LittleBear-原子源码驱动ov5640
摄像头
- 一、驱动模块
-
- 1、准备工具
- 2、设备树配置
- 3、源码拷贝
- 4、配置文件
- 5、编译生成驱动模块
- 二、板子应用程序
- 三、上机实验
一、驱动模块
由于原子的出厂源码提供全面的驱动源码,而教程源码只有部分字符设备驱动,本着学习的态度,一开始ipslcd屏幕和无线wifi都是在教程源码上开发的,本文将把源码中的ov5640驱动复制到教程源码中,整体不需做太多修改。
1、准备工具
- 开发板教程对应的linux源码
- 正点原子Linux出厂源码
2、设备树配置
/* iomxc复用 注意这里使用的引脚,其他设备就不能使用了,找到并注释掉*/
//pinctrl_csi1 pinctrl子系统
pinctrl_csi1: csi1grp {
fsl,pins = <
MX6UL_PAD_CSI_MCLK__CSI_MCLK 0x1b088
MX6UL_PAD_CSI_PIXCLK__CSI_PIXCLK 0x1b088
MX6UL_PAD_CSI_VSYNC__CSI_VSYNC 0x1b088
MX6UL_PAD_CSI_HSYNC__CSI_HSYNC 0x1b088
MX6UL_PAD_CSI_DATA00__CSI_DATA02 0x1b088
MX6UL_PAD_CSI_DATA01__CSI_DATA03 0x1b088
MX6UL_PAD_CSI_DATA02__CSI_DATA04 0x1b088
MX6UL_PAD_CSI_DATA03__CSI_DATA05 0x1b088
MX6UL_PAD_CSI_DATA04__CSI_DATA06 0x1b088
MX6UL_PAD_CSI_DATA05__CSI_DATA07 0x1b088
MX6UL_PAD_CSI_DATA06__CSI_DATA08 0x1b088
MX6UL_PAD_CSI_DATA07__CSI_DATA09 0x1b088
>;
};
//csi_pwn_rst pinctrl子系统
csi_pwn_rst: csi_pwn_rstgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0x10b0
MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0x10b0
>;
};
/* ov5640设备树 */
ov5640: ov5640@3c {
compatible = "ovti,ov5640";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_csi1
&csi_pwn_rst>;
clocks = <&clks IMX6UL_CLK_CSI>;
clock-names = "csi_mclk";
pwn-gpios = <&gpio1 4 1>;
rst-gpios = <&gpio1 2 0>;
csi_id = <0>;
mclk = <24000000>;
mclk_source = <0>;
status = "okay";
port {
ov5640_ep: endpoint {
remote-endpoint = <&csi1_ep>;
};
};
};
3、源码拷贝
出厂源码路径:linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek/drivers/media/platform/mxc,复制当前文件夹到自己开发版本的对应路径下。
4、配置文件
配置文件路径:linux-imx-4.1.15-2.1.0-gc353ffb-v2.0/arch/arm/configs/imx_alientek_emmc_defconfig,linux内核编译是依赖于根目录下的.config文件,其实两个配置文件都是一个意思使用make xxx_defconfig或图形界面保存可转变为本目录形式。
配置路径:
Location: │
│ -> Device Drivers │
│ -> Multimedia support (MEDIA_SUPPORT [=y]) │
│ -> V4L platform devices (V4L_PLATFORM_DRIVERS [=y])
具体配置不用改,出厂源码配置已经设置好了。
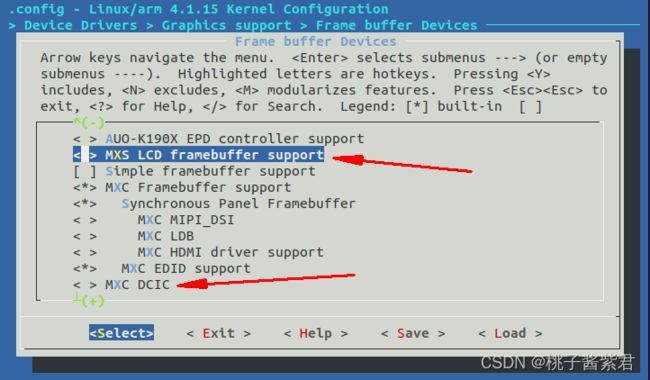
这里遇到的问题,虽然摄像头可以驱动了,但出厂配置文件太全面,在屏幕开发阶段,想使用ipslcd而关闭原配4.3寸LCD,在关掉原配LCD的配置时:
- 配置路径
Location: │
│ -> Device Drivers │
│ -> Graphics support │
│ -> Frame buffer Devices
- 具体设置:尤其注意箭头位置
5、编译生成驱动模块
在mxc/subdev下找到两个驱动模块,放到板子/lib/modules/4.1.15xxx/路径下(其他路径也可)。
- ov5640_camera:用于摄像头的驱动。
- mx6s_capture:用于板子捕获相关驱动。
二、板子应用程序
秉承“先吃苦后享乐”的原则,驱动配置好了,接下来就是上层应用程序的调试,只需操作ov5640提供的video1设备接口和ipslcd提供的fb0设备接口,复制原子应用开发教程中的源码。
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2021. All rights reserved.
文件名 : v4l2_camera.c
作者 : 邓涛
版本 : V1.0
描述 : V4L2摄像头应用编程实战
其他 : 无
论坛 : www.openedv.com
日志 : 初版 V1.0 2021/7/09 邓涛创建
***************************************************************/
#include \n" , argv[0]);
exit(EXIT_FAILURE);
}
/* 初始化LCD */
if (fb_dev_init())
exit(EXIT_FAILURE);
/* 初始化摄像头 */
if (v4l2_dev_init(argv[1]))
exit(EXIT_FAILURE);
/* 枚举所有格式并打印摄像头支持的分辨率及帧率 */
v4l2_enum_formats();
v4l2_print_formats();
/* 设置格式 */
if (v4l2_set_format())
exit(EXIT_FAILURE);
/* 初始化帧缓冲:申请、内存映射、入队 */
if (v4l2_init_buffer())
exit(EXIT_FAILURE);
/* 开启视频采集 */
if (v4l2_stream_on())
exit(EXIT_FAILURE);
/* 读取数据:出队 */
v4l2_read_data(); //在函数内循环采集数据、将其显示到LCD屏
exit(EXIT_SUCCESS);
}
编译生成App文件放到板子里。
三、上机实验
- 驱动模块.ko就绪
- 应用程序app就绪
程序运行效果如下图,littlebear_pro的摄像头部分调试结束:
