的一个滑移方向构成的一个空间位向关系
-
特点:
-
条件相同时,滑移面越多,材料塑性越好;条件相同时,滑移方向越多,材料塑性越好。
-
一般来说,滑移面时最密排面,滑移方向是最密排方向。
晶体结构 滑移面 滑移方向 面心立方 { 111 } \{111\} {111} < 110 > <110> <110> 体心立方 { 112 } \{112\} {112} { 110 } \bf \{110\} {110} { 123 } \{123\} {123} <111> 密排六方 { 0001 } \bf\{0001\} {0001} { 10 1 ˉ 0 } \{10\bar{1}0\} {101ˉ0} { 10 1 ˉ 1 } \{10\bar{1}1\} {101ˉ1} < 11 2 ˉ 0 > <11\bar{2}0> <112ˉ0>
-
-
-
临界分切应力

ϕ 1 \phi_1 ϕ1 为应力 σ \sigma σ 与滑移面法线方向的夹角
ϕ 2 \phi_2 ϕ2 为应力 σ \sigma σ 与滑移方向的夹角
P ′ = P ⋅ cos ϕ 2 A ′ = A / cos ϕ 1 P'=P\cdot\cos\phi_2\qquad A'=A/\cos\phi_1 P′=P⋅cosϕ2A′=A/cosϕ1
τ = P ′ A ′ = P cos ϕ 2 A / cos ϕ 1 = P A cos ϕ 1 cos ϕ 2 = σ cos ϕ 1 cos ϕ 2 \tau=\dfrac{P'}{A'}=\dfrac{P\cos\phi_2}{A/\cos\phi_1}=\dfrac{P}{A}\cos\phi_1\cos\phi_2=\sigma\cos\phi_1\cos\phi_2 τ=A′P′=A/cosϕ1Pcosϕ2=APcosϕ1cosϕ2=σcosϕ1cosϕ2
屈服应力 σ s \sigma_s σs τ c = σ s cos ϕ 1 cos ϕ 2 \tau_c=\sigma_s\cos\phi_1\cos\phi_2 τc=σscosϕ1cosϕ2 --------------临界分切应力
- 晶体滑移所需的最小分切应力
- τ c \tau_c τc 取决于晶体的本性,与外力无关
- τ c \tau_c τc 是组织敏感参数
m = cos ϕ 1 cos ϕ 2 m=\cos\phi_1\cos\phi_2 m=cosϕ1cosϕ2 称为取向因子(施密特因子)
当 $\phi + \lambda=90\ ^\circ $ 时, m = cos ϕ 1 cos ϕ 2 = cos ϕ 1 cos ( 90 ∘ − ϕ 1 ) = 1 2 sin ( 2 ϕ ) m=\cos\phi_1\cos\phi_2=\cos\phi_1\cos(90\ ^\circ - \phi_1)=\dfrac{1}{2}\sin(2\phi) m=cosϕ1cosϕ2=cosϕ1cos(90 ∘−ϕ1)=21sin(2ϕ)
所以,当 ϕ 1 = 45 ∘ \phi_1=45\ ^\circ ϕ1=45 ∘ 时, m = m m a x = 0.5 m=m_{max}=0.5 m=mmax=0.5 。此时 τ \tau τ 最大,有利于滑移
m 越大,晶体越容易开始滑移,所需外加载荷越小 --------软位向
m 越小,晶体越难开始滑移,所需外加载荷越大 ---------硬位向
-
滑移的微观机制
-
位错:刃位错、螺位错、混合位错
-
位错的滑移
-
位错运动阻力
-
点阵摩擦力(派–纳力)
τ P − N = 2 G 1 − v exp [ − 2 π d ( 1 − v ) b ] = 2 G 1 − v exp [ − 2 π W b ] \tau_{P-N}=\dfrac{2G}{1-v}\exp[-\dfrac{2\pi d}{(1-v)b}]=\dfrac{2G}{1-v}\exp [-\dfrac{2\pi W}{b}] τP−N=1−v2Gexp[−(1−v)b2πd]=1−v2Gexp[−b2πW]
d d d 为滑移面间距,$b $ 为滑移方向上的原子间距, v v v 为泊松比, W = d 1 − v W=\dfrac{d}{1-v} W=1−vd 代表位错的宽度-
τ P − N \tau_{P-N} τP−N 与 ( − W ) (-W) (−W) 成指数关系,故位错宽度 W W W 越大, τ P − N \tau_{P-N} τP−N 越小
-
τ P − N \tau_{P-N} τP−N 与 ( − d / b ) (-d/b) (−d/b) 成指数关系,故当晶面间距 $d $ 越大, 原子间距 b b b 越小时, τ P − N \tau_{P-N} τP−N 越小
故最密排面、最密排方向易成为滑移面和滑移方向
-
-
-
-
位错的交互作用
-
两位错平行 ----------- 同号相斥、异号相吸
-
两位错垂直 ----------- 位错交割(大小和方向等于对方柏氏矢量的割阶或扭折)
-
位错塞积(位错与面缺陷的作用)--------- 高度应力集中 --------- 交滑移或攀移 ----- 避开障碍物 ----- 继续滑移------- 应力松弛 ------ 波纹状滑移线
-
晶体滑移的连续性 ⟹ \Longrightarrow ⟹ 位错增殖
F-R 位错源
-
-
滑移时晶体的转动
-
拉伸
滑移面趋向平行于外力轴方向
滑移方向趋向平行于最大切应力方向
-
压缩
滑移面趋向于垂直外力轴方向
滑移方向趋向垂直于 最大切应力方向
-
-
单滑移和多滑移
滑移量或变形量小 ⟹ \Longrightarrow ⟹ 最有利的滑移系开动 ⟹ \Longrightarrow ⟹ 单滑移 ⟹ \Longrightarrow ⟹ 滑移线平行
变形量大 ⟹ \Longrightarrow ⟹ 晶体转动、外应力大 ⟹ \Longrightarrow ⟹ 多个滑移系同时或交替开动 ⟹ \Longrightarrow ⟹ 交滑移 ⟹ \Longrightarrow ⟹ 滑移线相互交叉
-
滑移变形特点
-
滑移不均匀,集中在某些晶面上
-
平移滑动,相对滑动的两部分晶体位向关系不变
-
临界分切应力较小
-
滑移线与应力轴呈一定角度
-
晶体表面出现滑移线和滑移带,滑移线先于滑移带出现
滑移是塑性变形的主要机制
-
孪生变形
-
孪生现象
- 晶体均匀切变
- 产生位向变化
- 变形与未变形部分呈镜面对称关系
-
孪生变形过程
产生了孪晶,每层原子都错动,需要的外力较大
-
孪生变形特点
- 部分晶体发生均匀切变
- 变形与未变形部分呈镜面对称关系,晶体位向发生变化
- 临界分切应力大
- 孪生对塑性变形贡献小于滑移
- 产生表面浮凸
塑性变形的次要机制,滑移变形难以实现时,就会发生孪生变形
多晶体塑性变形
-
多晶体塑性变形现象
单晶体:相当于一个单独的晶粒
多晶体:多个晶体
-
位向差影响位错运动
位向差 ⟹ \Longrightarrow ⟹ 晶粒间滑移系分切应力差 ⟹ \Longrightarrow ⟹ 晶粒变形难易程度不同 ⟹ \Longrightarrow ⟹ 变形不均匀 ⟹ \Longrightarrow ⟹ 晶粒间相互制约 ⟹ \Longrightarrow ⟹ 晶界附近有5个独立的滑移系 ⟹ \Longrightarrow ⟹ 变形协调
-
晶界影响位错运动
晶界 ⟹ \Longrightarrow ⟹ 阻碍位错运动 ⟹ \Longrightarrow ⟹ 晶体强度上升、位错塞积(应力集中)
-
位向差、晶界的综合作用
位向差、晶界对变形的影响是综合的,不可能截然分开
-
多晶体塑性变形特点
- 晶粒变形不均匀
- 晶粒变形先后不一(软位向、硬位向)
- 各晶粒的变形量有大有小
- 同一晶粒变形量不同(晶粒中心变形量小,晶界处的变形量大)
- 晶粒间变形协调
- 相互制约
- 晶粒变形不均匀
-
细晶强化
-
霍尔–佩奇公式
σ s = σ 0 + k d − 1 / 2 \sigma_s = \sigma_0+kd^{-1/2} σs=σ0+kd−1/2
σ s \sigma_s σs 为屈服强度; σ 0 \sigma_0 σ0 为单晶体屈服强度; k k k 为材料常数; d d d 为晶粒直径。 -
细晶强化机制
由于晶粒细小,晶界增多,位错阻力增大,使得强度升高;同时由于晶粒较多,降低了应力集中,因此需要更大的外力,这又提高塞积,启动相邻晶粒的滑移系变得困难,这也使得强度升高;另外晶粒较多使位错塞积分散,变形均匀,提高了塑性。
-
细晶强化特点
- 强度、塑性同时增高
- 强韧化潜力大
-
合金塑性变形
-
固溶体的塑性变形
-
合金:由两种或多种元素混合构成的物质
-
合金种类:
固溶体合金或化合物合金构成的单向合金;
固溶体A与固溶体B或固溶体(基体)与化合物(第二相)构成的两相合金
-
单相固溶体合金的塑性变形
-
现象
固溶体合金有多个晶粒
溶质原子
-
固溶强化
-
柯氏气团:位错与溶质原子间的交互作用
柯氏气团会阻碍位错运动,从而对晶体塑变起到强化作用
-
溶质原子与位错的应力场交互作用
置换型 ⟹ \Longrightarrow ⟹ 溶质大原子 ⟹ \Longrightarrow ⟹ 进入刃位错下半部(拉应力区) ⟹ \Longrightarrow ⟹ 点阵畸变减小
置换型 ⟹ \Longrightarrow ⟹ 溶质小原子 ⟹ \Longrightarrow ⟹ 进入刃位错上半部分(压应力区) ⟹ \Longrightarrow ⟹ 点阵畸变减小
间隙型 ⟹ \Longrightarrow ⟹ 溶质原子大于间隙 ⟹ \Longrightarrow ⟹ 进入刃位错下半部分(拉应力) ⟹ \Longrightarrow ⟹ 点阵畸变减小
从而减小体系能量,当位错脱离溶质原子时需要外能量,从而阻碍位错,强化晶体
-
-
固溶强化机理
溶质原子引起点阵畸变 ⟹ \Longrightarrow ⟹ 溶质原子进入位错 ⟹ \Longrightarrow ⟹ 对位错起钉扎作用 ⟹ \Longrightarrow ⟹ 柯氏气团 ⟹ \Longrightarrow ⟹ 本质上是弹性交互作用
溶质原子溶入基体 ⟹ \Longrightarrow ⟹ 层错能下降 ⟹ \Longrightarrow ⟹ 形成扩展位错 ⟹ \Longrightarrow ⟹ 难以交滑移 ⟹ \Longrightarrow ⟹ 位错塞积严重 ⟹ \Longrightarrow ⟹ 铃木气团 ⟹ \Longrightarrow ⟹ 化学交互作用
溶质溶剂价电子数差 ⟹ \Longrightarrow ⟹ 电偶极 ⟹ \Longrightarrow ⟹ 电交互作用
-
影响固溶强化的因素
- 溶质浓度升高,抗拉强度升高(浓度较低时明显)
- 原子尺寸差(溶质和溶剂)越大,产生应力场越强,强度越高
- 固溶体类型:间隙 > 置换
- 电子浓度:价电子数差越大,静电吸引力越强,强度越高
-
固溶强化特点
强度上升,塑性略有下降。
-
-
屈服与应变时效
-
现象
低碳钢拉伸 ----- 有明显屈服
卸载后立即重新加载 ------ 不再出现屈服现象
卸载后放置或经200℃加热再重新加载 ----- 出现屈服现象,且屈服点提高
这样的现象称为应变时效
-
机理
-
屈服机理
柯垂尔理论
位错被钉扎 ⟹ \Longrightarrow ⟹ 变形抗力高 ⟹ \Longrightarrow ⟹ 上屈服点 ⟹ \Longrightarrow ⟹ 外力加大 ⟹ \Longrightarrow ⟹ 脱钉 ⟹ \Longrightarrow ⟹ 应力下降 ⟹ \Longrightarrow ⟹ 下屈服点
位错增殖理论
变形初期位错数量少 ⟹ \Longrightarrow ⟹ 变形抗力高 ⟹ \Longrightarrow ⟹ 上屈服点 ⟹ \Longrightarrow ⟹ 变形量加大 ⟹ \Longrightarrow ⟹ 位错增殖 ⟹ \Longrightarrow ⟹ 变形抗力下降 ⟹ \Longrightarrow ⟹ 下屈服点
-
应变时效机理
柯垂尔理论
立即加载 ⟹ \Longrightarrow ⟹ 已经脱钉 ⟹ \Longrightarrow ⟹ 不再出现屈服
放置或加热后 ⟹ \Longrightarrow ⟹ 溶质原子扩散 ⟹ \Longrightarrow ⟹ 重新钉扎 ⟹ \Longrightarrow ⟹ 两次屈服
位错增殖理论
立即加载 ⟹ \Longrightarrow ⟹ 位错已经增殖 ⟹ \Longrightarrow ⟹ 不出现屈服
放置或加热 ⟹ \Longrightarrow ⟹ 位错畸变能减小 ⟹ \Longrightarrow ⟹ 回复 ⟹ \Longrightarrow ⟹ 位错减少
-
-
-
-
聚合型两相合金的塑性变形
影响多相合金塑性变形能力的因素:基体相性质、第二相性质、相界面匹配
第二相:性能、尺寸
第二相按尺寸可分为:聚合型(同一数量级)、弥散型(细小弥散)
聚合性分类:固溶体1+ 固溶体2(塑性相 + 塑性相);固溶体+化合物(第二相)(塑性相 + 硬脆相 )
-
塑性相 + 塑性相
σ ˉ = φ 1 σ 1 + φ 2 σ 2 \bar{\sigma}=\varphi_1 \sigma_1 + \varphi_2\sigma_2 σˉ=φ1σ1+φ2σ2
σ ˉ \bar{\sigma} σˉ 为流变应力; φ 1 、 φ 2 \varphi_1、\varphi_2 φ1、φ2 为相1、2的体积分数; σ 1 、 σ 2 \sigma_1、\sigma_2 σ1、σ2 为相1、2的流变应力。强度随较强相的体积分数变化
第二相不一定都有强化作用(如第二相较软)
-
塑性相 + 硬脆相
-
硬脆相连续网状分布(硬脆相沿晶分布)
位错运动距离增加 ⟹ \Longrightarrow ⟹ 运动阻力下降 ⟹ \Longrightarrow ⟹ 强化作用下降 ⟹ \Longrightarrow ⟹ 强度低
============== ⟹ \Longrightarrow ⟹ 塞积应力增加 ⟹ \Longrightarrow ⟹ 增大开裂几率 ⟹ \Longrightarrow ⟹ 塑性变形能力差
-
层片状
位错运动距离下降 ⟹ \Longrightarrow ⟹ 阻力增加 ⟹ \Longrightarrow ⟹ 强化作用好 ⟹ \Longrightarrow ⟹ 强度好
============== ⟹ \Longrightarrow ⟹ 塞积应力下降 ⟹ \Longrightarrow ⟹ 开裂几率下降(若底片较长,界面易开裂) ⟹ \Longrightarrow ⟹ 塑性较好
-
颗粒状
位错运动距离下降 ⟹ \Longrightarrow ⟹ 阻力小于层状 ⟹ \Longrightarrow ⟹ 强化作用小于层状 ⟹ \Longrightarrow ⟹ 强度较好
============== ⟹ \Longrightarrow ⟹ 塞积应力下降 ⟹ \Longrightarrow ⟹ 开裂几率下降,界面不易开裂 ⟹ \Longrightarrow ⟹ 塑性好
复相强化(第二相强化):取决于第二相性质、形状、分布、数量等因素
-
-
-
弥散型两相合金的塑性变形
-
不可变形粒子
- 过程

-
位错绕过机制
位错遇到第二相颗粒时,
弯曲变长 ⟹ \Longrightarrow ⟹ 能量升高 ⟹ \Longrightarrow ⟹ 位错运动阻力增加 ⟹ \Longrightarrow ⟹ 强度升高
留下的位错环 ⟹ \Longrightarrow ⟹ 阻碍后续位错的运动 ⟹ \Longrightarrow ⟹ 提高强度
-
可变形粒子
-
过程
-
位错切过机制
- 晶格结构不同 ⟹ \Longrightarrow ⟹ 错配能升高
- 反向畴 ⟹ \Longrightarrow ⟹ 反向畴界能升高
- 形成台阶 ⟹ \Longrightarrow ⟹ 新界面能
上述三方面使体系能量上升;
- 粒子周围弹性应力场 ⟹ \Longrightarrow ⟹ 阻碍位错运动
- 粒子与基体弹性模量差 ⟹ \Longrightarrow ⟹ 位错线能量变化,位错线张力变化
综上,都会对位错运动产生阻力 ⟹ \Longrightarrow ⟹ 提高晶体强度
-
-
强化机制
位错遇到第二相颗粒 ⟹ \Longrightarrow ⟹ 位错运动阻力上升 ⟹ \Longrightarrow ⟹ 强度升高
时效析出第二相颗粒 ------- 沉淀强化(时效强化)
粉末冶金出第二相颗粒----- 弥散强化
-
塑性变形引起的变化
-
塑性变形后的组织变化
-
纤维组织(沿变形方向拉长的晶粒)
-
位错胞(变形亚结构)
冷变形 ⟹ \Longrightarrow ⟹ 位错密度升高 ,但不均匀分布 ⟹ \Longrightarrow ⟹ 位错胞
胞壁为高密度位错,胞内位错密度低 。------- 变形亚结构(变形亚晶) 变形量大 ⟹ \Longrightarrow ⟹ 数量多,晶粒小
-
变形织构
变形 ⟹ \Longrightarrow ⟹ 晶面转动(晶格转动) ⟹ \Longrightarrow ⟹ 各晶粒位向趋于一致 ⟹ \Longrightarrow ⟹ 择优取向 ⟹ \Longrightarrow ⟹ 变形织构 ⟹ \Longrightarrow ⟹ 材料表现出宏观各向异性
丝织构:某一晶向平行于轧向
板织构:某一晶面平行于轧面,某一晶向平行于轧向
-
-
塑性变形后的能量变化
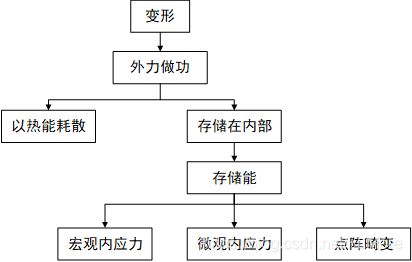
-
宏观内应力 工件各部分变形不均匀
-
微观内应力 晶粒间变形不均匀
-
点阵畸变 晶体缺陷
-
塑性变形后力学性能的变化
-
冷塑性变形使材料强度和硬度升高,而塑性和韧性下降(加工硬化)
-
加工硬化机理
- 单晶体硬化现象
-
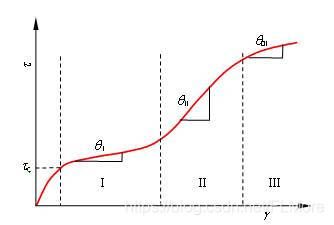
硬化机理
第一阶段:单滑移系 ⟹ \Longrightarrow ⟹ 受干扰少 ⟹ \Longrightarrow ⟹ 位错运动阻力小 ⟹ \Longrightarrow ⟹ 硬化速率下降
第二阶段:多滑移系 ⟹ \Longrightarrow ⟹ 位错交割缠结 ⟹ \Longrightarrow ⟹ 位错运动阻力大 ⟹ \Longrightarrow ⟹ 硬化速率增大
第三阶段:流变应力大 ⟹ \Longrightarrow ⟹ 交滑移或攀移绕过障碍、异号位错相互抵消 ⟹ \Longrightarrow ⟹ 硬化速率
-
多晶体硬化机理
-
晶界 ⟹ \Longrightarrow ⟹ 阻碍位错运动;2. 位向差 ⟹ \Longrightarrow ⟹ 晶粒间需要协调
1、2 使得硬化速率变大,同时使单滑移消失,即无第一阶段
-
-
-
塑性变形后物理、化学性能的变化
-
导电性
塑性变形后,
⟹ \Longrightarrow ⟹ 空位、位错增多 ⟹ \Longrightarrow ⟹ 点阵畸变 ⟹ \Longrightarrow ⟹ 对电子的散射 ⟹ \Longrightarrow ⟹ 电阻上升
⟹ \Longrightarrow ⟹ 显微组织择优取向 ⟹ \Longrightarrow ⟹ 电阻下降
-
磁性
塑性变形后,
⟹ \Longrightarrow ⟹ 降低 Z n 、 C u Zn、Cu Zn、Cu 的抗磁性
⟹ \Longrightarrow ⟹ 降低顺磁金属的磁化敏感性
-
导热性
塑性变形后,
⟹ \Longrightarrow ⟹ 裂纹、空洞、晶体缺陷 ⟹ \Longrightarrow ⟹ 导热性下降
-
密度
塑性变形后,
⟹ \Longrightarrow ⟹ 裂纹、空洞、晶体缺陷 ⟹ \Longrightarrow ⟹ 密度下降
-
电位
塑性变形后,
⟹ \Longrightarrow ⟹ 点阵畸变 ⟹ \Longrightarrow ⟹ 电位较高
-
化学稳定性
⟹ \Longrightarrow ⟹ 内应力、点阵畸变 ⟹ \Longrightarrow ⟹ 化学稳定性下降
-
耐蚀性
电位升高、稳定性下降、裂纹,空洞 ⟹ \Longrightarrow ⟹ 耐蚀性下降
-
⟹ \Longrightarrow ⟹ 显微组织择优取向 ⟹ \Longrightarrow ⟹ 电阻下降
-
磁性
塑性变形后,
⟹ \Longrightarrow ⟹ 降低 Z n 、 C u Zn、Cu Zn、Cu 的抗磁性
⟹ \Longrightarrow ⟹ 降低顺磁金属的磁化敏感性
-
导热性
塑性变形后,
⟹ \Longrightarrow ⟹ 裂纹、空洞、晶体缺陷 ⟹ \Longrightarrow ⟹ 导热性下降
-
密度
塑性变形后,
⟹ \Longrightarrow ⟹ 裂纹、空洞、晶体缺陷 ⟹ \Longrightarrow ⟹ 密度下降
-
电位
塑性变形后,
⟹ \Longrightarrow ⟹ 点阵畸变 ⟹ \Longrightarrow ⟹ 电位较高
-
化学稳定性
⟹ \Longrightarrow ⟹ 内应力、点阵畸变 ⟹ \Longrightarrow ⟹ 化学稳定性下降
-
耐蚀性
电位升高、稳定性下降、裂纹,空洞 ⟹ \Longrightarrow ⟹ 耐蚀性下降