强化学习之图解SAC算法
强化学习之图解SAC算法
- 1. 网络结构
- 2. 产生experience的过程
- 3. Q Critic网络的更新流程
- 4. V Critic网络的更新流程
- 5. Actor网络的更新流程
柔性动作-评价(Soft Actor-Critic,SAC)算法的网络结构有5个。SAC算法解决的问题是离散动作空间和连续动作空间的强化学习问题,是off-policy的强化学习算法(关于on-policy和off-policy的讨论可见:强化学习之图解PPO算法和TD3算法)。
SAC的论文有两篇,一篇是《Soft Actor-Critic Algorithms and Applications》,2019年1月发表,其中SAC算法流程如下所示,它包括1个actor网络,4个Q Critic网络:
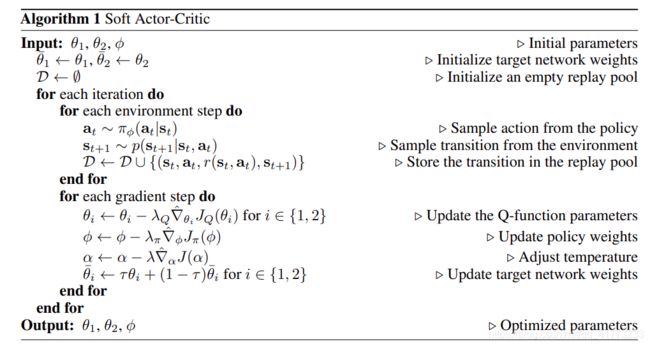
一篇是《Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor》,2018年8月发表,其中SAC算法流程如下所示,它包括1个actor网络,2个V Critic网络(1个V Critic网络,1个Target V Critic网络),2个Q Critic网络:

本文介绍的算法思路是1个actor网络,2个V Critic网络(1个V Critic网络,1个Target V Critic网络),2个Q Critic网络。而另一种SAC算法思路可以参考openAI的spinning up教程:openAI spinning up
1. 网络结构
关于SAC算法的网络结构图解,笔者认为此链接的讲解也非常地好:Soft Actor-Critic,本文和此链接的说法一致。

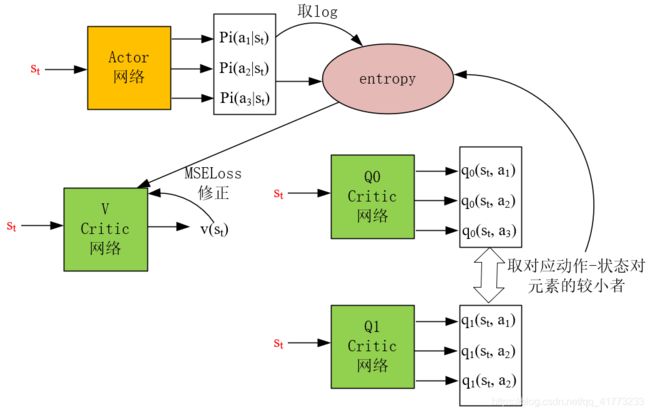
一个actor网络,四个critic网络,分别是状态价值估计 v v v和Target v v v网络;动作-状态价值估计 Q 0 Q_0 Q0和 Q 1 Q_1 Q1网络。
actor网络的输入为状态,输出为动作概率 π ( a t ∣ s t ) \pi(a_t|s_t) π(at∣st)(对于离散动作空间而言)或者动作概率分布参数(对于连续动作空间而言)
critic网络的输入为状态,输出为状态的价值。其中 V Critic 网络的输出为 v ( s ) v(s) v(s),代表状态价值的估计;Q Critic 网络的输出为 q ( s , a ) q(s,a) q(s,a),代表动作-状态对价值(以下简称为动作价值)的估计;
因为在SAC算法中为了鼓励探索,增加了熵的概念,所以它actor和critic网络的训练目标和常规不含熵的算法(如TD3,PPO)的训练目标不一样。
在SAC算法中,如果actor网络输出的动作越能够使一个综合指标(既包含动作价值 q q q,又包含熵 h h h)变大,那么就越好。
如果Q critic网络输出的动作价值 q q q越准确(根据贝尔曼方程可知, q q q是否准确依赖于 v v v是否准确),那么就越好。
如果V critic网络输出的状态价值 v v v越准确,那么就越好。但需要注意的是,因为SAC中加了熵的概念,所以状态价值 v v v并不是我们通常理解的 v ( s ) v(s) v(s),它其中还加了熵这一项。
接下来只说SAC的算法流程,而不对其中的公式做过多的解释,具体SAC算法的推导过程可以参考《最前沿:深度解读Soft Actor-Critic 算法》。
2. 产生experience的过程
已知一个状态 s t s_t st,通过 actor网络 得到所有动作的概率 π ( a ∣ s t ) \pi(a|s_t) π(a∣st)(图中以三个动作: a 1 , a 2 , a 3 a_1,a_2,a_3 a1,a2,a3为例),然后依概率采样得到动作 a t = a 2 a_t=a_2 at=a2,然后将 a 2 a_2 a2输入到环境中,得到 s t + 1 s_{t+1} st+1和 r t + 1 r_{t+1} rt+1,这样就得到一个experience: ( s t , a 2 , s t + 1 , r t + 1 ) (s_t, a_2, s_{t+1}, r_{t+1}) (st,a2,st+1,rt+1),然后将experience放入经验池中。
以上是离散动作的情况,如果是连续动作,就输出概率分布的参数(比如高斯分布的均值和方差),然后按照概率分布去采样得到动作 a t a_t at.
经验池 存在的意义是为了消除experience的相关性,因为强化学习中前后动作通常是强相关的,而将它们打散,放入经验池中,然后在训练神经网络时,随机地从经验池中选出一批experience,这样能够使神经网络训练地更好。

3. Q Critic网络的更新流程

拿从经验池buffer中采出的数据 ( s t , a t , s t + 1 , r t + 1 ) (s_t, a_t, s_{t+1}, r_{t+1}) (st,at,st+1,rt+1)进行Critic网络的更新,以 ( s t , a 2 , s t + 1 , r t + 1 ) (s_t, a_2, s_{t+1}, r_{t+1}) (st,a2,st+1,rt+1)为例。
基于最优贝尔曼方程,用 U t ( q ) = r t + γ v ( s t + 1 ) U_{t}^{\left( q \right)}=r_t+\gamma v(s_{t+1}) Ut(q)=rt+γv(st+1)作为状态 s t s_t st的真实价值估计,而用实际采用的动作 a 2 a_2 a2的 q i ( s t , a 2 ) q_i(s_t,a_2) qi(st,a2)值 ( 其 中 , i = 0 , 1 ) (其中,i=0,1) (其中,i=0,1)作为状态 s t s_t st的预测价值估计,最后用MSEloss作为Loss函数,对神经网络 Q 0 Q_0 Q0, Q 1 Q_1 Q1进行训练。
注意取MSELoss就意味着对从经验池buffer中取一个batch的数据进行了求平均的操作,即:
L o s s = 1 ∣ B ∣ ∑ ( s t , a t , r t + 1 , s t + 1 ) ∈ B [ q i ( s t , a t ; w ( i ) ) − U t ( q ) ] 2 Loss=\frac{1}{|\mathcal{B}|}\sum_{\left( s_t,a_t,r_{t+1},s_{t+1} \right) \in \mathcal{B}}{\left[ q_i\left( s_t,a_t;w^{\left( i \right)} \right) -U_{t}^{\left( q \right)} \right] ^2} Loss=∣B∣1(st,at,rt+1,st+1)∈B∑[qi(st,at;w(i))−Ut(q)]2
pytorch代码如下:
# train Q critic
next_v_tensor = self.v_target_net(next_state_tensor)
q_target_tensor = reward_tensor.unsqueeze(1) + self.gamma * (1. - done_tensor.unsqueeze(1)) * next_v_tensor
all_q0_pred_tensor = self.q0_net(state_tensor)
q0_pred_tensor = torch.gather(all_q0_pred_tensor, 1, action_tensor.unsqueeze(1))
q0_loss_tensor = self.q0_loss(q0_pred_tensor, q_target_tensor.detach())
self.q0_optimizer.zero_grad()
q0_loss_tensor.backward()
self.q0_optimizer.step()
all_q1_pred_tensor = self.q1_net(state_tensor)
q1_pred_tensor = torch.gather(all_q1_pred_tensor, 1, action_tensor.unsqueeze(1))
q1_loss_tensor = self.q1_loss(q1_pred_tensor, q_target_tensor.detach())
self.q1_optimizer.zero_grad()
q1_loss_tensor.backward()
self.q1_optimizer.step()
4. V Critic网络的更新流程
拿从经验池buffer中采出的数据 ( s t , a t , s t + 1 , r t + 1 ) (s_t, a_t, s_{t+1}, r_{t+1}) (st,at,st+1,rt+1)进行V Critic网络的更新,接着 ( s t , a 2 , s t + 1 , r t + 1 ) (s_t, a_2, s_{t+1}, r_{t+1}) (st,a2,st+1,rt+1)的例子。
用含熵的式子进行状态价值估计,即下式作为V critic网络输出的真实值:
U t ( v ) = E a t ′ ∼ π ( ⋅ ∣ s t ; θ ) [ min i = 0 , 1 q i ( s t , a t ′ ; w ( i ) ) − α ln π ( a t ′ ∣ s t ; θ ) ] = ∑ a t ′ ∈ A ( s t ) π ( a t ′ ∣ s t ; θ ) [ min i = 0 , 1 q i ( s t , a t ′ ; w ( i ) ) − α ln π ( a t ′ ∣ s t ; θ ) ] U_{t}^{\left( v \right)}=E_{a_{t}^{'}\sim \pi \left( \cdot |s_t;\theta \right)}\left[ \underset{i=0,1}{\min}q_i\left( s_t,a_{t}^{'};w^{\left( i \right)} \right) -\alpha \ln \pi \left( a_{t}^{'}|s_t;\theta \right) \right] \\ =\sum_{a_{t}^{'}\in \mathbb{A}\left( s_t \right)}{\pi \left( a_{t}^{'}|s_t;\theta \right) \left[ \underset{i=0,1}{\min}q_i\left( s_t,a_{t}^{'};w^{\left( i \right)} \right) -\alpha \ln \pi \left( a_{t}^{'}|s_t;\theta \right) \right]} Ut(v)=Eat′∼π(⋅∣st;θ)[i=0,1minqi(st,at′;w(i))−αlnπ(at′∣st;θ)]=at′∈A(st)∑π(at′∣st;θ)[i=0,1minqi(st,at′;w(i))−αlnπ(at′∣st;θ)]
可以看到 π ( a t ′ ∣ s t ; θ ) \pi \left( a_{t}^{'}|s_t;\theta \right) π(at′∣st;θ)、 min i = 0 , 1 q i ( s t , a t ′ ; w ( i ) ) \underset{i=0,1}{\min}q_i\left( s_t,a_{t}^{'};w^{\left( i \right)} \right) i=0,1minqi(st,at′;w(i))、 ln π ( a t ′ ∣ s t ; θ ) \ln \pi \left( a_{t}^{'}|s_t;\theta \right) lnπ(at′∣st;θ)这三项和图中的Loss三个输入箭头完全一致。
用V critic网络的输出作为预测值,最后用MSEloss作为Loss函数,对神经网络 V V V进行训练。
注意取MSELoss就意味着对从经验池buffer中取一个batch的数据进行了求平均的操作,即:
L o s s = 1 ∣ B ∣ ∑ ( s t , a t , r t + 1 , s t + 1 ) ∈ B [ v ( s t ; w ( v ) ) − U t ( v ) ] 2 Loss=\frac{1}{|\mathcal{B}|}\sum_{\left( s_t,a_t,r_{t+1},s_{t+1} \right) \in \mathcal{B}}{\left[ v\left( s_t;w^{\left( v \right)} \right) -U_{t}^{\left( v \right)} \right] ^2} Loss=∣B∣1(st,at,rt+1,st+1)∈B∑[v(st;w(v))−Ut(v)]2
pytorch代码如下:
# train V critic
q0_tensor = self.q0_net(state_tensor)
q1_tensor = self.q1_net(state_tensor)
q01_tensor = torch.min(q0_tensor, q1_tensor)
prob_tensor = self.actor_net(state_tensor)
ln_prob_tensor = torch.log(prob_tensor.clamp(1e-6, 1.))
entropic_q01_tensor = prob_tensor * (q01_tensor -
self.alpha * ln_prob_tensor)
# OR entropic_q01_tensor = prob_tensor * (q01_tensor - \
# self.alpha * torch.xlogy(prob_tensor, prob_tensor)
v_target_tensor = torch.sum(entropic_q01_tensor, dim=-1, keepdim=True)
v_pred_tensor = self.v_evaluate_net(state_tensor)
v_loss_tensor = self.v_loss(v_pred_tensor, v_target_tensor.detach())
self.v_optimizer.zero_grad()
v_loss_tensor.backward()
self.v_optimizer.step()
self.update_net(self.v_target_net, self.v_evaluate_net)
5. Actor网络的更新流程

对actor网络训练的loss稍微有些复杂,其表达式为:
L o s s = − 1 ∣ B ∣ ∑ ( s t , a t , r t + 1 , s t + 1 ) ∈ B E a t ′ ∼ π ( ⋅ ∣ s t ; θ ) [ q 0 ( s t , a t ′ ) − α ln π ( a t ′ ∣ s t ; θ ) ] Loss=-\frac{1}{|\mathcal{B}|}\sum_{\left( s_t,a_t,r_{t+1},s_{t+1} \right) \in \mathcal{B}}{E_{a_{t}^{'}\sim \pi \left( \cdot |s_t;\theta \right)}}\left[ q_0\left( s_t,a_{t}^{'} \right) -\alpha \ln \pi \left( a_{t}^{'}|s_t;\theta \right) \right] Loss=−∣B∣1(st,at,rt+1,st+1)∈B∑Eat′∼π(⋅∣st;θ)[q0(st,at′)−αlnπ(at′∣st;θ)]
E a t ′ ∼ π ( ⋅ ∣ s t ; θ ) [ . . . . ] E_{a_{t}^{'}\sim \pi \left( \cdot |s_t;\theta \right)}[....] Eat′∼π(⋅∣st;θ)[....]代表需要对中括号里面的项取期望,注意: a t ′ a_{t}^{'} at′并不是在buffer中取出的数据 ( s t , a t , r t + 1 , s t + 1 ) \left( s_t,a_t,r_{t+1},s_{t+1} \right) (st,at,rt+1,st+1)中的 a t a_t at,而是重新用actor网络 π \pi π预测的所有可能的动作,因此对于离散动作空间,常有以下的等价计算方法:
E a t ′ ∼ π ( ⋅ ∣ s t ; θ ) [ q 0 ( s t , a t ′ ; w ( 0 ) ) − α ln π ( a t ′ ∣ s t ; θ ) ] = ∑ a t ′ ∈ A ( s t ) π ( a t ′ ∣ s t ; θ ) [ q 0 ( s t , a t ′ ; w ( 0 ) ) − α ln π ( a t ′ ∣ s t ; θ ) ] E_{a_{t}^{'}\sim \pi \left( \cdot |s_t;\theta \right)}\left[ q_0\left( s_t,a_{t}^{'};w^{\left( 0 \right)} \right) -\alpha \ln \pi \left( a_{t}^{'}|s_t;\theta \right) \right] \\ =\sum_{a_{t}^{'}\in \mathbb{A}\left( s_t \right)}{\pi \left( a_{t}^{'}|s_t;\theta \right) \left[ q_0\left( s_t,a_{t}^{'};w^{\left( 0 \right)} \right) -\alpha \ln \pi \left( a_{t}^{'}|s_t;\theta \right) \right]} Eat′∼π(⋅∣st;θ)[q0(st,at′;w(0))−αlnπ(at′∣st;θ)]=at′∈A(st)∑π(at′∣st;θ)[q0(st,at′;w(0))−αlnπ(at′∣st;θ)]
可以看到 π ( a t ′ ∣ s t ; θ ) \pi \left( a_{t}^{'}|s_t;\theta \right) π(at′∣st;θ)、 q 0 ( s t , a t ′ ; w ( 0 ) ) q_0\left( s_t,a_{t}^{'};w^{\left( 0 \right)} \right) q0(st,at′;w(0))、 ln π ( a t ′ ∣ s t ; θ ) \ln \pi \left( a_{t}^{'}|s_t;\theta \right) lnπ(at′∣st;θ)这三项和图中的Loss三个输入箭头完全一致。需要注意的是 q 0 ( s t , a t ′ ; w ( 0 ) ) q_0\left( s_t,a_{t}^{'};w^{\left( 0 \right)} \right) q0(st,at′;w(0))可以用 q 1 ( s t , a t ′ ; w ( 1 ) ) q_1\left( s_t,a_{t}^{'};w^{\left( 1 \right)} \right) q1(st,at′;w(1))替换,这两个Q critic网络在功能上是等价的。
B \mathcal{B} B代表经验池buffer,即求Loss的时候还需要对经验池中取出的样本取平均。这样能够体现取出的样本平均意义下的好坏。
其中: α \alpha α是熵的奖励系数,它决定熵 ln π ( a t + 1 ∣ s t ; θ ) \ln \pi \left( a_{t+1}|s_t;\theta \right) lnπ(at+1∣st;θ)的重要性,越大越重要。
pytorch代码如下:
# train actor
prob_q_tensor = prob_tensor * (self.alpha * ln_prob_tensor - q0_tensor)
actor_loss_tensor = prob_q_tensor.sum(axis=-1).mean()
self.actor_optimizer.zero_grad()
actor_loss_tensor.backward()
self.actor_optimizer.step()
如果觉得文章有帮助,可以关注我、并且给文章点赞并收藏,欢迎大家关注我的知乎同名账号:ReEchooo。主页链接