蜣螂优化(DBO)算法附MATLAB代码
目录
一、蜣螂优化(DBO)算法灵感来源
二、蜣螂优化(DBO)算法设计
三、蜣螂优化(DBO)算法MATLAB部分代码
四、运行结果
蜣螂优化(Dung Beetle Optimizer, DBO)算法是2022年11月27日提出的,大家可以算算到今天才提出多久。它是由东华大学的沈波教授团队提出的一种全新的群智能优化算法。或许大家对这个团队不是很了解,但相信大家对麻雀搜索算法一定不陌生,著名的SSA就是由这个团队提出。基于屎壳郎的滚球、跳舞、觅食、偷窃和繁殖行为,提出了一种基于种群的屎壳郎优化算法(DBO)。新提出的DBO算法兼顾了全局探索和局部开发,具有收敛速度快、解精度高的特点。
在本文中,详细讨论了一种新的基于si的优化技术——DBO算法,包括以下两个方面:灵感和数学模型。
一、蜣螂优化(DBO)算法灵感来源
众所周知,屎壳郎是自然界中一种常见的昆虫,以动物的粪便为食。请注意,蜣螂在世界上大部分地区都有发现,它们在自然界中扮演着分解者的角色,这意味着它们在生态系统中至关重要。研究表明,蜣螂有一个有趣的习惯,就是把粪便揉成一个球,然后把它滚出去,如图1所示。值得一提的是,屎壳郎的目的是为了尽可能快速有效地移动它们的粪球,这可以防止它们与其他蜣螂竞争。
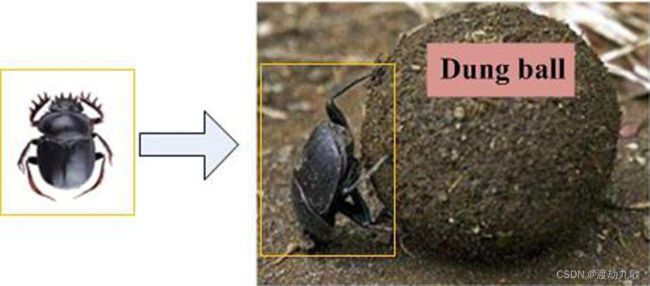 图1
图1
如图1所示,一只屎壳虫正在向后滚一个比自己还大的粪球。另一方面,屎壳郎有一种奇妙的行为,它可以利用天体的线索(尤其是太阳、月亮和偏振光)来导航,使粪球沿直线滚动。然而,如果根本没有光源(即完全黑暗),蜣螂的路径就不再是笔直的,而是弯曲的,有时甚至有点圆。注意,许多自然因素(如风和不平整的地面)会导致蜣螂偏离原来的方向。此外,屎壳郎在滚动的过程中很可能会遇到障碍物,无法前进。对此,蜣螂通常会爬到粪球上跳舞(包括一系列的旋转和停顿),这决定了它们的运动方向.
从蜣螂的生活方式中观察到的另一个有趣的行为是,获得的粪球有以下两个主要目的:1)一些粪球用来产卵和抚养下一代,2)其余的用作食物。具体来说,蜣螂把粪球埋起来,雌性蜣螂在这些粪球里产卵。需要注意的是,粪球不仅是幼虫发育的场所,也为幼虫提供了生命所必需的食物。因此,粪球对屎壳郎的生存起着不可替代的作用。
一种新的SI优化算法——DBO技术,主要是受到蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发。
二、蜣螂优化(DBO)算法设计
根据上面的讨论,我们知道蜣螂在滚动过程中需要通过天体线索来导航,以保持粪球在一条直线上滚动。为了模拟滚球行为,蜣螂需要在整个搜索空间中沿着给定的方向移动。屎壳郎的飞行轨迹如图2所示。在这张图中,我们可以看到蜣螂利用太阳来导航,其中红色箭头表示滚动方向。在本文中,我们假设光源的强度也会影响蜣螂的路径。在滚动过程中,滚球蜣螂的位置被更新,可以表示为

式中, 表示当前迭代次数,
表示当前迭代次数,![]() 表示第i只蜣螂在第n次迭代时的位置信息,k∈(0,0.2]表示一个常数,该常数表示缺陷系数,b表示一个属于(0,1)的常数,
表示第i只蜣螂在第n次迭代时的位置信息,k∈(0,0.2]表示一个常数,该常数表示缺陷系数,b表示一个属于(0,1)的常数, 为自然系数,赋值为-1或1,
为自然系数,赋值为-1或1,![]() 表示全局最差位置,Δx用于模拟光强的变化。
表示全局最差位置,Δx用于模拟光强的变化。
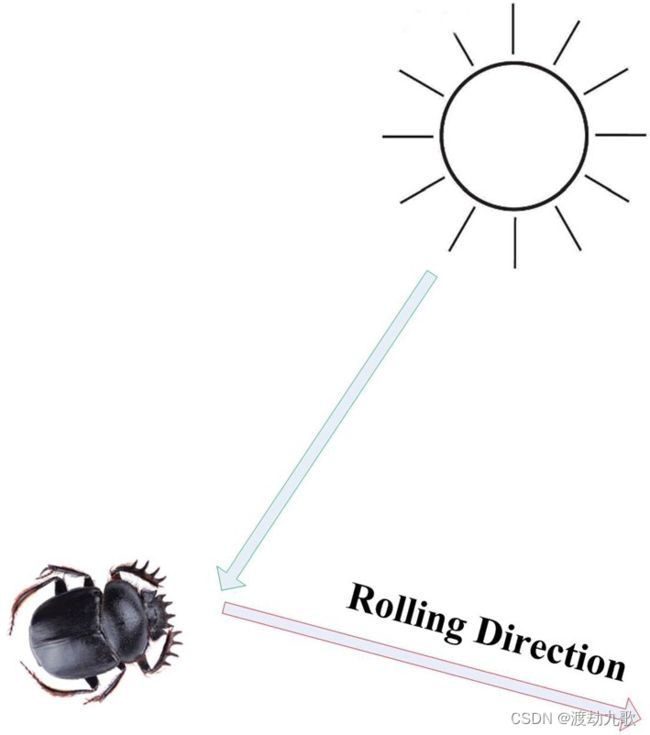 图2
图2
在(1)中,两个参数(k和b)选择合适的值至关重要。请注意훼意味着许多自然因素(如风和不平整的地面)会使蜣螂偏离原来的方向。其中= 1表示不偏离,=−1表示偏离原方向。为了模拟现实世界的复杂环境,本文采用概率法将设为1或-1(见算法1)。同样,Δx值越高,表示光源越弱。另外,k和b分别设为0.1和0.3。Δx可以促进滚球蜣螂具有以下两个优点:1)在优化过程中尽可能彻底地探索整个问题空间;2)追求更强的搜索性能,减少陷入局部最优的可能性。因此,![]() 更适合控制Δx的值来扩展搜索范围。
更适合控制Δx的值来扩展搜索范围。
当屎壳郎遇到障碍物无法前进时,它需要通过跳舞来重新定位自己,目的是获得一条新的路线。值得注意的是,舞蹈行为在滚球的蜣螂中起着重要作用。图2屎壳郎飞行轨迹的概念模型。
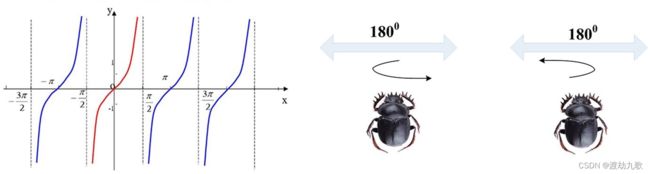 图3
图3
为了模拟舞蹈行为,我们使用正切函数来获得新的滚动方向。需要说明的是,我们只需要考虑在区间![]() 上定义的切函数的值,如图3所示。一旦蜣螂成功地确定了一个新的方向,它应该继续向后滚动球。因此,将滚球蜣螂的位置更新定义如下:
上定义的切函数的值,如图3所示。一旦蜣螂成功地确定了一个新的方向,它应该继续向后滚动球。因此,将滚球蜣螂的位置更新定义如下:
![]()
式中 为属于
为属于![]() 的倾斜角。
的倾斜角。
式(2)中,∣xi (t)−xi (t−1)∣为第i只屎壳虫在第n次迭代时的位置与第t−1次迭代时的位置之差。因此,滚球蜣螂的位置更新与当前和历史信息密切相关,请注意,如果等于0、 /2或,则蜣螂的位置不会更新(参见算法2)。
/2或,则蜣螂的位置不会更新(参见算法2)。

在自然界中,蜣螂会把粪球滚到安全的地方并藏起来(见图4)。为了给它们的后代提供一个安全的环境,选择合适的产卵地点对蜣螂来说至关重要。受上述讨论的启发,提出了一种边界选择策略来模拟雌性蜣螂产卵的区域,其定义为

式中,![]() 表示当前局部最优位置,Lb∗和Ub∗分别表示产卵区域的下界和上界,
表示当前局部最优位置,Lb∗和Ub∗分别表示产卵区域的下界和上界,![]() 和
和![]() 表示最大迭代次数,Lb和Ub分别表示优化问题的下界和上界。
表示最大迭代次数,Lb和Ub分别表示优化问题的下界和上界。
如图5所示,当前局部最佳位置![]() 用一个大的棕色圆圈表示,而
用一个大的棕色圆圈表示,而![]() 周围的小黑色圆圈表示育雏球。请注意,每个育仔球都包含一枚屎壳虫卵(见图4)。此外,红色小圆圈代表边界的上下限。一旦确定了产卵区域,雌性蜣螂就会选择这个区域的卵球产卵。需要说明的是,对于DBO算法,每只雌性蜣螂在每次迭代中只产生一个卵。此外,由(3)可以清楚地看出,产卵区的边界范围是动态变化的,这主要是由R值决定的。因此,孵化球的位置在迭代过程中也是动态的,定义为
周围的小黑色圆圈表示育雏球。请注意,每个育仔球都包含一枚屎壳虫卵(见图4)。此外,红色小圆圈代表边界的上下限。一旦确定了产卵区域,雌性蜣螂就会选择这个区域的卵球产卵。需要说明的是,对于DBO算法,每只雌性蜣螂在每次迭代中只产生一个卵。此外,由(3)可以清楚地看出,产卵区的边界范围是动态变化的,这主要是由R值决定的。因此,孵化球的位置在迭代过程中也是动态的,定义为
![]()
式中,![]() 为第i个育雏球在第n次迭代时的位置信息,
为第i个育雏球在第n次迭代时的位置信息,![]() 和
和![]() 表示大小为1 × D的两个独立随机向量,D表示优化问题的维数。注意孵蛋球的位置被严格限制在一定范围内,即产卵区域(见算法3)。
表示大小为1 × D的两个独立随机向量,D表示优化问题的维数。注意孵蛋球的位置被严格限制在一定范围内,即产卵区域(见算法3)。

一些已经长大成人的屎壳郎会从地下钻出来寻找食物(见图6)。在本文中,我们称它们为小屎壳郎。此外,我们还需要建立最佳觅食区域来指导甲虫的觅食,并进行模拟这些屎壳郎在自然界的觅食过程。其中,最优觅食区域的边界定义为:

式中,![]() 表示全局最佳位置,Lb和Ub分别表示最优觅食区域的下界和上界,其他参数定义如(3)所示。因此,小屎壳郎的位置更新如下:
表示全局最佳位置,Lb和Ub分别表示最优觅食区域的下界和上界,其他参数定义如(3)所示。因此,小屎壳郎的位置更新如下:
![]()
式中,![]() 表示第i只小蜣螂在第n次迭代时的位置信息,
表示第i只小蜣螂在第n次迭代时的位置信息,![]() 表示服从正态分布的随机数,
表示服从正态分布的随机数,![]() 表示属于(0,1)的随机向量。
表示属于(0,1)的随机向量。
另一方面,有些屎壳郎,被称为小偷,会从其他屎壳郎身上偷粪球(见图7)。需要指出的是,这是自然界中很常见的现象。由(5)可知,![]() 是最优食物源。因此,我们可以假设周围的
是最优食物源。因此,我们可以假设周围的![]() 表示争夺食物的最佳地点。在迭代过程中,小偷的位置信息更新,可以描述为:
表示争夺食物的最佳地点。在迭代过程中,小偷的位置信息更新,可以描述为:
![]()
式中![]() 表示第i个贼在第n次迭代时的位置信息,g是大小为1 × D的随机向量,服从正态分布,S表示常数。
表示第i个贼在第n次迭代时的位置信息,g是大小为1 × D的随机向量,服从正态分布,S表示常数。
 图5
图5
 图7
图7
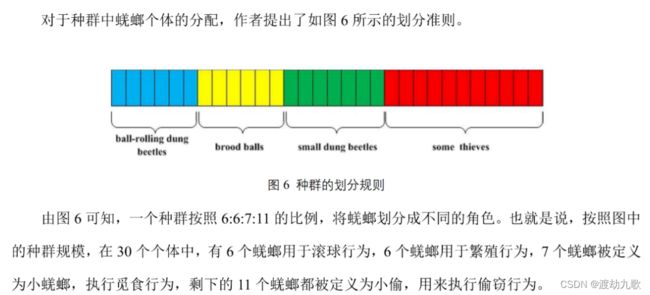
由于DBO算法将种群中的蜣螂划分成了四种不同的角色,因此它的计算流程会相对复杂一些,需要执行滚球、繁殖、觅食和偷窃四种算子。这里我用伪代码给出了它的计算流程:
 三、蜣螂优化(DBO)算法MATLAB部分代码
三、蜣螂优化(DBO)算法MATLAB部分代码
function [fMin , bestX, Convergence_curve ] = DBO(pop, M,c,d,dim,fobj)
P_percent = 0.2; % The population size of producers accounts for "P_percent" percent of the total population size
pNum = round( pop * P_percent ); % The population size of the producers
lb= c.*ones( 1,dim );
ub= d.*ones( 1,dim );
%Initialization
for i = 1 : pop
x( i, : ) = lb + (ub - lb) .* rand( 1, dim );
fit( i ) = fobj( x( i, : )) ;
end
pFit = fit;
pX=x;
XX=pX;
[fMin,bestI] = min(fit); % fMin denotes the global optimum fitness value
bestX = x(bestI,:); % bestX denotes the global optimum position corresponding to fMin
% Start updating the solutions.四、运行结果
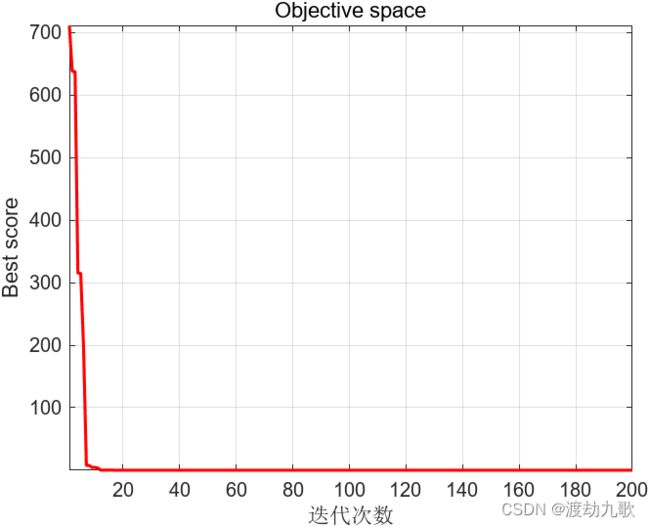
The best solution obtained by DBO is : 3.2411e-25 -3.4589e-25 1.3799e-24 1.3902e-24 4.566e-26 -2.7352e-25 4.8812e-25 -1.8461e-24 -1.545e-24 -5.3451e-28
The best optimal value of the objective funciton found by DBO is : 1.0172e-47
可以看出新提出的DBO算法兼顾了全局探索和局部开发,具有收敛速度快、解精度高的特点。