SLAM十四讲——ch3实践
ch3的实践及避坑
- 一、ch3的总体步骤
- 二、文件的执行
-
- 1. 实践:Eigen
- 2. 实践:Eigen几何模块
- 3. 可视化演示
- 出现的问题
一、ch3的总体步骤
- 确保已经安装Eigen库,Eigen库是一个C++开源线性代数库。
sudo apt-get install libeigen3-dev
说明: 它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能;想g2o\Sophus等上层软件库也会使用Eigen库。
- 在终端中进入ch3文件夹下,顺序执行以下命令进行编译。
mkdir build
cd build
cmake ..
//注意,j4还是其他主要看自己的电脑情况
make -j4
- 在build文件中执行。
二、文件的执行
1. 实践:Eigen
在build文件中进一步进入到useEigen中,然后执行 ./eigenMatrix,得到结果如下:
matrix 2x3 from 1 to 6:
1 2 3
4 5 6
print matrix 2x3:
1 2 3
4 5 6
[1,2,3;4,5,6]*[3,2,1]=10 28
[1,2,3;4,5,6]*[4,5,6]: 32 77
random matrix:
0.680375 0.59688 -0.329554
-0.211234 0.823295 0.536459
0.566198 -0.604897 -0.444451
transpose:
0.680375 -0.211234 0.566198
0.59688 0.823295 -0.604897
-0.329554 0.536459 -0.444451
sum: 1.61307
trace: 1.05922
times 10:
6.80375 5.9688 -3.29554
-2.11234 8.23295 5.36459
5.66198 -6.04897 -4.44451
inverse:
-0.198521 2.22739 2.8357
1.00605 -0.555135 -1.41603
-1.62213 3.59308 3.28973
det: 0.208598
Eigen values =
0.0242899
0.992154
1.80558
Eigen vectors =
-0.549013 -0.735943 0.396198
0.253452 -0.598296 -0.760134
-0.796459 0.316906 -0.514998
time of normal inverse is 0.14ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
time of Qr decomposition is 0.089ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
time of ldlt decomposition is 0.043ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
2. 实践:Eigen几何模块
(1)Eigen集合模块的数据演示
在build中进入 useGeometry,执行 ./eigenGeometry后,结果如下:
rotation matrix =
0.707 -0.707 0
0.707 0.707 0
0 0 1
(1,0,0) after rotation (by angle axis) = 0.707 0.707 0
(1,0,0) after rotation (by matrix) = 0.707 0.707 0
yaw pitch roll = 0.785 -0 0
Transform matrix =
0.707 -0.707 0 1
0.707 0.707 0 3
0 0 1 4
0 0 0 1
v tranformed = 1.71 3.71 4
quaternion from rotation vector = 0 0 0.383 0.924
quaternion from rotation matrix = 0 0 0.383 0.924
(1,0,0) after rotation = 0.707 0.707 0
should be equal to 0.707 0.707 0 0
(2)实际的坐标变化例子
在build中进入 examples,执行 ./coordinateTransform后,结果如下:
-0.0309731 0.73499 0.296108
3. 可视化演示
(1)显示运动轨迹
在build中进入 examples,执行 ./plotTrajectory后,结果如下:
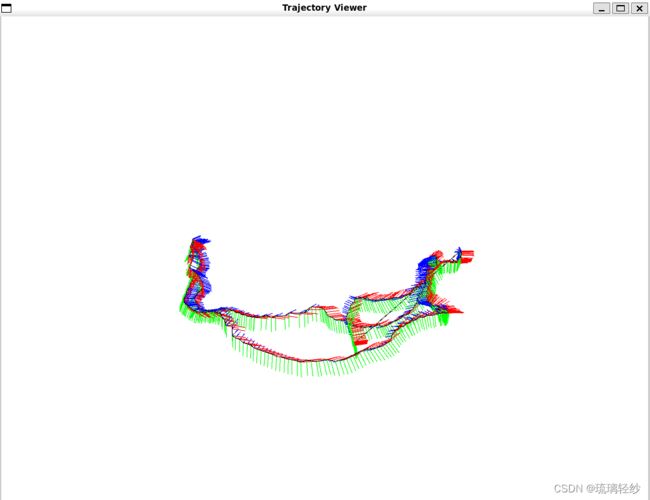
同时终端输出:
read total 620 pose entries
(2)Eigen集合模块的可视化演示
在build中进入 visualizeGeometry,执行 ./visualizeGeometry后,结果如下:

出现的问题
1.出现的为题:执行./plotTrajectory时出现下面错误
cannot find trajectory file at ./examples/trajectory.txt
解决办法:更改plotTrajectory.cpp文件,将第11行./examples/trajectory.txt改为:
// path to trajectory file
string trajectory_file = "/home/fighter/slam/slambook2/ch3/examples/trajectory.txt";
原因:主要是因为找不到文件导致,这里为了避免更多的问题和麻烦出现,建议直接改为绝对路径。