噪声参数估计相关
文章目录
- 噪声参数估计相关
-
-
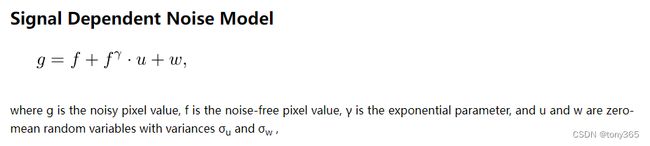
- 1. Estimation Of Signal Dependent Noise Parameters From A Single Image
- 2. Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data
- 3. Simplified noise model parameter estimation for signal-dependent noise
- 4. PoGaIN: Poisson-Gaussian Image Noise Modeling from Paired Samples
- 5. Image Noise Level Estimation by Principal Component Analysis
- 6. 论文
- 7. NERDS: A GENERAL FRAMEWORK TO TRAIN CAMERA DENOISERS FROM RAW-RGB NOISY IMAGE PARIS
-
- 7.1 常见的CNN去噪策略
- 7.2 原理
-
噪声参数估计相关
1是利用flat frame和 bias frame进行标定

2是通过图像估计
本文主要介绍2
1. Estimation Of Signal Dependent Noise Parameters From A Single Image
ICIP2013:http://www.ok.sc.e.titech.ac.jp/res/NLE/sd_nlevel.html
https://github.com/Joechann0831/LFSRBenchmark/blob/017609889cf8a9fe6227ccc5e28185b576fd5b74/RR/MATLAB/noise_level_estimation/NoiseLevel.m#L1
通过纹理强度筛选平坦区域。

纹理强度小于一定阈值的patch计算均值和方差。

同作者论文:http://www.ok.sc.e.titech.ac.jp/res/NLE/liu2014practical.pdf
2. Practical Poissonian-Gaussian noise modeling and fitting for single-image raw-data
code:https://webpages.tuni.fi/foi/sensornoise.html#ref_software
p文件是加密的matlab文件,因此并没有源代码
博客介绍:https://blog.csdn.net/qq_34901691/article/details/119304917
同一作者论文:Noise parameter mismatch in variance stabilization,
with an application to Poisson-Gaussian noise
estimation:https://webpages.tuni.fi/foi/papers/VSTmismatch_TIP_preprint_2014.pdf
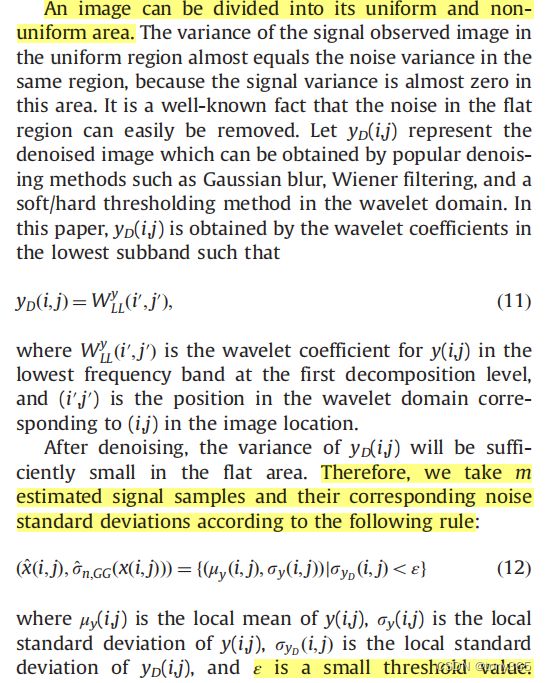
3. Simplified noise model parameter estimation for signal-dependent noise
code:https://github.com/muggin/noise-parameter-estimation
目的还是找到flat region.
首先通过高斯滤波或者小波的方法得到降噪后的图像,可以认为近似flat, 原文中使用的 第一次小波分解的 低频成分。
然后筛选出 降噪图像方差小于 一定阈值的 区域。然后计算原图 的均值和方差。
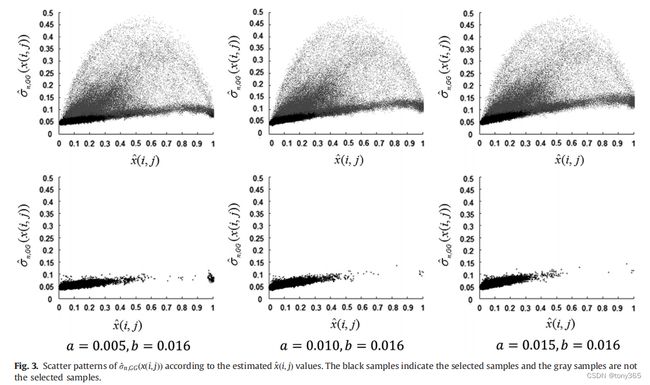
原论文解释:
上面是筛选前的均值和方差分布,
下面是筛选后的,可以看出呈现近似的线性关系。
通过线性回归可以得到 噪声参数。
一个筛选的示意图如下:
比较好的创新就是 通过降噪后的图像筛选。这样其实更靠谱,降噪后的flat region近似ground truth.
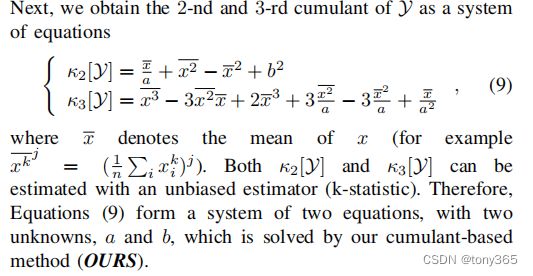
4. PoGaIN: Poisson-Gaussian Image Noise Modeling from Paired Samples
利用图像对 估计 噪声参数。
比较了4中方法,
1是FOI的经典方法
2是利用clean-noise pair的方差法
3是CNN训练
4是作者提出的方法,比2稍好,但是复杂。
通过cumulant等统计信息建立方程,求解。
5. Image Noise Level Estimation by Principal Component Analysis
和 Image Sensor Noise Parameter Estimation by Variance Stabilization and Normality Assessmen
code: http://physics.medma.uni-heidelberg.de/cms/projects/132-pcanle
code:https://github.com/LuisWohlers/NoiseReconstruction
6. 论文
1
Parameter Estimation of Poisson–Gaussian Signal-Dependent Noise from Single Image of CMOS/CCD Image Sensor Using Local Binary Cyclic Jumping:https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8705815/
2
Generalized signal-dependent noise model and
parameter estimation for natural images:
https://core.ac.uk/download/pdf/218145166.pdf
3
Parameter Estimation of Signal-Dependent Random Noise in CMOS/CCD Image Sensor Based on Numerical Characteristic of Mixed Poisson Noise Samples:
https://www.mdpi.com/1424-8220/18/7/2276/htm
4
Noise Parameter Estimation for Poisson Corrupted Images Using Variance Stabilization Transforms:
https://www.researchgate.net/publication/261605076_Noise_Parameter_Estimation_for_Poisson_Corrupted_Images_Using_Variance_Stabilization_Transforms
7. NERDS: A GENERAL FRAMEWORK TO TRAIN CAMERA DENOISERS FROM RAW-RGB NOISY IMAGE PARIS
7.1 常见的CNN去噪策略
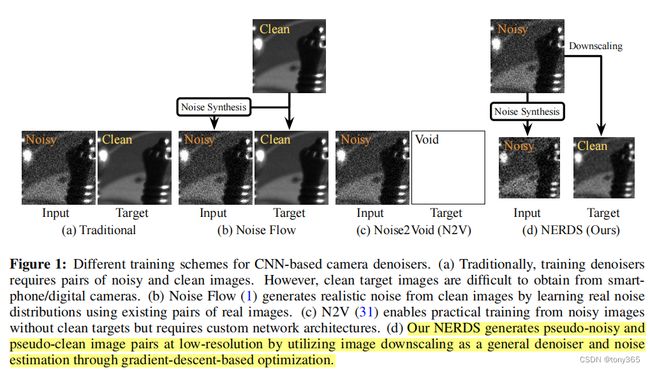
1)pair, 2)噪声模型合成噪声图,3) 无监督unpair, 和4)作者提出的利用down scale图近似ground truth
7.2 原理
1)利用重参数化技术噪声水平估计
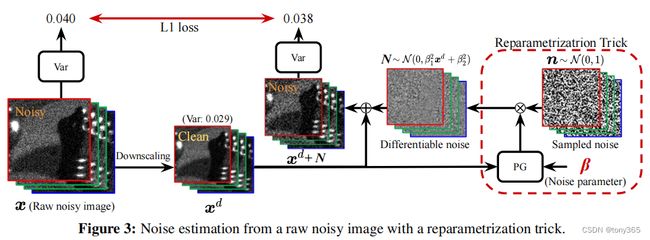
2)卷积网络学习raw2srgb的转换
损失函数是 估计 的 noisy image 与 ground truth的L1

3)denoiser的设计
