STM32定时器输入捕获
STM32定时器输入捕获
用STM32F429做定时器捕获PWM波形,测出波形的周期、频率以及占空比、正向脉宽。
基本原理
定时器的输入捕获主要是为了测量输入信号的频率,脉宽,占空比等信息。
需要理解stm32定时器的基本结构
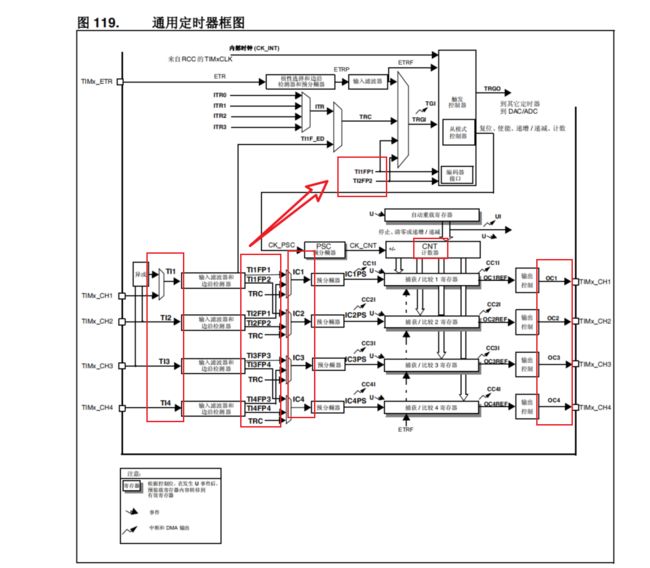
主要理解这些框起来的是重点,都是本人自己的理解,才疏学浅,万一有理解错的还望指正。
至于上半部分的时钟没有太难理解的。下面的通道理解上才比较复杂。
首先一个通用定时器有4个输入通道4个通道,这些通道可以空着也可以复用到对应的GPIO上去,
/*
可以输出到GPIO的TIM通道:
TIM1_CH1, PA8, PE9,
TIM1_CH2, PA9, PE11
TIM1_CH3, PA10, PE13
TIM1_CH4, PA11, PE14
TIM2_CH1, PA15 (仅限429,439) 407没有此脚
TIM2_CH2, PA1, PB3
TIM2_CH3, PA2, PB10
TIM2_CH4, PA3, PB11
TIM3_CH1, PA6, PB4, PC6
TIM3_CH2, PA7, PB5, PC7
TIM3_CH3, PB0, PC8
TIM3_CH4, PB1, PC9
TIM4_CH1, PB6, PD12
TIM4_CH2, PB7, PD13
TIM4_CH3, PB8, PD14
TIM4_CH4, PB9, PD15
TIM5_CH1, PA0, PH10
TIM5_CH2, PA1, PH11
TIM5_CH3, PA2, PH12
TIM5_CH4, PA3, PI10
TIM8_CH1, PC6, PI5
TIM8_CH2, PC7, PI6
TIM8_CH3, PC8, PI7
TIM8_CH4, PC9, PI2
TIM9_CH1, PA2, PE5
TIM9_CH2, PA3, PE6
TIM10_CH1, PB8, PF6
TIM11_CH1, PB9, PF7
TIM12_CH1, PB14, PH6
TIM12_CH2, PB15, PH9
TIM13_CH1, PA6, PF8
TIM14_CH1, PA7, PF9
但是一个通道只能配置成一种模式,比如配置成输出模式,就不能配置成输入模式,虽然一个通道有好几个GPIO可以设置,但是设置完一个其他就不能在设置在这个通道了。
因为要捕获输入的信号,所以设置为输入模式,关键看上图左侧的通道关系
TI1到TI4表示4个输入通道,但是输入通道并不是和定时器的通道直接连起来的,经过了输入滤波器和边沿检测器之后,一个输入通道就分成了两个,可以分别送到两个定时器通道去,比如TI1FP1,TI1FP2,这都是第一个输入通道分出来的,可以分别送给IC1和IC2,IC的意思就是输入通道,这样在后边定时器的捕获通道就可以一个捕获上升沿,一个捕获下降沿,这样就可以把一路PWM的频率和占空比都测出来了。
再接下来还有重要的问题是每个定时器的时钟速度。
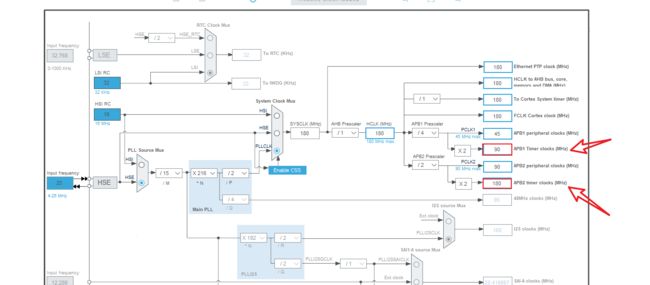
可以在时钟树上看到APB1和APB2上的定时器的时钟速度是不一样的。
APB1 定时器有 TIM2, TIM3 ,TIM4, TIM5, TIM6, TIM7, TIM12, TIM13, TIM14
APB2 定时器有 TIM1, TIM8 ,TIM9, TIM10, TIM11
APB1 定时器的输入时钟 TIMxCLK = SystemCoreClock / 2; 90M
APB2 定时器的输入时钟 TIMxCLK = SystemCoreClock; 180M
因此在配置定时器的分频系数,和最后计算信号频率时要注意使用到的定时器的频率。
输入捕获计算信号的频率和占空比的原理是:
假设计数器的计数方向是向上,定时器会按照分频之后的速度,一直向上累加,当遇到设置好的边沿时,就会把当前计数的值存下来,通过读取这个值就可以知道在什么时刻检测到了边沿,通过不同边沿时刻的差值,就可以计算出频率等信息。
代码
使用Cubemx生成代码
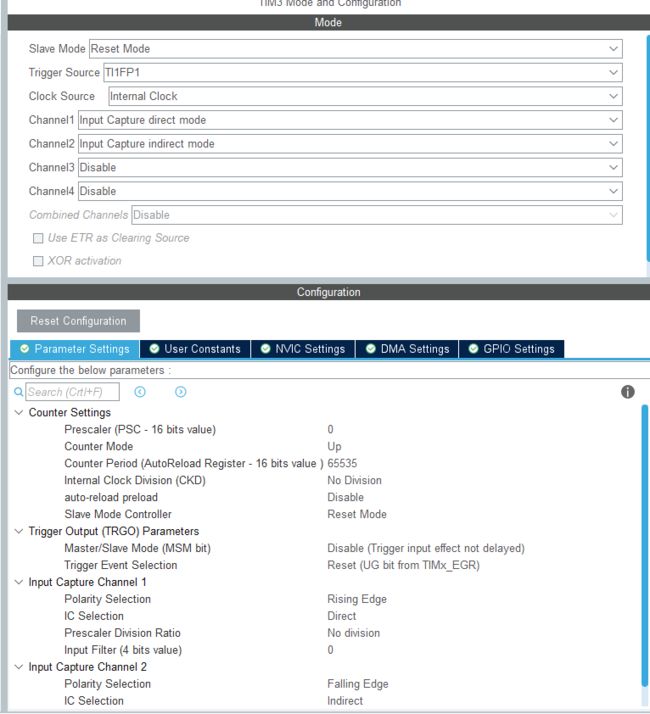
这个定时器配置来检测PWM信号。
前两个选项slave mode用来配置TI1FP1触发,而且触发之后的结果是reset,为什么要这么设置,关键是后边代码实现的原理,这么设置的意思是,当TI1FP1触发之后,整个计数器重置,从0开始数,如果前边不设置这么滤波器、分频器的话,TI1FP1就是第一路的输入信号,比如设置为搞电平触发之后,一旦来了高电平,之前全部复位开始计时,这就好比是PWM信号的高电平来了,全部重置,然后第1个定时器通道开始计时,直到遇到下一个上升沿的时候才会记录下数值,而第二路定时器通道也同时开始计时,直到遇到下降沿才记录数值。不难发现,第一路记录的数值就是整个周期的数值,而第二个通道记录的数值是上升沿到下降沿之间的数值,就是PWM正向脉宽的数值,这样就得出了想要的结果,所以要设置成这种模式。
下面两个选项是定时器的两个通道的选择,回到结构框图去看,通道一的输入可以有两个选择,TI1FP1和TI2FP1,那选择第一个就是直连,选择第二个就是非直连,第二路的选择也是同样的道理。硬件配置为通道1的GPIO,所以直接选择通道1直连,通道2非直连。
接下来的配置都比较明白,在下方的参数选择中,一个上升沿触发,一个下降沿触发。
下面主要涉及到3个函数:
TIM_HandleTypeDef htim3;
__IO uint16_t IC2Value = 0;
__IO uint16_t IC1Value = 0;
__IO float DutyCycle = 0;
__IO float Frequency = 0;
void bsp_SetPWMCapture()
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/*
上面是3个句柄结构体
*/
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 90-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
/*
上面主要设置了一些分频系数
*/
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
/*
上面设置的是从模式,比如设置为复位模式,TI1FP1上升沿触发
*/
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
/*
上面这里对于输入捕获来说没有用到
*/
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
/*
上面是通道1的配置参数
*/
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
/*
上面是通道2的配置参数
*/
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
/* USER CODE BEGIN TIM3_Init 2 */
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_2);
/*
上面是使能两个通道的输入捕获中断,cubemx是不会自动生成这两句的,需要自己手动添加
*/
/* USER CODE END TIM3_Init 2 */
}
/*
HAL_TIM_Base_MspInit是HAL库的一个弱定义函数,在这里定义之后就会按照这个定义为准
HAL_TIM_Base_Init会调用这个函数,用来初始化GPIO和中断的参数。
*/
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM1)
{
}
else if(tim_baseHandle->Instance==TIM2)
{
}
else if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
/**TIM3 GPIO Configuration
PC6 ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
}
/*
//__HAL_TIM_SET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__, __POLARITY__)可以设置指定定时器和通道的输入触发沿
接下来就是中断服务函数,如果产生了输入捕获中断就会在HAL库的中断服务函数中调用这个回调函数,可以在下面实现自己的代码
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(TIM3 == htim->Instance)
{
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
/* 获取输入捕获值 */
IC1Value = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_1);
IC2Value = HAL_TIM_ReadCapturedValue(&htim3,TIM_CHANNEL_2);
if (IC1Value != 0)
{
/* 占空比计算 */
DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1);
/* 频率计算 */
Frequency = 90000000/90/(float)(IC1Value+1);
}
else
{
DutyCycle = 0;
Frequency = 0;
}
}
}
}
另外还需要定义一个大的中断服务函数。
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);//在这个函数中会回调上面自定义的服务函数
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
至此配置完成,在主函数中做好初始化,在生成PWM波之后,把输出引脚和输入引脚相连,即可得到波形的数据。
首先设置了一个2k频率,占空比30的PWM波,以下为实验结果:
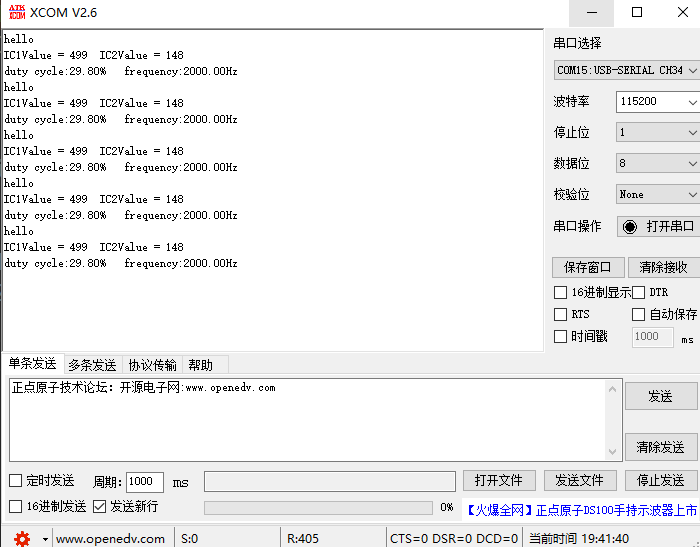
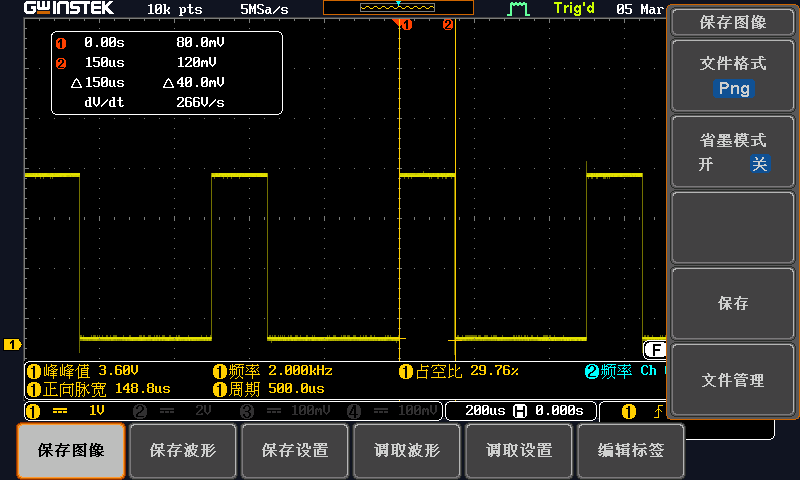
和示波器测得的数据完全一致。
本文如有错误或者不足,恳请指正。