ORAN延迟管理和时间窗计算
1)参考点
物理层内部的低层前传划分具有两个特点,严格的带宽要求和紧凑的时延要求。这意味着使用由传输网络支持的特殊“前传服务配置”,根据运营环境、拓扑和目标用例的不同,该配置可能有所不同。
一般概念和时延模型是基于eCPRI参考点,这些参考点用于延迟管理定义,如下图所示。本文也为DL和UL时延提供了更多细节,并解释了延迟参数以及如何确定这些参数;注,一般来说,对于连接到O-DU上的每个O-RU,期望使用一组单独的定时参数。这是因为O-RU之间可能存在差异,需要根据O-RU的部署方案,以及O-RU的性能来确定。
本文也定义了可用于提供互操作定时解决方案的多种方法。

如图所示,定义了以下几个eCPRI参考点:
- R1:O-DU的发射接口(下行)
- R2:O-RU的接收接口(下行)
- R3:O-RU的发射接口(上行)
- R4:O-DU的接收接口(上行)
- Ra:O-RU的天线接口
注:当外部天线与可忽略延迟的电缆一起使用时,则O-RU连线的位置(电缆接口)可假定为Ra。
对于从R1到R2的传输,不仅包括下行的C平面和U平面消息,也包括上行的C平面消息。未考虑M平面消息。
- T12:从O-DU发射接口(R1)到O-RU接收接口(R2)的下行传输延迟
- T2a:从O-RU接收接口(R2)到天线接口(Ra)的延迟,也就是O-RU下行模块的内部处理时间
- T1a:=T12+T2a,从O-DU发射接口(R1)到天线接口(Ra)的下行传输延迟,包括了O-RU下行模块的内部处理时间
- Ta3:从天线接口(Ra)到O-RU发射接口(R3)的延迟,也就是O-RU上行模块的内部处理时间
- T34:从O-RU发射接口(R3)到O-DU接收接口(R4)的上行传输延迟
- Ta4:=Ta3+T34,从天线端口(Ra)到O-DU接收接口(R4)的上行传输延迟,包括了O-RU上行模块的内部处理时间
传输延迟仅包括从一个bit离开发送方(R1/R3)到在接收方(R2/R4)接收的时间。在以太网传输网络中,由于交换延迟(即PDV,传输路径的延迟值),传输延迟可能不是恒定的。为了说明这一点,应使用一个范围来考虑传输延迟,也就是上边界和下边界。
- 下行传输延迟:T12min / T12max
- T12min:从O-DU发射接口(R1)到O-RU接收接口(R2)的最小传输延迟,也就是传输过程中用时最少的一个或多个bit的传输时长。
- T12max:从O-DU发射接口(R1)到O-RU接收接口(R2)的最大传输延迟,也就是传输过程中用时最多的一个或多个bit的传输时长。
- 上行传输延迟:T34min / T34max
- T34min:从O-RU发射接口(R3)到O-DU接收接口(R4)的最小传输延迟,也就是传输过程中用时最少的一个或多个bit的传输时长。
- T34max:从O-RU发射接口(R3)到O-DU接收接口(R4)的最大传输延迟,也就是传输过程中用时最多的一个或多个bit的传输时长。
由于要保证空口传输时间,必须固定Ra处的定时。因此,在eCPRI模型中,Ra被用作延迟管理的参考点。其他参考点处的发送和接收都相对于Ra进行测量,并得到以下参数:

在下行方向:
- T1a:测量从O-DU发射接口(R1)到通过空口发送(即O-RU天线接口Ra)的时延,R1到Ra的最短时间T1amin,R1到Ra的最长时间T1amax
- T2a:测量从O-RU接收接口(R2)到通过空口发送(即O-RU天线接口Ra)的时延,R2到Ra的最短时间T2amin,R2到Ra的最长时间T2amax,T2amin和T2amax反映了O-RU内部的下行处理时延
在上行方向:
- Ta4:测量从O-RU天线接口(Ra)到O-DU接收接口(R4)的时延,Ra到R4的最短时间Ta4min,Ra到R4的最长时间Ta4max
- Ta3:测量从O-RU天线接口(Ra)到O-RU发射接口(R3)的时延,Ra到R3的最短时间Ta3min,Ra到R3的最长时间Ta3max,Ta3min和Ta3max反映了O-RU内部的上行处理时延
预期在链路的两端使用公共时间刻度。出于时延要求管理的目的,O-DU和O-RU之间的S平面测量信号的相对时间误差应在3µs(±1.5微秒)的限制范围内。
- 该要求允许传输延迟(即O-DU和O-RU UNI之间)的测量,其测量误差最大限度地低于待测量的延迟(例如,低10倍)。
UNI:User Network Interface,eCPRI网络需求规范中定义的用户网络接口
- 在LLS-C1和LLS-C2的情况下,根据S平面频率和时间同步的要求,O-DU和O-RU之间的S平面测量信号的相对时间误差始终在3µs(±1.5微秒)的限制范围内。
- 在LLS-C3和LLS-C4的情况下,同步网络需要满足G.8271.1或G.8271.2网络限制,以满足类似要求(O-DU和O-RU之间的S平面测量信号的相对时间误差在3µs的限制范围内)。
关于LLS-C1到LLS-C4的描述,参考S平面中关于时钟模型和同步拓扑的介绍。
- 在O-DU S平面上的绝对时间误差要求的上边界,由O-RU的接收窗、传输网络中的延迟和PDV,以及O-DU的内部延迟共同决定。
2)定时参数之间的关系
为了确保接收方通过数据包接口正确接收数据,对于上面一节中定义的参数,应满足这些参数之间的若干关系。
首先,了解传播本身的性质非常重要。在任一方向(DL/UL)上,发送方(O-DU/O-RU)都需要一些时间,以实际将数据包传输到传输介质上。然而,对于任何间隔(例如,symbol),其数据量都可能发生变化,从而导致不同的传输时间。传输时间可能受多个因素影响,包括(但不限于)传输介质速率、空口带宽和数据压缩量。发送方在一个时间间隔(传输窗口)内发送所有数据所允许的最大时间量由T1amax–T1amin定义,这也是下行传输窗的范围。这里需要说明的是,对于任意一个时间间隔,在Ra处的发送时间(DL方向)是固定的,T1amax表示从O-DU发射接口(R1)到天线接口(Ra)传输的所有bit中,用时最长的,同理,T1amin则表示所有bit中用时最短的,所以说两者相减刚好是整个传输过程所经历的时间范围。
注,这是基于传输和O-RU特性所允许的时间。接下来会进行更详细的解释,并说明其对O-DU的影响。
为了考虑传输变化和传输时间,接收方应实现一个接收窗。这允许在时间窗内接收包含特定symbol的IQ数据的数据包,并且仍然在要求的时间由Ra处发送。接收窗的大小应同时考虑发送方的最大传输时间和通过前传网络的传输变化。例如,在DL中,应同时考虑T1amax,T1amin和T12max,T12min。以下公式就是应满足的第一个延迟关系,以确保有效的延迟方案。
Reception Window ≥ Transmission Window + Transport Variation
接收窗 ≥ 发送窗 + 传输变化

对于下行,最早的接收时间T2amax,可以是R1到Ra的最长时间T1amax(即O-DU发送的最早时间),减去电缆传输的最小时间T12min;而最晚的接收时间T2amin,可以是R1到Ra的最短时间T1amin(即O-DU发送的最晚时间),减去电缆传输的最大时间T12max,所以接收窗T2amax-T2amin至少应满足(T1amax-T12min)-(T1amin-T12max),即(T1amax-T1amin)+(T12max-T12min)。
对于上行,最早的接收时间Ta4min,可以是Ra到R3的最短时间Ta3min(即O-RU发送的最早时间),加上电缆传输的最小时间T34min;而最晚的接收时间Ta4max,可以是Ra到R3的最长时间Ta3max(即O-RU发送的最晚时间),加上电缆传输的最大时间T34max,所以接收窗Ta4max-Ta4min至少应满足(Ta3max+T34max)-(Ta3min+T34min),即(Ta3max-Ta3min)+(T34max-T34min)。

相对于空口,O-RU的接收窗和发送窗在时间上的位置是固定的。然而,在O-DU处,相应窗口的位置则是O-RU和传输参数的方程。为了保证在O-RU接收窗内,接收到从O-DU发送到O-RU的数据包,应满足下表中的关系。

在O-RU接收窗固定的情况下,结合上面的图可以看出:
- 在下行中,O-DU的发送时间,不早于T1amax,如果T1amax大于T2amax+T12min,则O-DU发送的最早部分数据,O-RU可能接收不到,所以必须满足T1amax ≤ T2amax + T12min
- 在下行中,O-DU的发送时间,不晚于T1amin,如果T1amin小于T2amin+T12max,则O-DU发送的最晚部分数据,O-RU可能接收不到,所以必须满足T1amin ≥ T2amin + T12max
- 在上行中,O-DU的接收时间,不晚于Ta4min,如果Ta4min大于Ta3min+T34min,则O-RU发送的最早部分数据,O-DU可能接收不到,所以必须满足Ta4min ≤ Ta3min + T34min
- 在上行中,O-DU的接收时间,不早于Ta4max,如果Ta4max小于Ta3max+T34max,则O-RU发送的最晚部分数据,O-DU可能接收不到,所以必须满足Ta4max ≥ Ta3max + T34max
注:个人认为,表4.3.1-2中,O-DU的UL接收窗描述不准确,应该是不晚于Ta4min,且不早于Ta4max。
3)O-DU传输窗
U平面O-DU传输窗(T1amax-T1amin)是基于O-RU接收窗和最大传输变化,由以上延迟关系定义的。没有定义从O-DU传输的确切时间。相反,定义的是U平面O-DU传输的上下边界,O-DU必须在边界内完成传输操作。时间窗仅表示由于O-RU和传输的限制而作用在O-DU上的数学边界。
基于对O-DU,传输和O-RU中任意两个的了解,可以定义对另一个的限制条件。然而,通常会基于设备来预定义O-RU的限制条件,并且传输是整个网络目标的一部分。
根据延迟关系计算的时间窗,必须大于或等于O-DU需要的实际最大传输时间(![]() ),以便为一个symbol传输所有数据。也就是说,窗口必须足够大,即便在最坏的情况下,O-DU也能在窗口内完成传输。其中,在窗口内,O-DU传输(例如,开始,中间,结束),以及O-DU传输消耗的时间,则是O-DU的设计问题。
),以便为一个symbol传输所有数据。也就是说,窗口必须足够大,即便在最坏的情况下,O-DU也能在窗口内完成传输。其中,在窗口内,O-DU传输(例如,开始,中间,结束),以及O-DU传输消耗的时间,则是O-DU的设计问题。
以下DL示例说明了这个概念:
- O-RU参数:T2amin = 100 μs,T2amax = 260 μs
- 传输参数(已知长度的直连光纤):T12min = 50 μs,T12max = 51 μs
则计算出的O-DU传输窗如下:
- T1amax ≤ 260 + 50,即必须小于等于310 μs,否则O-DU发送的最早部分数据,O-RU可能接收不到
- T1amin ≥ 100 + 51,即必须大于等于151 μs,否则O-DU发送的最晚部分数据,O-RU可能接收不到
这为O-DU提供了非常大的发送窗口,T1amax - T1amin = 159 μs。如果,![]() 只有30μs,也就是说O-DU必须在30μs内发送完一个时间周期内的全部数据,则O-DU可以决定在时间窗内的什么位置开始发送数据,只要保证传输在T1amin之前完成即可。
只有30μs,也就是说O-DU必须在30μs内发送完一个时间周期内的全部数据,则O-DU可以决定在时间窗内的什么位置开始发送数据,只要保证传输在T1amin之前完成即可。
如果O-DU与一个接收窗较小的O-RU配对,例如,T2amin = 100 μs,T2amax = 150 μs,使用的传输网络具有相同T12min,50 μs,但是具有15 μs的PDV,也就是传输路径上可能有15 μs延迟,所以T12max = 65 μs,则计算结果变为:
- T1amax ≤ 150 + 50,即必须小于等于200 μs
- T1amin ≥ 100 + 65,即必须大于等于165 μs
虽然延迟方案依然可以工作(满足200 - 165 ≥ 30 μs),但是边界的余量小了很多,对于O-DU在时间窗内开始传输的位置,其灵活性也小了很多。
C平面O-DU传输窗与U平面O-DU传输窗具有相同的概念。然而,与U平面O-DU传输窗相比,C平面O-DU传输窗的尺寸更大,因此,可以在时间上更早开始传输。
在特定场景下,例如使用Section扩展11为mMIMO应用发送实时BFW(beamforming weights),C平面消息需要在时间上分散开,以避免峰值throughput。下图说明了与U平面时间窗相比,使用较长的C平面tx/rx时间窗的好处。由于BFW的数据量较大,如果C平面消息的发送时间窗较短(红色部分),很容易产生峰值throughput,在带宽一定的情况下,影响其他数据的传输。通过增大C平面消息的发送时间窗(黄色部分),可以在较长的时间内均匀发送C平面消息,从而减少带宽的占用率。

4)U平面和C平面定时
上面所述的基本延迟参数,描述了ORAN接口的通用延迟模型和特性,而ORAN接口又分为C平面和U平面部分,为了处理相应的U平面数据包,相关的C平面消息必须是可用的。为了支持C平面和U平面定时的配合,ORAN接口规定,C平面消息应在第一个对应的U平面消息可能到达的最晚时间之前,提前某个时间量(Tcp_adv_dl)到达O-RU。
注:Tcp_adv_dl可能被设置为0,但ORAN延迟模型不能做这样的假设。
下图定义了ORAN的下行链路定时关系和参数。

从上图中可以得到的信息包括:
![]() = 0表示天线端口(即空口)处的DL定时,也就是参考点Ra
= 0表示天线端口(即空口)处的DL定时,也就是参考点Ra
T1a_max_cp_dl(绿色)表示O-DU最早发送下行C平面消息时,相对于Ra提前的时间,也就是O-DU下行C平面发送窗的开始
T1a_min_cp_dl(绿色)表示O-DU最晚发送下行C平面消息时,相对于Ra提前的时间,也就是O-DU下行C平面发送窗的结束
所以T1a_max_cp_dl和T1a_min_cp_dl中间的时间就是O-DU下行C平面的发送窗。
T1a_max_up(蓝色)表示O-DU最早发送下行U平面消息时,相对于Ra提前的时间,也就是O-DU下行U平面发送窗的开始
T1a_min_up(蓝色)表示O-DU最晚发送下行U平面消息时,相对于Ra提前的时间,也就是O-DU下行U平面发送窗的结束
所以T1a_max_up和T1a_min_up中间的时间就是O-DU下行U平面的发送窗。
T2a_max_cp_dl(绿色)表示O-RU最早接收下行C平面消息时,相对于Ra提前的时间,也就是O-RU下行C平面接收窗的开始
T2a_min_cp_dl(绿色)表示O-RU最晚接收下行C平面消息时,相对于Ra提前的时间,也就是O-RU下行C平面接收窗的结束
所以T2a_max_cp_dl和T2a_min_cp_dl中间的时间就是O-RU下行C平面的接收窗。
T2a_max_up(蓝色)表示O-RU最早接收下行U平面消息时,相对于Ra提前的时间,也就是O-RU下行U平面接收窗的开始
T2a_min_up(蓝色)表示O-RU最晚接收下行U平面消息时,相对于Ra提前的时间,也就是O-RU下行U平面接收窗的结束
所以T2a_max_up和T2a_min_up中间的时间就是O-RU下行U平面的接收窗。
T12_max(红色)表示DL前传的最大网络传输延时。
由于上图中O-DU发送窗的上边界与O-RU接收窗的上边界重合,所以假设DL前传的最小网络传输延时为0,即T12_min = 0。
ORAN不假设C平面和U平面的传输窗口大小相同。如图所示,Tcp_adv_dl允许发送窗和接收窗各自不同的对齐。
参考点(表示为![]() = 0)是一个symbol内时域中传输IQ sample(包括循环前缀)的最早时间,这些IQ sample是从指定symbol(根据symbolId)接收到的U平面IQ数据(频域)中生成的,可选择由timeOffset进行调整(参考C平面消息section type 0和3)。
= 0)是一个symbol内时域中传输IQ sample(包括循环前缀)的最早时间,这些IQ sample是从指定symbol(根据symbolId)接收到的U平面IQ数据(频域)中生成的,可选择由timeOffset进行调整(参考C平面消息section type 0和3)。
一个DL C平面消息可以涉及一个或多个symbol,对于涉及多个symbol的DL C平面消息,其发送窗和接收窗是相对于所涉及的最早symbol而言的,该symbol由startSymbolId字段指示,可选择由timeOffset进行调整(参考C平面消息section type 0和3)。
对于上行链路,C平面消息是从O-DU发送到O-RU,而U平面消息是从O-RU发送到O-DU。
由于C平面消息是从O-DU发送到O-RU,所以使用R1/R2参考点,以及相应的定时参数。然而,UL C平面定时不是相对于DL C平面或U平面定时来描述的,而是相对于Ra进行描述。对于非PRACH信道,下图定义了ORAN的上行链路延迟模型。

从上图中可以得到的信息包括:
![]() = 0表示天线端口(即空口)处的UL定时,也就是参考点Ra
= 0表示天线端口(即空口)处的UL定时,也就是参考点Ra
T1a_max_cp_ul(绿色)表示O-DU最早发送上行C平面消息时,相对于Ra提前的时间,也就是O-DU上行C平面发送窗的开始
T1a_min_cp_ul(绿色)表示O-DU最晚发送上行C平面消息时,相对于Ra提前的时间,也就是O-DU上行C平面发送窗的结束
所以T1a_max_cp_ul和T1a_min_cp_ul中间的时间就是O-DU上行C平面的发送窗。
T2a_max_cp_ul(绿色)表示O-RU最早接收上行C平面消息时,相对于Ra提前的时间,也就是O-RU上行C平面接收窗的开始
T2a_min_cp_ul(绿色)表示O-RU最晚接收上行C平面消息时,相对于Ra提前的时间,也就是O-RU上行C平面接收窗的结束
所以T2a_max_cp_ul和T2a_min_cp_ul中间的时间就是O-RU上行C平面的接收窗。
T12_max(红色)表示DL前传的最大网络传输延时。
T12_min(红色)表示DL前传的最小网络传输延时。
Ta3_min(蓝色)表示O-RU最早发送上行U平面消息时,相对于Ra推迟的时间,也就是O-RU上行U平面发送窗的开始
Ta3_max(蓝色)表示O-RU最晚发送上行U平面消息时,相对于Ra推迟的时间,也就是O-RU上行U平面发送窗的结束
所以Ta3_min和Ta3_max中间的时间就是O-RU上行U平面的发送窗。
Ta4_min(蓝色)表示O-DU最早接收上行U平面消息时,相对于Ra推迟的时间,也就是O-DU上行U平面接收窗的开始
Ta4_max(蓝色)表示O-DU最晚接收上行U平面消息时,相对于Ra推迟的时间,也就是O-DU上行U平面接收窗的结束
所以Ta4_min和Ta4_max中间的时间就是O-DU上行U平面的接收窗。
T34_min(红色)表示UL前传的最小网络传输延时。
T34_max(红色)表示UL前传的最大网络传输延时。
由于![]() = 0(Ra)处是O-RU天线端口接收到数据的时间,所以O-RU对U平面的处理,发送,以及O-DU对U平面的接收,都在Ra之后。
= 0(Ra)处是O-RU天线端口接收到数据的时间,所以O-RU对U平面的处理,发送,以及O-DU对U平面的接收,都在Ra之后。
一个描述非PRACH信道的UL C平面消息可以涉及一个或多个symbol。UL C平面消息的参考点(表示为![]() = 0)是时域中最早的IQ sample(从循环前缀开始)的接收时间,该IQ sample属于C平面消息所涉及的U平面消息中最早的symbol,由startSymbolId字段提供;如果使用section type 3,timeOffset也将指向这个参考点,即从timeOffset给定的位置开始接收IQ sample。
= 0)是时域中最早的IQ sample(从循环前缀开始)的接收时间,该IQ sample属于C平面消息所涉及的U平面消息中最早的symbol,由startSymbolId字段提供;如果使用section type 3,timeOffset也将指向这个参考点,即从timeOffset给定的位置开始接收IQ sample。
上述参考点(![]() = 0)也用于非PRACH信道的UL U平面消息,即一个symbol内时域中最早的IQ sample(从循环前缀开始)的接收时间,该symbol由symbolId字段提供;如果使用section type 3,timeOffset也指向这个参考点。注:
= 0)也用于非PRACH信道的UL U平面消息,即一个symbol内时域中最早的IQ sample(从循环前缀开始)的接收时间,该symbol由symbolId字段提供;如果使用section type 3,timeOffset也指向这个参考点。注:![]() = 0不受M平面配置的FFT采样偏移的影响,因为配置的FFT采样偏移不能长于CP长度。
= 0不受M平面配置的FFT采样偏移的影响,因为配置的FFT采样偏移不能长于CP长度。
由于PRACH symbol的CP长度和symbol长度的相关特征(取决于PRACH format),PRACH以单独的方式处理。特别是对于长preamble PRACH format 0~3(参考3GPP 38.211),其CP部分和可重复部分的长度都远大于PUSCH symbol的相应部分。对于其他PRACH format(A1~C2),与PUSCH symbol的CP相比,CP的长度可能非常长,例如PRACH format C2,其CP长度大于是PUSCH symbol的CP长度的14倍。特定PRACH format的长CP或长重复部分会导致Ta3_min和Ta3_max的值增加,因此,O-RU提供的这些参数值不包括PRACH CP持续时间和重复部分的数量。在计算PRACH的延迟参数时,需要跳过CP部分。
O-DU知道所使用的PRACH format的特征,如CP长度,重复次数,根据这些信息,O-DU可以计算接收窗的位置和大小(Ta4_min和Ta4_max)。对于用于PRACH的SCS,Ta3_min和Ta3_max使用的值是从O-RU取回的。
一个描述PRACH信道的UL C平面消息可以涉及一个或多个PRACH序列(PRACH重复)的重复部分,这取决于PRACH format。对于具有重复的PRACH format,对于一个特定的PRACH时机,仅使用一个C平面消息指示所有PRACH重复。也就是说,一次PRACH的U平面消息仅与一个PRACH C平面消息相关联。
PRACH C平面消息的参考点由startSymbolId指出:
- 是时域中最早的IQ sample(从循环前缀开始)的接收时间,该IQ sample应属于此C平面消息所指示的PRACH重复;
- 这仅适用于没有重复的PRACH format,并且是在一个slot中仅有一个PRACH时机的PRACH format,例如PRACH format 0。
- 这种情况下,在PRACH C平面消息(section type 3)中,cpLength字段被设置为非0值,该值应指示实际的CP持续时间。
- 或者从最近的一个symbol定时开始,该symbol定时恰好是时域中最早的IQ sample(在PRACH循环前缀之后)的接收时间,或者早于IQ sample的接收时间,该IQ sample应属于此C平面消息所指示的第一个PRACH重复;
- 这种方式适用于所有PRACH format。
- 这种情况下,在PRACH C平面消息(section type 3)中,cpLength字段被设置为0。
- 如果“frameStructure”字段提供的SCS值等于或大于15kHz,则用于决定“startSymbolId”字段的symbol定时是基于“frameStructure”字段提供的SCS值对应的numerology。否则,如果“frameStructure”字段提供的SCS值小于15kHz,例如,长preamble PRACH format,则用于决定“startSymbolId”字段的symbol定时是基于15kHz SCS对应的numerology。
- 当用于PRACH的ul-fft-sampling-offset由M平面配置为非0值时,最早的IQ sample的定时会根据该值提前。然而,在PRACH C平面消息中,用于决定“startSymbolId”值的参考symbol定时不受ul-fft-sampling-offset影响,因此,对于一个PRACH,与ul-fft-sampling-offset的值等于0的情况相比,如果ul-fft-sampling-offset的值不是0,则上面所描述的“最近的一个symbol定时,该symbol定时恰好是时域中最早的IQ sample(在PRACH循环前缀之后)的接收时间,或者早于IQ sample的接收时间,该IQ sample应属于此C平面消息所指示的第一个PRACH重复”,可能会改变为更早的一个symbol定时,也就是说其参考symbol会变成之前的一个symbol。因此,O-DU在确定startSymbolId值时,需要考虑PRACH的ul-fft-sampling-offset值。然而,需要注意的是,即使为一个PRACH配置的ul-fft-sampling-offset值不等于0,预计这个值也是纳秒量级的,即少于1毫秒。
PRACH U平面消息的参考点,是在该消息提供的PRACH重复(在PRACH循环前缀之后)内,时域中最早的IQ sample的接收时间。
- 对于第一个PRACH重复:
- 如果在与这个PRACH重复相关的PRACH C平面消息(section type 3)中,设置cpLength为非0值,则PRACH U平面消息的参考点应指向
- timeOffset (指向PRACH循环前缀的开始) + cpLength – ul-fft-sampling-offset (用于PRACH)
- 如果在与这个PRACH重复相关的PRACH C平面消息(section type 3)中,设置cpLength为0,则PRACH U平面消息的参考点应指向
- timeOffset (指向PRACH重复的开始,在PRACH循环前缀之后) – ul-fft-sampling-offset (用于PRACH)
- 如果在与这个PRACH重复相关的PRACH C平面消息(section type 3)中,设置cpLength为非0值,则PRACH U平面消息的参考点应指向
- 对于后续的PRACH重复(用于具有多个重复的PRACH format),PRACH U平面消息的参考点按PRACH序列持续时间偏移,每次偏移一个PRACH序列的长度,始终保持在每个PRACH重复的最早IQ sample接收时间的位置。
下面几张图分别举例说明了PRACH format 0,format 1,format B4和format C0四种PRACH format配置下的定时参数关系(基于15kHz SCS)。

对于PRACH format 0:
PRACH C平面参考点可以满足上面两种情况,cpLength设置为0或设置为非0。
- cpLength ≠ 0时,startSymbolId应等于0,PRACH C平面消息的参考点是symbol 0的开始位置。
- cpLength = 0时,startSymbolId应等于1,PRACH C平面消息的参考点是symbol 1的开始位置。
与PRACH C平面参考点不同,PRACH C平面参考点仅与startSymbolId和ul-fft-sampling-offset相关,而PRACH U平面消息参考点还需要考虑timeOffset,以使其参考点位于PRACH重复的开始位置。
- 当cpLength设置为实际CP持续时间时,timeOffset应设置为0。
- 当cpLength设置为0时,timeOffse应设置为指向PRACH重复开始位置的值。

对于PRACH format 1:
PRACH C平面参考点应由startSymbolId指定,并设置startSymbolId = 9,cpLength = 0。
PRACH U平面参考点分别为两个PRACH重复部分的开始位置,其中第一个PRACH重复部分的开始位置由timeOffset给出,第二个PRACH重复部分的开始位置从前一个PRACH重复部分的参考点向后偏移,偏移长度为一个PRACH序列的持续时间。

对于PRACH format B4:
PRACH C平面参考点应由startSymbolId指定,并设置startSymbolId = 0,cpLength = 0。
PRACH U平面参考点分别为12个PRACH重复部分的开始位置,其中第一个PRACH重复部分的开始位置由timeOffset给出,后续所有PRACH重复部分的开始位置从前一个PRACH重复部分的参考点向后偏移,偏移长度为一个PRACH序列的持续时间。

对于PRACH format C0:
PRACH C平面参考点应由startSymbolId指定,每个PRACH时机具有不同的startSymbolId,startSymbolId = 0,2,4,6,8,10,12,且对于所有PRACH时机,cpLength = 0。
对于每个PRACH时机,PRACH U平面的参考点分别为其PRACH重复部分的开始位置,由timeOffset给出。注:timeOffset从slot边界开始计算,因此,每个PRACH时机的timeOffset是不同的。
下表总结了ORAN延迟模型的参数,分别包括了O-DU,O-RU,以及网络传输的上行和下行参数。每个参数代表的意义在前面均有详细说明。

下表定义了下行不同延迟模型参数之间的关系。

对于U平面:
- O-DU的最早发送位置,即发送窗的开始,应满足T1a_max_up ≤ T2a_max_up + T12_min,否则O-DU最早发送的部分数据,O-RU可能收不到。
- O-DU的最晚发送位置,即发送窗的结束,应满足T1a_min_up ≥ T2a_min_up + T12_max,否则O-DU最晚发送的部分数据,O-RU可能收不到。
对于C平面:
- O-DU的最早发送位置,即发送窗的开始,应满足T1a_max_cp_dl ≤ T2a_max_cp_dl + T12_min,否则O-DU最早发送的部分数据,O-RU可能收不到。
- O-DU的最晚发送位置,即发送窗的结束,应满足T1a_min_cp_dl ≥ T2a_min_cp_dl + T12_max,否则O-DU最晚发送的部分数据,O-RU可能收不到。
下表定义了上行不同延迟模型参数之间的关系。

对于U平面:
- O-DU的最早接收位置,即接收窗的开始,应满足Ta4min ≤ Ta3min + T34min,否则O-RU最早发送的部分数据,O-DU可能收不到。
- O-DU的最晚接收位置,即接收窗的结束,应满足Ta4max ≥ Ta3max + T34max,否则O-RU最晚发送的部分数据,O-DU可能收不到。
对于C平面:
- O-DU的最早发送位置,即发送窗的开始,应满足T1a_max_cp_ul ≤ T2a_max_cp_ul + T12_min,否则O-DU最早发送的部分数据,O-RU可能收不到。
- O-DU的最晚发送位置,即发送窗的结束,应满足T1a_min_cp_ul ≥ T2a_min_cp_ul + T12_max,否则O-DU最晚发送的部分数据,O-RU可能收不到。
为使ORAN接口正常工作,O-DU处的发送窗和接收窗必须正确对齐。O-RU的发送窗和接收窗总是基于Ra对齐。O-DU要对齐发送窗和接收窗,需要遵循:
- O-RU的延迟特性
- 传输网络的延迟特性
报告O-RU延迟特性的预期精度为200ns,200ns的值是在非常高的精度(几十纳秒)和更适度的精度(约0.5微秒)之间的做出的折衷,前者使O-RU中的缓冲更容易实现,后者则更容易控制以太网的实现。该精度仅适用于报告接收窗和发送窗的开始和结束时间(相对于Ra)。Ra是由相应的空口标准和支持的功能所定义的固定参考点。
例如,如果O-RU报告T2a_min_up(下行U平面接收窗的结束位置)为20µs,则O-RU可以在一个symbol的空口传输时间(Ra)之前19.8µs到20.2µs开始处理数据。然而,O-RU仍然应该按空口标准定义的精度,通过无线进行传输。实际上,Ra之前19.8µs到20.2µs是保证一个symbol内O-RU收齐所有数据的时间,也就是O-RU处理这些数据所需要的时间。如果在Ra位置O-RU不能完成这个symbol内所有数据的处理,则接收窗的结束位置应该提前。
接下来将会介绍ORAN支持的方法,用于向O-DU提供其需要的正确信息,以对齐发送窗和接收窗。

对于定义的传输方法:
- O-RU延迟,需要定义可用于O-DU的O-RU特定值
- 传输延迟,使用预定义的最大和最小值
对于测量的传输方法:
- O-RU延迟,需要测量可用于O-DU的O-RU特定值
- 传输延迟,使用测量的最小值,和通过SLA预定义的传输路径延迟的最大值(无法通过测量得到最大传输延迟)
5)基于计算的延迟方法
如前所述,ORAN接口延迟管理的目标是确保O-DU的发送窗/接收窗正确对齐,以支持O-RU和传输网络特性。计算方法要求O-DU基于O-RU的延迟特性和传输网络特性,计算其所需的发送窗和接收窗。然后,O-DU可以确定,该O-DU是否能够适应所需的发送窗和接收窗。如果可以,则将其发送窗和接收窗(基于O-DU设计)设置为最合适的配置。例如,O-DU可以具有几种固定的发送窗和接收窗的组合。然后,O-DU可以在这几种组合中选择最适合所连接O-RU的传输延迟(T12/T34)和O-RU延迟特性。
如果O-DU不能适应所需的发送窗和接收窗,则O-DU应发出一些通知。

基于上表中的DL延迟关系,在O-DU处对齐发送窗要求满足以下条件:
- O-DU应该有能力发送DL U平面消息 (T1a_min_up / T1a_max_up)
- 应确保足够早,使得O-RU在T2a_min_up之前接收消息,即在T1a_min_up之前发送
- 应确保足够晚,使得O-RU在T2a_max_up或之后接收消息,即在T1a_max_up之后发送
- 同样,O-DU必须有能力在相应的窗口中发送C平面消息,即在T1a_min_cp_dl之前,且在T1a_max_cp_dl之后发送

基于上表中的UL延迟关系,在O-DU处对齐接收窗要求满足以下条件:
- O-DU应设置其UL U平面消息的接收窗(Ta4_min,Ta4_max)
- 应确保足够早,使得UL U平面消息在Ta4_max之前被接收
- 应确保足够晚,使得UL U平面消息在Ta4_min之后被接收
为使延迟管理正常运行,应满足以下O-DU限制条件:

U平面发送窗:
- 最大所需发送窗,
 ,应满足T1a_max_up – T1a_min_up ≥ ,即O-DU实际发送所需的最大发送窗不应大于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗,否则O-RU可能无法接收全部数据
,应满足T1a_max_up – T1a_min_up ≥ ,即O-DU实际发送所需的最大发送窗不应大于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗,否则O-RU可能无法接收全部数据 - 支持的最大T1a_max_up,
 ,应满足 ≥ T1a_max_up,即O-DU能够支持的发送窗开始位置,不应小于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗开始位置,否则可能造成O-DU发送数据晚于预期
,应满足 ≥ T1a_max_up,即O-DU能够支持的发送窗开始位置,不应小于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗开始位置,否则可能造成O-DU发送数据晚于预期
接收窗:
- 支持的最大接收窗,
 ,应满足 ≥ Ta4_max - Ta4_min,即O-DU接收窗的能力不应小于根据O-RU延迟特性和网络传输特性确定的O-DU接收窗,否则O-DU可能无法接收全部数据
,应满足 ≥ Ta4_max - Ta4_min,即O-DU接收窗的能力不应小于根据O-RU延迟特性和网络传输特性确定的O-DU接收窗,否则O-DU可能无法接收全部数据 - 支持的最大上行参考点Ra,
 , ≥ Ta4_max,即O-DU能够支持的接收窗结束位置,不应小于根据O-RU延迟特性和网络传输特性确定的O-DU接收窗结束位置,否则O-DU可能无法接收最后的部分数据
, ≥ Ta4_max,即O-DU能够支持的接收窗结束位置,不应小于根据O-RU延迟特性和网络传输特性确定的O-DU接收窗结束位置,否则O-DU可能无法接收最后的部分数据
C平面发送窗:
- 最大所需发送窗,
 ,应满足T1a_max_cp_dl – T1a_min_cp_dl ≥ ,即O-DU实际发送所需的最大发送窗不应大于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗,否则O-RU可能无法接收全部数据
,应满足T1a_max_cp_dl – T1a_min_cp_dl ≥ ,即O-DU实际发送所需的最大发送窗不应大于根据O-RU延迟特性和网络传输特性确定的O-DU传输窗,否则O-RU可能无法接收全部数据
如果违反任何O-DU限制条件,则无法确保正确的延迟操作。
1)前传时域
当使用基于计算的延迟方法时,应考虑O-DU延迟参数适用的定义域。对于O-DU和O-RU物理前传接口端口,计算后的O-DU延迟参数集合将应用到这些端口,这些参数是在时域中定义的。O-DU时域可以包括单个O-DU端口,也可以包括多个O-DU端口,其中O-DU需要将相同的O-DU时域参数应用到所有O-DU端口。
同样,定义域中每个O-DU端口可以支持到单个或多个O-RU端口的ORAN C平面/U平面通信。因此,一个前传时域包括一个或多个O-DU物理前传接口端口,以及一个或多个O-RU物理前传接口端口。
当计算O-DU的发送窗和接收窗时,O-DU的单组延迟参数应包含定义域内传输延迟特性和O-RU延迟特性的最坏情况。使用以下定义:
- 时域的传输网络参数
 :在O-DU物理前传接口端口(i)和O-RU物理前传接口端口(j)之间的T12_min
:在O-DU物理前传接口端口(i)和O-RU物理前传接口端口(j)之间的T12_min :在O-DU物理前传接口端口(i)和O-RU物理前传接口端口(j)之间的T34_min
:在O-DU物理前传接口端口(i)和O-RU物理前传接口端口(j)之间的T34_min
注:假定在时域中有多个T12_min或多个T34_min值,则传输延迟特性是测量的。对于测量的传输延迟,是不可能测量最大延迟的。在这种情况下,T12_max和T34_max是通过在相应的最小传输延迟值上增加一个预定义的(例如,通过SLA)最坏情况变化值(PDVmax)来计算的。

上表列出了时域中O-RU端口“j”的无线延迟参数:
DL U平面:最小值![]() ,最大值
,最大值![]()
UL U平面:最小值![]() ,最大值
,最大值![]()
DL C平面:最小值![]() ,最大值
,最大值![]()
UL C平面:最小值![]() ,最大值
,最大值![]()
Tcp_adv_dl在定义域内的RU之间可能不同,因此,应使用T2a_min_cp_dl和T2a_max_cp_dl来决定DL C平面时间窗。

上表列出了用于决定时域内O-DU时间窗的网络传输参数:
在DL中,最小值为T12_min = MIN(![]() ),即所有O-DU端口i和O-RU端口j之间的T12_min的最小值
),即所有O-DU端口i和O-RU端口j之间的T12_min的最小值
最大值为T12_max = MAX(![]() ) + PDVmax,即所有O-DU端口i和O-RU端口j之间的T12_min的最大值,加上传输路径的最大延迟变化值
) + PDVmax,即所有O-DU端口i和O-RU端口j之间的T12_min的最大值,加上传输路径的最大延迟变化值
在UL中,最小值为T34_min = MIN(![]() ),即所有O-DU端口i和O-RU端口j之间的T34_min的最小值
),即所有O-DU端口i和O-RU端口j之间的T34_min的最小值
最大值为T34_max = MAX(![]() ) + PDVmax,即所有O-DU端口i和O-RU端口j之间的T34_min的最大值,加上传输路径的最大延迟变化值
) + PDVmax,即所有O-DU端口i和O-RU端口j之间的T34_min的最大值,加上传输路径的最大延迟变化值

上表列出了用于决定时域内O-DU时间窗的O-RU延迟参数:
在DL中:
U平面最小值为T2a_min_up = MAX(![]() ) ,即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据,使用更小的
) ,即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据,使用更小的![]() 可能导致部分O-RU在Ra之间来不及处理所有数据
可能导致部分O-RU在Ra之间来不及处理所有数据
U平面最大值为T2a_max_up = MIN(![]() ) ,即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的
) ,即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的![]() 可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
C平面最小值为T2a_min_cp_dl = MAX(![]() ),即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据
),即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据
C平面最大值为T2a_max_cp_dl = MIN(![]() ),即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的
),即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的![]() 可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
在UL中:
U平面最小值为Ta3_min = MIN(![]() ),即所有O-RU端口发送窗左边界的最小值,必须保证O-RU发送的所有数据都能被O-DU接收到,使用更大的
),即所有O-RU端口发送窗左边界的最小值,必须保证O-RU发送的所有数据都能被O-DU接收到,使用更大的![]() 可能导致O-DU错过O-RU最早发送的部分数据
可能导致O-DU错过O-RU最早发送的部分数据
U平面最大值为Ta3_max = MAX(![]() ) ,即所有O-RU端口发送窗右边界的最大值,必须保证O-RU发送的所有数据都能被O-DU接收到,使用更小的
) ,即所有O-RU端口发送窗右边界的最大值,必须保证O-RU发送的所有数据都能被O-DU接收到,使用更小的![]() 可能导致O-DU错过O-RU最晚发送的部分数据
可能导致O-DU错过O-RU最晚发送的部分数据
C平面最小值为T2a_min_cp_ul = MAX(![]() ),即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据
),即所有O-RU端口接收窗右边界的最大值,必须保证所有O-RU端口接收到数据后,O-RU有足够的时间处理数据
C平面最大值为T2a_max_cp_ul = MIN(![]() ),即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的
),即所有O-RU端口接收窗左边界的最小值,必须保证所有O-RU端口都能接收到全部数据,使用更大的![]() 可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
可能导致部分O-RU端口接收不到O-DU最早发出的部分数据
上面定义的两个表格用于推导网络传输参数和O-RU延迟参数,并在以下表4.3.2-2和表4.2.2-3中定义的时序关系中使用(即根据网络传输参数和O-RU延迟参数,计算O-DU的延迟参数),以支持下面定义的计算方法。


当使用基于计算的延迟方法时,ORAN考虑了两种情况:
1)基于定义的传输方法:网络延迟是预定义的(通常由网络运营商定义),并基于预定义的网络延迟进行延迟计算。该定义通常考虑最大网络时延,并假设可以更容易地支持较小的延迟。
2)基于测量的传输方法:网络延迟是基于对上行和下行数据包时延的实际测量来估计的(有时假定上行和下行的延迟是对称的,但这并不是必需的)。
无论使用基于定义的传输方法,还是使用基于测量的传输方法,计算方式基本相同。下面对两种方法分别进行介绍。
2)基于定义的传输方法
在基于定义的传输方法中,根据时域中预定义的传输网络特性和O-RU延迟特性来确定O-DU的发送窗和接收窗。为使这种方法生效,下表中定义的时域中每个O-RU的延迟特性应可用于O-DU。O-DU可以调整其发送窗和接收窗以适应O-RU延迟特性(如果O-DU具有这个能力)。可以基于O-DU的设计来限制O-DU发送窗和接收窗的调整范围。


上表列出了O-RU和O-DU的上下行延迟配置,其中O-RU延迟配置在前面均有介绍。O-DU延迟配置包括:
DL:![]() ,O-DU发送窗最早开始位置
,O-DU发送窗最早开始位置
![]() ,O-DU最大发送窗
,O-DU最大发送窗
UL:![]() ,O-DU接收窗的最晚结束位置
,O-DU接收窗的最晚结束位置
![]() ,O-DU最大接收窗
,O-DU最大接收窗
关于如何获得O-RU参数的详细解释,参考M平面规范。
O-RU可选择基于O-DU延迟配置和网络延迟(T12_min和T34_min)来调整其延迟配置信息,特别是对于UL。如果支持此选项,则O-DU应将其延迟配置以及T12_min提供给O-RU。该信息的交换应使用与O-RU延迟配置交换相同的方法。使用此选项,O-RU在发送其延迟配置到O-DU之前,首先接收到O-DU延迟配置。O-DU不知道O-RU的延迟配置已经被修改。与不使用此选项一样,O-DU只是简单的使用O-RU提供的延迟配置。
前面说过,O-RU的延迟特性可以基于空口属性而变化。为了确保互用性,ORAN支持的空口属性(可作为支持不同延迟特性的基础)限于:
- 信道带宽
- 子载波间隔(SCS)
应用于上述属性组合的一组延迟特性称为延迟配置。对于上述属性中O-RU支持的每个组合,延迟配置应该是一致的。注:上述属性的多个组合可以利用相同的O-RU延迟配置。例如,在支持多小区的O-RU中,每个小区的信道带宽可能是不同的,不需要为每个带宽提供单独的延迟配置,而是保证延迟配置满足O-RU支持的全部带宽即可。这些延迟配置是特定于O-RU的,不在ORAN规范的范围内。
当计算时域中O-DU的发送窗和接收窗时,O-DU必须根据O-RU在特定网络配置中使用的空口属性(如15kHz SCS或30kHz SCS),使用适合于每个O-RU的延迟配置。前面提到过,O-DU设计可能无法调整其发送/延迟窗口以满足所需的发送窗或接收窗。根据表4.3.3-3所示的设计,O-RU和O-DU可能具有多个延迟配置。也就是说,为使用不同空口属性的O-RU计算O-RU延迟参数,并根据计算后的O-RU延迟参数来计算O-DU延时配置。
使用为时域中每个O-RU的相应配置指定的延迟参数,可以按照下表的规定确定用于时域的UL和DL O-RU参数。对于这种方法,传输延迟参数是恒定的,并作为网络的一部分进行规定。

然后,使用下面两个表中定义的延迟关系来确定O-DU发送延迟参数和接收延迟参数。


最后,应用下表中定义的O-DU UL和DL限制条件,以确保可以支持计算后的时间窗。

3)基于测量的传输方法
在基于测量的传输方法中,基于上一节(基于定义的传输方法)定义的O-RU延迟特性,以及所有O-DU端口和O-RU端口之间测量的传输延迟,来确定时域中O-DU的发送窗和接收窗。O-DU应测量所有O-RU/O-DU物理前传网络接口端口对在时域中的传输延迟,并调整其发送窗和接收窗,以适应测量的传输延迟特性。
ORAN指定使用eCPRI规范中定义的单向延迟测量消息。使用eCPRI方法的好处有:
- 通过使用单个处理元素(参考M平面规范7.5节关于处理元素的定义)和用于测量的相关C/U平面端点地址来实现C平面和U平面之间的测量一致性。
- eCPRI单向延迟测量允许改变数据包大小以更好地模拟真实流量。
- eCPRI方法允许T12和T34分别测量。
注:因为没有其他特定的传输机制支持单向延迟测量,所以应使用eCPRI单向延迟协议进行延迟测量——即使RoE也被用做C平面和U平面传输机制,也是如此。

根据下面的图4.3.3-1(T12)和图4.3.3-2(T34),O-DU是测量T12和T34(可选)的发起方。
eCPRI规范定义了测量单向延迟的两种方法,1步方法和2步方法。使用1步方法,Request消息的发送方将在请求中包含![]() 和
和![]() 的值。使用2步方法,这些值将包含在Follow-Up消息中。有关该流程的详细信息,可参考eCPRI规范。
的值。使用2步方法,这些值将包含在Follow-Up消息中。有关该流程的详细信息,可参考eCPRI规范。
对于T34测量,使用1步方法或2步方法由M平面O-RU能力参数one-step-t34-supported和two-step-t34-supported控制。当O-RU支持基于测量的传输方法(eCPRI Msg 5)时,O-RU需要支持至少一种测量T34的方法。当O-RU在能力报告中报告这两个参数时,O-RU应同时支持T12测量的1步方法和2步方法。如果O-DU将发起T34测量,则O-DU应同时支持T34测量的1步方法和2步方法。当O-RU在能力报告中没有报告这两个参数,但是O-RU支持基于测量的传输方法时,O-DU可以在执行T12或T34测量时,通过使用1步方法或2步方法探测O-RU的能力。

上图说明了eCPRI单向延迟T12测量过程,在1步方法中,包括O-DU发送的Request消息,以及O-RU回复的Response消息。在2步方法中,包括O-DU发送的Request消息和Follow_Up消息,以及O-RU回复的Response消息。
![]() 表示在O-DU处的传输时间戳,
表示在O-DU处的传输时间戳,![]() 是一个补偿值,表示从
是一个补偿值,表示从![]() 到数据包发出的实际时间。
到数据包发出的实际时间。![]() 表示在O-RU处的接收时间戳,
表示在O-RU处的接收时间戳,![]() 是一个补偿值,表示从实际接收数据包的时间到
是一个补偿值,表示从实际接收数据包的时间到![]() 的时间差。
的时间差。![]() = (
= (![]() -
- ![]() ) – (
) – (![]() +
+ ![]() )表示数据包从O-DU发出的实际时间,到O-RU接收的实际时间的时间差。2步方法与1步方法的区别在于,O-RU在接收Request消息时并不知道
)表示数据包从O-DU发出的实际时间,到O-RU接收的实际时间的时间差。2步方法与1步方法的区别在于,O-RU在接收Request消息时并不知道![]() 和
和![]() ,而是在Follow_Up消息中得到
,而是在Follow_Up消息中得到![]() 和
和![]() 。
。
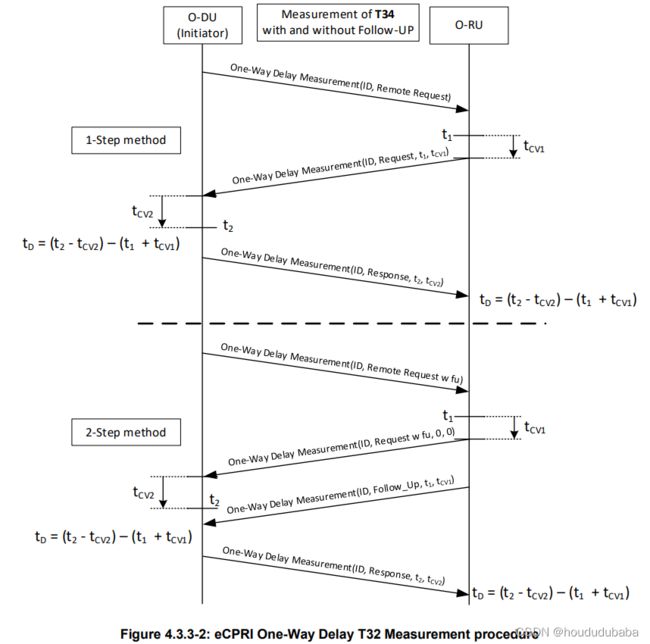
上图说明了eCPRI单向延迟T34测量过程,在1步方法中,包括O-DU发送的Remote Request消息,触发O-RU发送的Request消息,以及O-DU回复的Response消息。在2步方法中,包括O-DU发送的Remote Request消息,触发O-RU发送的Request消息和Follow_Up消息,以及O-DU回复的Response消息。参数值的说明与T12测量过程类似,区别在于Request消息由O-RU发出,并由O-DU回复Response消息。注:发起方仍然是O-DU(通过Remote Request消息)。
![]() 和
和![]() 是特定于实现的补偿值,O-DU和O-RU可以使用这两个值来考虑已知的时间戳处理延迟。
是特定于实现的补偿值,O-DU和O-RU可以使用这两个值来考虑已知的时间戳处理延迟。
注:当测量单向延迟时,目标是确定最小传输延迟。由于PDV(路径延迟值)的存在,任何单独的数据包在网络中都可能经历不同的延迟,因此,需要执行多次测量。由于期望的值是最小值(T12_min或T34_min),因此,使用各种测量中的最小值来估计最小传输延迟。O-DU可以使用估计的T12_min的值来作为T34_min的值,即认为上下行传输的最小延迟相同。当然,O-DU也可以选择为T34_min执行单独的测量。
传输延迟没有理论上限。最大值是基于测量的最小值加上允许的最大传输变化值(PDVmax)来确定的,其中PDVmax是作为传输网络的SLA的一部分定义的。
O-DU必须测量时域内每个O-DU/O-RU端口对的相应延迟。然后,使用每个端口对的最小延迟,以提供用于表4.3.2-2(DL延迟关系)和表Table 4.3.2-3(UL延迟关系)中规定的延迟关系中的传输参数。产生的延迟配置应满足表4.3.3-1中定义的O-DU限制条件。
为了正确评估定时,必须包括传输延迟,测量应该在发送C平面和U平面数据之前执行。执行测量所使用的数据包应与U平面数据包具有相同的L2 Cos Priority或L3 DSCP Code,以确保该测量准确反映U平面传输时延。如果需要,此测量还可以周期性操作,以验证延迟。
注:在接收窗监测的介绍中,流量统计也可以被用于错误检测。如果检测到错误,则可能有必要重新测量延迟,并基于新的测量结果更新O-DU和O-RU的定时。
4)具有动态定时提前的O-DU的时延类别
作为在特定传输网络用例中选择设备的辅助工具,ORAN O-DU和O-RU基于延迟能力被分类。设备被分类为类别【AAAA-ZZ】和子类别【.00-.1000】。该类别可用于确定设备可支持的最大T12max和T34max。
类别按以下公式确定:
 ≥ T12max + T2a_min_up
≥ T12max + T2a_min_up- ≥ T34max + Ta3_max_up
根据定义,![]() 是O-DU可以开始传输的最早时间。这就使得O-DU能够保证完成传输的最早时间是
是O-DU可以开始传输的最早时间。这就使得O-DU能够保证完成传输的最早时间是![]() -
- ![]() 。即O-DU可以开始传输的最早时间,减去O-DU的最大发送窗。其结果是:
。即O-DU可以开始传输的最早时间,减去O-DU的最大发送窗。其结果是:
- - - T2a_min_up ≥ T12max
根据下图可以简单理解为,如果以T2amin为O-RU最晚接收数据的时间点,为保证O-RU有足够的处理时间,应保证所有数据在T2amin之前传输完成。O-DU所有数据保证在![]() -
- ![]() 之前发送完成,最后发出的数据经过T12max的传输时间,仍然可以在T2amin处到达O-RU。所以可以理解为
之前发送完成,最后发出的数据经过T12max的传输时间,仍然可以在T2amin处到达O-RU。所以可以理解为
- - - T12max ≥ T2a_min_up,O-DU需要保证足够早。
同理,对于上行,![]() 是O-DU可能接收任何来自O-RU的数据包的最晚时间。因此
是O-DU可能接收任何来自O-RU的数据包的最晚时间。因此
 - Ta3_max_up ≥ T34max
- Ta3_max_up ≥ T34max
这里仍然应该根据O-RU的最晚发送时间Ta3_max_up计算,加上最大传输时间T34max,所以O-DU可能接收数据包的最晚时间为![]() 。因此
。因此
- ≥ T34max + Ta3_max_up,O-DU需要保证足够晚。

使用上述不等式,O-DU和O-RU可以基于以下约束被分配类别:

O-DU一列表示O-DU的下行最晚发送时间,以及上行最晚接收时间。
O-RU一列表示O-RU的下行最晚接收时间,以及上行最晚发送时间。
Transport一列表示根据O-RU和O-DU的最晚发送/接收时间分别计算出的上下行最大传输时间。
注:可以支持的最大范围基于上表中T12_max和T34_max的最小值。对于每个O-DU和O-RU,要求对UL和DL单独分类。因此,应为每个O-DU和O-RU的配对评估UL类别配对(AX)和DL类别配对(BY)。由相应配对(AX/BY)代表的最小距离(T12_max/T34_max)标识该O-DU和O-RU配对可以支持的最大传输延迟。
对于上表中定义的特性,每个端点都有一个特定的值。为了对端点进行分类,基于最大传输特性所在的范围对端点进行分组。分类标识意味着端点的最大传输特性介于类别的最大值和最小值之间。
由于类别标识,即端点支持的最大延迟,落在该类别范围内的某个位置,产生的类别配对(AX)为该组合定义了一个T12_max/T34_max的范围。这个范围可被用于识别该组合可以支持最大T12_max/T34_max和最小T12_max/T34_max。类别配对确定了该组合可支持的最大范围的最好和最坏情况。具有给定类别组合的特定O-DU/O-RU所支持的实际最大范围,将落在可支持的最大范围的最好和最坏情况之间的某个地方。也就是说,对于一个给定的类别A O-DU和类别X O-RU,该配对支持的T12_max/T34_max定义为:
- Latency_minAX ≤ (T12_max = T34_max) ≤ Latency_maxAX
此外,配对组合可以映射到支持的用例。ORAN协议附录B.2包括了类别定义,Latency_min,Latency_max和用例表。
注:类别仅用于确定最大可能范围(T12_max/T34_max)的值。对于一个给定用例,为了能够有效识别设备,也需要能够识别T12_min/T34_min的值。这可以用变化来定义,其中这里的变化表示T12_min/T34_min分别相对于T12_max/T34_max降低了多少。即:
- DL Variation = T12_max – T12_min
- UL Variation = T34_max – T34_min
需要额外的分类级别,以解决给定的设备类型配对可支持的传输延迟变化(如,T12_max – T12_min)。这通过使用子类别的方式解决。
注:可支持的总变化,是在接收方处的接收窗和传输变化的组合。然而,接收窗通常比传输变化大得多。
每个端点都被分配一个UL类别和一个DL类别。O-DU DL子类别基于传输变化,O-DU UL子类别基于接收窗。而O-RU则刚好相反,O-RU DL子类别基于接收窗,O-RU UL子类别基于传输变化。
因此,基于端点在给定传输方向(UL/DL)上的角色来定义子类别。
DL变化(Tvariation_DL)按下图定义:

如果所示,O-DU的发送时间跨度为![]() ,即O-DU可以在
,即O-DU可以在![]() 时间内发送完全部数据,但是在O_RU处的接收时间跨度为T2amax - T2amin,接收时间大于发送时间的部分也就是Tvariation_DL。
时间内发送完全部数据,但是在O_RU处的接收时间跨度为T2amax - T2amin,接收时间大于发送时间的部分也就是Tvariation_DL。
- Tvariation_DL ≤ T2a_max_up – T2a_min_up –
DL传输变化应满足上述条件,否则,O-DU发送的部分数据将会落在O-RU的接收窗外。注:T2amin对应于下行U平面的T2a_min_up。
UL变化(Tvariation_UL)按下图定义:
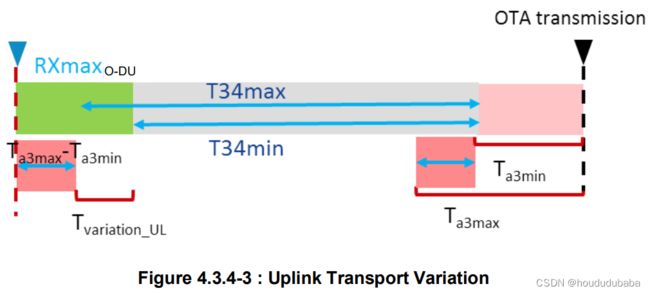
如图所示,O-RU的发送时间跨度为Ta3max - Ta3min,即O-RU可以在Ta3max - Ta3min时间内发送完全部数据,但是在O-DU处的接收时间跨度为![]() ,接收时间大于发送时间的部分也就是Tvariation_UL。
,接收时间大于发送时间的部分也就是Tvariation_UL。
- Tvariation_UL ≤ – (Ta3_max – Ta3_min)
UL传输变化应满足上述条件,否则,O-RU发送的部分数据将会落在O-DU的接收窗外。注:Ta3min对应于上行U平面的Ta3_min。
图中T34max的位置也可以向左平移,看做从Ta3max到![]() 左边界的距离。
左边界的距离。
使用各自的限制条件,传输变化可以基于O-DU和O-RU延迟特性定义如下:

O-DU一列表示O-DU的下行发送时间跨度,以及上行接收时间跨度。
O-RU一列表示O-RU的下行接收时间跨度,以及上行发送时间跨度。个人认为,对于UL,应使用Ta3_max - Ta3_min,而不是单独使用Ta3_max。
Transport一列表示根据O-RU和O-DU的发送/接收时间跨度分别计算出的上下行传输变化。个人认为,对于UL,括号中应使用Ta3_max - Ta3_min,而不是Ta3_max_up - Ta3_min_up。
使用端点特征定义每个方向的子类别。与类别相似,子类别指示端点具有落在指定子类别范围内的某个变化特征。由于传输变化和接收窗预计具有不同的范围,因此创建了单独的表。然而,由于子类别是数字【.####】,为了简化,以类似的方式分配这些值。####的值以10μs为单位,表示给定端点的属性。
例如,如果一个类别为X的O-RU,其T2a_min – T2a_max = 163 µsec,该O-RU的子类别应为【.16】。该O-RU的全部类别为X.16(注:这里的“.”是分隔符,不是小数点)。通过这种方法,接收方的子类别和发送方的子类别可直接用于确定两个方向上的动态范围:
- TX子类别:.06,即发送范围60μs
- RX子类别:.16,即接收范围160μs
产生的Tvariability = 16 * 10 - 6 * 10 = 100 µsec,即接收时间跨度与发送时间跨度的差值,表示传输过程中的传输变化。注:这提供了一个方向上支持的最大动态范围的下限。UL和DL Tvariability的最小值用于确定该组合的最大动态范围,例如,可以支持的T12_max和T12_min之间的最大差值。
附录B.3包含了子类别定义,以及产生的组合动态范围用例表。
使用动态定时提前,由于O-DU可以基于测量的T12_max设置其最早传输时间,无论T12_max如何,都可以使用全部范围的传输变化。例如,如果O-DU/O-RU组合具有100usec的传输变化,并且最大范围T12_max为250usec,则该组合可以支持测量的T12_max (≤ 250 usec),以及T12_min (T12_max – 100 usec)。因此,如果测量的T12_max为200usec,该组合可以支持T12_max为200usec,以及T12_min为100usec。
5)具有固定定时提前的O-DU的时延类别
相同的类别概念适用于支持固定发送窗/接收窗的O-DU。最早的发送窗和最晚的接收窗定时定义了O-DU可以支持的最大范围。O-DU的![]() 等于最早固定发送窗的T1a_max_up,同理,
等于最早固定发送窗的T1a_max_up,同理,![]() 等于最晚固定接收窗的Ta4_max。然后基于这些值分配O-DU类别。
等于最晚固定接收窗的Ta4_max。然后基于这些值分配O-DU类别。
但是,固定的发送窗和接收窗确实会影响可变性。固定的发送时间导致发包早于到达实际的T12_max(T12_max的值是测量的,或者有服务提供方配置)需要的时间。
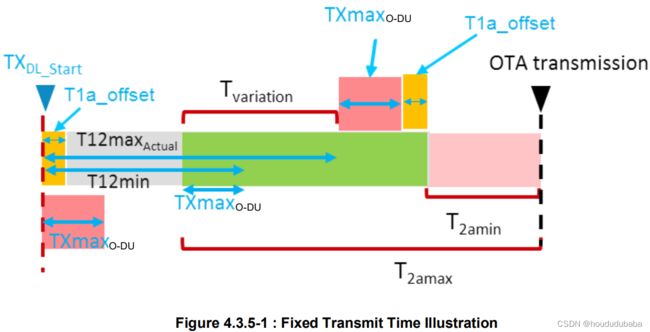
注:由于![]() 比T12_max所需的时间早T1a_offset,所以最晚的数据包至少在T2a_min_up之前T1a_ offset到达。其结果是,O-RU必须使用T1a_offset相当的接收buffer,这意味着O-RU需要额外的buffer来补偿T1a_ offset。由于
比T12_max所需的时间早T1a_offset,所以最晚的数据包至少在T2a_min_up之前T1a_ offset到达。其结果是,O-RU必须使用T1a_offset相当的接收buffer,这意味着O-RU需要额外的buffer来补偿T1a_ offset。由于![]() 是固定的,T12min也是固定的:
是固定的,T12min也是固定的:
- T12min =
 – (T2a_max_up – )
– (T2a_max_up – )
即O-RU最早接收数据的时间,与O-DU最晚发送数据的时间的时间差。
由于T12min不受影响,因此产生的Tvariation减少了T1a_offset。为了支持T12min,O-RU需要提供T1a_offset+T12max–T12min+![]() 的接收时间跨度,即,(固定偏移T1a_offset)+(传输变化T12max - T12min)+(O-DU发送时间跨度)。
的接收时间跨度,即,(固定偏移T1a_offset)+(传输变化T12max - T12min)+(O-DU发送时间跨度)。
还有一点需要注意,当T12_max + T2a_min_up = ![]() (即,最大范围,最大传输时间 + O-RU最晚接收时间 = O-DU最早发送时间)时,则T1a_offset = 0。但是,随着实际T12_max的减小,T1a_offset消耗的接收buffer的数量将会相应增加。
(即,最大范围,最大传输时间 + O-RU最晚接收时间 = O-DU最早发送时间)时,则T1a_offset = 0。但是,随着实际T12_max的减小,T1a_offset消耗的接收buffer的数量将会相应增加。
注:这也同样应用于UL。T34_min是相对于组合的T34_ max定义的,而不是相对于测量的T34_max。
6)无延迟管理的U平面数据流
尽管大多数U平面数据必须满足上面所述的延迟约束条件,但也存在某些类型的U平面数据流,其接收窗不适用这些约束条件。不将发送窗/接收窗约束应用到这样的数据,允许扩展前传接口上的数据传输,以减少接口所需的峰值带宽。
下图中,使用SRS来举例说明非延迟管理的U平面数据流。

在示例中,在空口上S slot中接收到大量的SRS数据。通过允许SRS数据在正常传输窗以外从O-RU传输到O-DU,并且允许其使用其他未使用的前传接口带宽,可大大降低所需的峰值前传带宽需求。
非延迟管理U平面数据流必须与延迟管理U平面数据流分开标识。在数据流标识一节中描述了使用eAxC ID标识U平面数据流,eAxC被用于指示延迟管理和非延迟管理数据流,例如,一些eAxC或Pcid指示的数据包可能承载延迟管理的U平面数据流,同时另一些eAxC或Pcid指示的数据包可能承载非延迟管理的U平面数据流。非延迟管理U平面数据流可以与延迟管理U平面数据流使用不同的eAxC ID。在eAxC ID内部,在相同的方向上(DL/UL),为非延迟管理U平面数据流和延迟管理U平面数据流分配了不同的RU_Port_ID。不要求用于UL非延迟管理U平面数据流的RU_Port_ID与用于DL非延迟管理U平面数据流的RU_Port_ID相同。
发送方可以发送非延迟管理的数据流,而不必考虑相应空口symbol的发送窗。同理,接收方不会丢弃在相应空口symbol的正常接收窗以外接收到的非延迟管理数据流。然而,空口symbol时间仍然包含在U平面数据包中(在application header中)以供参考。
注:被延迟管理的数据流与被非延迟管理的数据流(在应用程序内部进行管理)与可能被配置的任何传输优先级无关。
参考 《O-RAN-WG4.CUS.0-v08.00.pdf》