ROS小车研究笔记3/11/2023:多点导航及其源码实现
多点导航操作
打开导航launch文件
roslaunch turn_on_wheeltec_robot navigation.launch
rviz
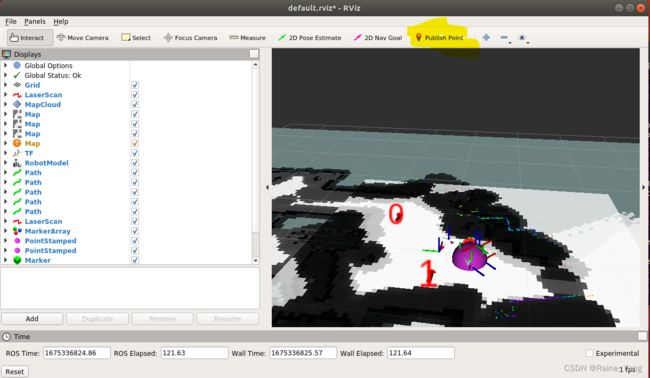
在rviz里,选择publish point在地图上点击标记目标点。在标记多个目标点后小车会按标记顺序依次在各个目标点中往返
多点导航对于话题MarkerArray。需要在rviz中使markerArray订阅小车发布的path_point话题
多点导航源码分析
在导航节点 turn_on_wheeltec_robot navigation.launch文件中,启动了如下节点用于多点导航
<!-- MarkerArray功能节点> -->
<node name='send_mark' pkg="turn_on_wheeltec_robot" type="send_mark.py">
</node>
找到turn_on_wheeltec_robot下的send_mark.py。该节点即为多点导航控制节点
1 主方法
def send_mark():
global markerArray, markerArray_number, count, index, try_again, mark_pub, goal_pub
markerArray = MarkerArray() #目标点标记数组
markerArray_number = MarkerArray() #目标点标记数组
count = 0
index = 0
try_again = 1
sendflagPublisher = rospy.Publisher('/send_flag', Int8, queue_size =1)
rospy.init_node('path_point_demo') #初始化节点
mark_pub = rospy.Publisher('/path_point', MarkerArray, queue_size = 100) #用于发布目标点标记
navGoal_sub = rospy.Subscriber('/send_mark_goal', PoseStamped, navGoal_callback) #订阅rviz内标记按下的位置
click_sub = rospy.Subscriber('/clicked_point', PointStamped, click_callback) #订阅rviz内标记按下的位置
goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size = 1) #用于发布目标点
send_flag=Int8()
send_flag.data=1
sendflagPublisher.publish(send_flag)
rospy.sleep(1.)
sendflagPublisher.publish(send_flag)
rospy.loginfo('a=%d',send_flag.data)
print("11111111111111111111111111")
goal_status_sub = rospy.Subscriber('/move_base/result', MoveBaseActionResult, pose_callback) #用于订阅是否到达目标点状态
while not rospy.is_shutdown():
key = getKey() #获取键值
if(key=='c'): #键值为c是清空目标点
count = 0
index = 0
try_again = 1
markerArray = MarkerArray()
marker = Marker()
marker.header.frame_id = 'map'
marker.type = marker.TEXT_VIEW_FACING
marker.action = marker.DELETEALL
marker.text = ''
markerArray.markers.append(marker)
for m in markerArray_number.markers:
m.action = marker.DELETEALL
mark_pub.publish(markerArray)
mark_pub.publish(markerArray_number)
markerArray = MarkerArray()
markerArray_number = MarkerArray()
elif (key == '\x03'): #ctrl+c退出
break
def breakkey():
fd = sys.stdin.fileno()
new_settings = termios.tcgetattr(fd)
new_settings[3]=new_settings[3] | termios.ECHO
termios.tcsetattr(fd, termios.TCSADRAIN, new_settings)
if __name__ == '__main__':
settings = termios.tcgetattr(sys.stdin) #获取键值初始化
rospy.on_shutdown(breakkey)#退出前执行键值初始化
send_mark()
对于创建的变量,markerArray是一个数组用于保存所有目标的。count为目标点总数,index为下一个要前往的目标点,try_again为在前往目标点失败后,在重新选择前往下一个目标点前尝试前往该目标点的次数。
后面定义了几个发布者和订阅者
mark_pub = rospy.Publisher(‘/path_point’, MarkerArray, queue_size = 100) #用于发布目标点标记
navGoal_sub = rospy.Subscriber(‘/send_mark_goal’, PoseStamped, navGoal_callback) #订阅rviz内标记按下的位置
click_sub = rospy.Subscriber(‘/clicked_point’, PointStamped, click_callback) #订阅rviz内标记按下的位置
goal_pub = rospy.Publisher(‘/move_base_simple/goal’, PoseStamped, queue_size = 1) #用于发布目标点
send_flag=Int8()
这里我们得到rviz里发布的clicked_point和send_mark_goal代表得到的目标点。并发布小车的目标点
click_sub的回调函数click_callback
#rviz内标记按下的回调函数,输入参数:按下的位置[x, y, z=0]
def click_callback(msg):
global index, count
print('Add a new target point '+str(count)+':')
print('x:'+str(msg.point.x)+
', y:'+str(msg.point.y)+
', z:0'+', w:1')
marker = Marker() #创建marker对象
marker.header.frame_id = 'map' #以哪一个TF坐标为原点
marker.type = marker.ARROW #一直面向屏幕的字符格式
marker.action = marker.ADD #添加marker
marker.scale.x = 0.2 #marker大小
marker.scale.y = 0.05 #marker大小
marker.scale.z = 0.05 #marker大小,对于字符只有z起作用
marker.color.a = 1 #字符透明度
marker.color.r = 1 #字符颜色R(红色)通道
marker.color.g = 0 #字符颜色G(绿色)通道
marker.color.b = 0 #字符颜色B(蓝色)通道
marker.pose.position.x = msg.point.x #字符位置
marker.pose.position.y = msg.point.y #字符位置
marker.pose.orientation.z = 0 #字符位置
marker.pose.orientation.w = 1 #字符位置
markerArray.markers.append(marker) #添加元素进数组
marker_number = Marker() #创建marker对象
marker_number.header.frame_id = 'map' #以哪一个TF坐标为原点
marker_number.type = marker_number.TEXT_VIEW_FACING #一直面向屏幕的字符格式
marker_number.action = marker_number.ADD #添加marker
marker_number.scale.x = 0.5 #marker大小
marker_number.scale.y = 0.5 #marker大小
marker_number.scale.z = 0.5 #marker大小,对于字符只有z起作用
marker_number.color.a = 1 #字符透明度
marker_number.color.r = 1 #字符颜色R(红色)通道
marker_number.color.g = 0 #字符颜色G(绿色)通道
marker_number.color.b = 0 #字符颜色B(蓝色)通道
marker_number.pose.position.x = msg.point.x #字符位置
marker_number.pose.position.y = msg.point.y #字符位置
marker_number.pose.position.z = 0.1 #字符位置
marker_number.pose.orientation.z = 0 #字符位置
marker_number.pose.orientation.w = 1 #字符位置
marker_number.text = str(count) #字符内容
markerArray_number.markers.append(marker_number) #添加元素进数组
#markers的id不能一样,否则rviz只会识别最后一个元素
id = 0
for m in markerArray.markers: #遍历marker分别给id赋值
m.id = id
id += 1
for m in markerArray_number.markers: #遍历marker分别给id赋值
m.id = id
id += 1
mark_pub.publish(markerArray) #发布markerArray,rviz订阅并进行可视化
mark_pub.publish(markerArray_number) #发布markerArray,rviz订阅并进行可视化
#第一次添加marker时直接发布目标点
if count == 0:
pose = PoseStamped() #创建目标点对象
pose.header.frame_id = 'map' #以哪一个TF坐标为原点
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = msg.point.x #目标点位置
pose.pose.position.y = msg.point.y #目标点位置
pose.pose.orientation.z = 0 #四元数,到达目标点后小车的方向,z=sin(angle/2)
pose.pose.orientation.w = 1 #四元数,到达目标点后小车的方向,w=cos(angle/2)
goal_pub.publish(pose)
index += 1 #下一次要发布的目标点序号
count += 1 #有几个目标点
click_callback实现了如下功能
1 在终端打出得到的目标点位置和编号
2 创建Marker对象(rviz上的标记点),并设置标记面向屏幕,大小,透明度,颜色,位置,方向
3 设置marker的id为标记的顺序值。默认情况下marker id都为0,这会导致当有多个id相同的marker时rviz只显示最后一个
4 发布markerArray,由rviz订阅以进行可视化
5 在第一次添加marker时会发布目标点消息,类型为PoseStamped。在之后会让count加一
疑点:这里我们创建了marker和marker_number,并对这两个对象进行了完全一样的操作,设置这一个完全相同的marker_number的目的是什么
navGoal_sub的回调函数pose_callback
#到达目标点成功或失败的回调函数,输入参数:[3:成功, 其它:失败](4:ABORTED)
def pose_callback(msg):
global try_again, index, try_again, index
if msg.status.status == 3 and count>0 : #成功到达任意目标点,前往下一目标点
try_again = 1 #允许再次尝试前往尚未抵达的该目标点
#count表示当前目标点计数,index表示已完成的目标点计数
if index == count: #当index等于count时,表示所有目标点完成,重新开始巡航
print ('Reach the target point '+str(index-1)+':')
print('x:'+str(markerArray.markers[index-1].pose.position.x)+
', y:'+str(markerArray.markers[index-1].pose.position.y)+
', z:'+str(markerArray.markers[index-1].pose.orientation.z)+
', w:'+str(markerArray.markers[index-1].pose.orientation.w))
if count > 1:
print('Complete instructions!') #只有一个目标点不算巡航
index = 0
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.z = markerArray.markers[index].pose.orientation.z
pose.pose.orientation.w = markerArray.markers[index].pose.orientation.w
goal_pub.publish(pose)
index += 1 #下一次要发布的目标点序号
elif index < count: #当index小于count时,表示还未完成所有目标点,目标巡航未完成
print ('Reach the target point '+str(index-1)+':')
print('x:'+str(markerArray.markers[index-1].pose.position.x)+
', y:'+str(markerArray.markers[index-1].pose.position.y)+
', z:'+str(markerArray.markers[index-1].pose.orientation.z)+
', w:'+str(markerArray.markers[index-1].pose.orientation.w))
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.z = markerArray.markers[index].pose.orientation.z
pose.pose.orientation.w = markerArray.markers[index].pose.orientation.w
goal_pub.publish(pose)
index += 1 #下一次要发布的目标点序号
elif count > 0: #未抵达设定的目标点
rospy.logwarn('Can not reach the target point '+str(index-1)+':'+'\r\n'+
'x:'+str(markerArray.markers[index-1].pose.position.x)+
', y:'+str(markerArray.markers[index-1].pose.position.y)+
', z:'+str(markerArray.markers[index-1].pose.orientation.z)+
', w:'+str(markerArray.markers[index-1].pose.orientation.w))
#如果未尝试过前往尚未抵达的目标点,则尝试前往尚未抵达的目标点
if try_again == 1:
rospy.logwarn('trying reach the target point '+str(index-1)+' again!'+'\r\n'+
'x:'+str(markerArray.markers[index-1].pose.position.x)+
', y:'+str(markerArray.markers[index-1].pose.position.y)+
', z:'+str(markerArray.markers[index-1].pose.orientation.z)+
', w:'+str(markerArray.markers[index-1].pose.orientation.w))
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index - 1].pose.position.x
pose.pose.position.y = markerArray.markers[index - 1].pose.position.y
pose.pose.orientation.z = markerArray.markers[index-1].pose.orientation.z
pose.pose.orientation.w = markerArray.markers[index-1].pose.orientation.w
goal_pub.publish(pose)
try_again = 0 #不允许再次尝试前往尚未抵达的该目标点
#如果已经尝试过前往尚未抵达的目标点,则前往下一个目标点
elif index < len(markerArray.markers): #若还未完成目标点
rospy.logwarn('try reach the target point '+str(index-1)+' failed! reach next point:'+'\r\n'+
'x:'+str(markerArray.markers[index-1].pose.position.x)+
', y:'+str(markerArray.markers[index-1].pose.position.y)+
', z:'+str(markerArray.markers[index-1].pose.orientation.z)+
', w:'+str(markerArray.markers[index-1].pose.orientation.w))
if index==count: index=0 #如果下一个目标点序号为count,说明当前目标点为最后一个目标点,下一个目标点序号应该设置为0
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.z = markerArray.markers[index].pose.orientation.z
pose.pose.orientation.w = markerArray.markers[index].pose.orientation.w
goal_pub.publish(pose)
index += 1 #下一次要发布的目标点序号
try_again = 1 #允许再次尝试前往尚未抵达的该目标点
函数内部执行的操作均为封装PoseStamped话题并通过goal_pub发布给小车运动控制节点进行执行。这里我们主要看该函数的导航逻辑
1
if msg.status.status == 3 and count>0 : #成功到达任意目标点,前往下一目标点
在我们受到的参数msg中,status为3代表成功到达目标点,4(或者任何其他值)代表失败。判断count > 0是为了确定小车处于多点导航模式。如果count为0代表小车只是执行了一次自主导航,而没有开启多点导航,故不执行后面程序
2
if index == count: #当index等于count时,表示所有目标点完成,重新开始巡航
print (‘Reach the target point ‘+str(index-1)+’:’)
index代表下一个目标点,count代表目标点总数。因此当两者相等时代表本轮巡航彻底完成,开始新一轮巡航。
这时我们将index重设为0,并发布话题让小车回到0点
3
elif index < count: #当index小于count时,表示还未完成所有目标点,目标巡航未完成
index小于count时代表还没有完成所有目标点,此时发布话题指挥小车前往下一个目标点并使index + 1。这里注意区分index - 1代表了当前小车所在目标点,而index 代表小车要去的下一个目标点
4
elif count > 0: #未抵达设定的目标点
此时代表小车处于多点导航状态,但是没有收到成功信息3,代表小车没有成功到达目标点。这时如果try_again为1,代表小车有一次再次尝试机会,控制小车再次前往目标点(前往当前目标点index - 1)。如果尝试后依然失败,则让小车前往下一个目标点(index)