基于最大似然反射率的异构激光雷达强度标定方案(开源)
文章:Maximum Likelihood Remission Calibration for Groups of Heterogeneous Laser Scanners
作者:Bastian Steder Michael Ruhnke Rainer Kummerle Wolfram Burgard
编辑:点云PCL
代码:https://github.com/soytony/IntensityCalibration.git
欢迎各位加入知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。
公众号致力于点云处理,SLAM,三维视觉,高精地图等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系[email protected]。未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
本文介绍了一种用于异构激光雷达组的最大似然反射率标定方法。该标定方法为多个激光扫描仪的反射率值提供了一种解决方案,它考虑了距离、测量表面的入射角和扫描仪单元之间的依赖关系。我们的系统通过学习标定参数,并利用图优化方案,实现了不同测量之间的误差最小化,以确保所有涉及的扫描仪产生一致的反射值,无论观察相应表面的角度如何。该方法旨在通过估计激光雷达的反射率,提高激光雷达数据的质量和一致性。为了实现这一目标,我们首先通过对已知参考面进行扫描来建立反射率与激光雷达强度值之间的关系。然后,我们使用最大似然估计方法将这个对应关系推广到其他未知场景中的激光雷达数据上,从而获得未知场景中的激光雷达反射率的估计。在实验中使用了多个异构激光雷达组成的系统,并对其进行了测试和比较。实验结果表明,我们的方法可以有效地提高激光雷达的测量精度和一致性,与传统的标定方法相比,我们的方法不需要额外的标定目标或设备,仅通过利用已有的激光雷达数据即可获得准确的反射率估计。
主要贡献
本文的主要贡献包括:
1. 提出了一种无需特殊标定结构或设置的方法,通过利用已有的激光雷达数据,学习标定参数,从而提高反射特性的估计准确性和一致性。
2. 使用基于图形的最小二乘误差最小化技术,在无监督的情况下学习标定参数,直接考虑了测量范围、入射角和亮度之间的依赖关系。
3. 通过对比实验验证了该方法的有效性和准确性,证明了我们的系统可以更好地估计观察点的反射率,并提供一致的测量结果。
本文的方法为激光雷达的反射率标定提供了一种新的解决方案,无需特殊的标定结构或设置,可以提高反射特性的估计准确性和一致性,具有广泛的应用前景。
主要内容
该方法不依赖于任何特殊的标定结构或设置,而是利用由移动机器人上的一个或多个激光雷达捕获的一系列注册的三维点云数据。如果相同环境中的某一位置被不同的激光雷达以不同的视角和距离进行观测,目标是学习标定参数,使得应用于测量数据时,在该位置上获得一致的反射率测量结果。该系统利用基于图优化的最小二乘误差最小化技术来学习标定参数,以无监督的方式进行标定。该方法直接考虑到了测量范围、入射角和特定激光雷达的亮度之间的依赖关系。通过该方法,可以提高多个激光雷达的反射率值的一致性,并消除不同激光雷达在观测相同表面时的视角差异。通过对反射率值的标定,可以更准确地推断被观测结构的亮度和表面特性,从而增强激光雷达在感知环境中的应用能力。
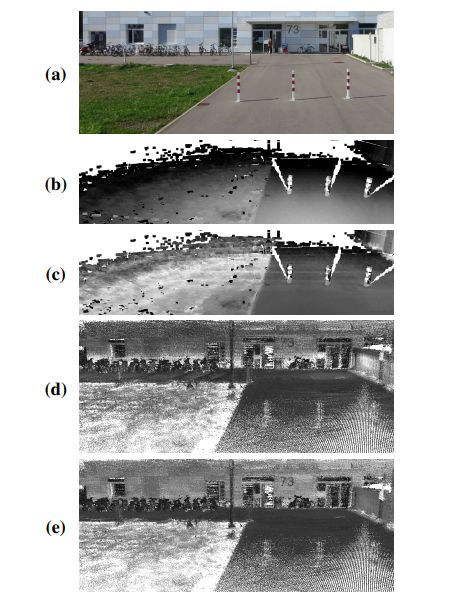
图1. 使用经过校准和未经校准的反射率值获得的示例场景、对应的扫描和地图:(a) 观测场景。(b) 来自单个可倾斜的Hokuyo UTM激光雷达的未经校准的三维扫描点云。由于距离更近和入射角更陡峭,底部中心的测量值更亮。(c) 上述扫描的经过校准的版本,道路现在显示连续的灰度值。(d) 使用三个不同的三维扫描仪(Velodyne HDL-32E、朝下的SICK LMS 151和可倾斜的Hokuyo UTM)组合捕获的未经校准的三维点云。结构不太清晰可见,并且连续表面上的反射率值不均匀。(e) 图(d)的经过校准的版本,显示更好的对比度和更均匀的灰度值
实验与分析
在实验中使用了两个不同的机器人平台。图4左侧显示了我们的机器人Obelix,它配备了多种激光雷达,包括一个向下朝向的SICK LMS 151,在行驶过程中累积3D点云数据,一个可倾斜的Hokuyo UTM和一个Velodyne HDL-32E(一个具有32个单独激光器的多波束3D激光雷达)。第二个机器人称为Viona(见图4右侧),它配备了一个Velodyne HDL-64E(一个具有64个单独激光器的多波束3D激光雷达)。实验中考虑的所有激光雷达均使用905纳米红外光。
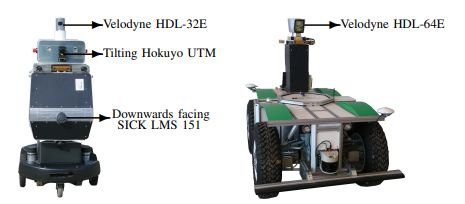
图4.左图:机器人"Obelix"配备了来自不同制造商的三种激光雷达类型,总共有34个独立的激光器,右图:机器人"Viona"配备了一个包含64个独立激光器的Velodyne激光雷达。
图6展示了我们的标定过程与真值的比较结果,请注意,标定结果在反射率值上可能存在一个常数缩放因子的差异。因此,我们总是对标定进行归一化,使学习数据集上的平均反射率为1.0。图6中的绘图已经适当调整,不会受到这种因子的影响,可以看到,我们的方法能够准确恢复标定函数,在数据集上的中位误差仅为0.009。
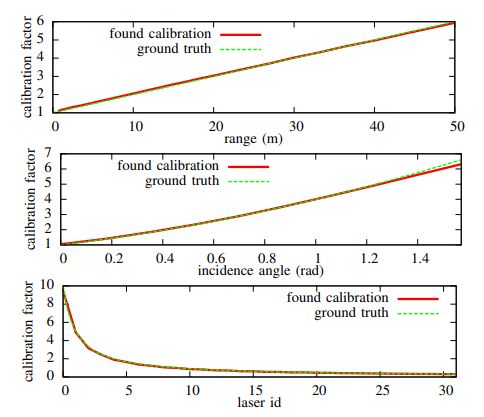
图6.这些图表可视化了模拟数据集中找到的标定参数和真值曲线,真值是方程式9中相应部分的倒数,因为这些因子的目的是消除影响。
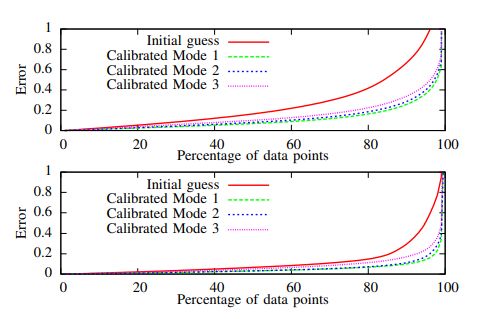
图7.该图表可视化了Obelix数据集(顶部)和Viona数据集(底部)上进行标定的不同模式的标定前后误差分布。

图8.这张图显示了我们收集Obelix数据集的区域的航拍图像(左侧),经过标定的反射率图(中间)和每个单元测量残差的剩余方差,其中较暗的值表示较低的误差(右侧)。像街道或建筑物墙壁这样的平坦均匀着色区域具有非常低的残差误差,而草坪等则仍具有较高的方差,这是由于非均匀的颜色和嘈杂的3D结构造成的。
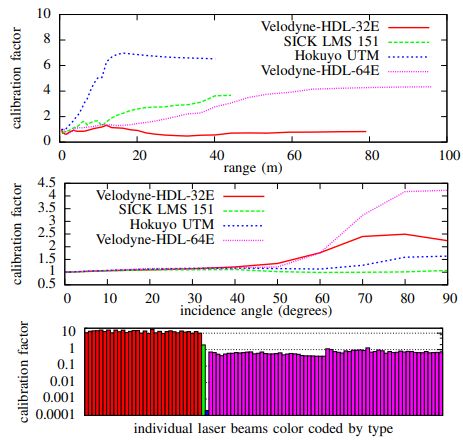
图9.这些图表可视化了我们使用的两个数据集的找到的标定参数。尽管模式3返回了最差的结果,但它更容易进行可视化。相比之下,显示98个单独的图表(每个单独的激光束一个图表)是不实际的。顶部的图表显示了每个激光类型的每个测距范围的标定因子,中间的图表显示了每个激光类型的每个入射角度的标定因子,底部的图表显示了每个单独激光的标定因子,颜色与上面的图表相同。
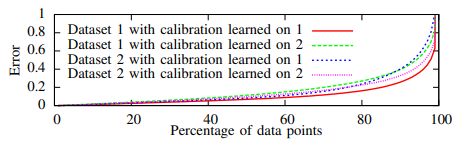
图10.两个不同数据集的标定,并相互应用后的误差分布。
总结
本文中提出了一种基于配准点云数据集的异构激光雷达反射率无监督标定的方法,我们的系统通过最小化落入同一3D单元格的测量值的平方误差,实现了不同激光器、测距和入射角度的测量值在反射率值上的最佳对应,我们进行了多个不同类型激光雷达的实验,结果表明经过我们系统的标定后,这些激光雷达可以一起使用,创建出环境反射率一致的点云地图。
更多详细内容后台发送“知识星球”加入知识星球查看更多。
资源
自动驾驶及定位相关分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
自动驾驶中基于光流的运动物体检测
基于语义分割的相机外参标定
综述:用于自动驾驶的全景鱼眼相机的理论模型和感知介绍
高速场景下自动驾驶车辆定位方法综述
Patchwork++:基于点云的快速、稳健的地面分割方法
PaGO-LOAM:基于地面优化的激光雷达里程计
多模态路沿检测与滤波方法
多个激光雷达同时校准、定位和建图的框架
动态的城市环境中杆状物的提取建图与长期定位
非重复型扫描激光雷达的运动畸变矫正
快速紧耦合的稀疏直接雷达-惯性-视觉里程计
基于相机和低分辨率激光雷达的三维车辆检测
用于三维点云语义分割的标注工具和城市数据集
ROS2入门之基本介绍
固态激光雷达和相机系统的自动标定
激光雷达+GPS+IMU+轮速计的传感器融合定位方案
基于稀疏语义视觉特征的道路场景的建图与定位
自动驾驶中基于激光雷达的车辆道路和人行道实时检测(代码开源)
用于三维点云语义分割的标注工具和城市数据集
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
TOF相机原理介绍
TOF飞行时间深度相机介绍
结构化PLP-SLAM:单目、RGB-D和双目相机使用点线面的高效稀疏建图与定位方案
开源又优化的F-LOAM方案:基于优化的SC-F-LOAM
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
基于鱼眼相机的SLAM方法介绍
3D视觉与点云学习星球:主要针对智能驾驶全栈相关技术,3D/2D视觉技术学习分享的知识星球,将持续进行干货技术分享,知识点总结,代码解惑,最新paper分享,解疑答惑等等。星球邀请各个领域有持续分享能力的大佬加入我们,对入门者进行技术指导,对提问者知无不答。同时,星球将联合各知名企业发布自动驾驶,机器视觉等相关招聘信息和内推机会,创造一个在学习和就业上能够相互分享,互帮互助的技术人才聚集群。
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享与合作方式:微信“cloudpoint9527”(备注:姓名+学校/公司+研究方向) 联系邮箱:[email protected]。
为分享的伙伴们点赞吧!