多机多卡技术测试-单节点多DCU(任务划分型-无数据传输矩阵乘法)
文件目录:
common.h
#include Makefile
SOURCE =$(wildcard *.cpp)
OBJS =$(patsubst %.cpp,%,$(SOURCE))
HIPCC = /opt/rocm/bin/hipcc
GCC=/opt/rh/devtoolset-7/root/usr/bin/gcc
all:$(OBJS)
$(OBJS):%:%.cpp
$(HIPCC) $^ -o $@
run:
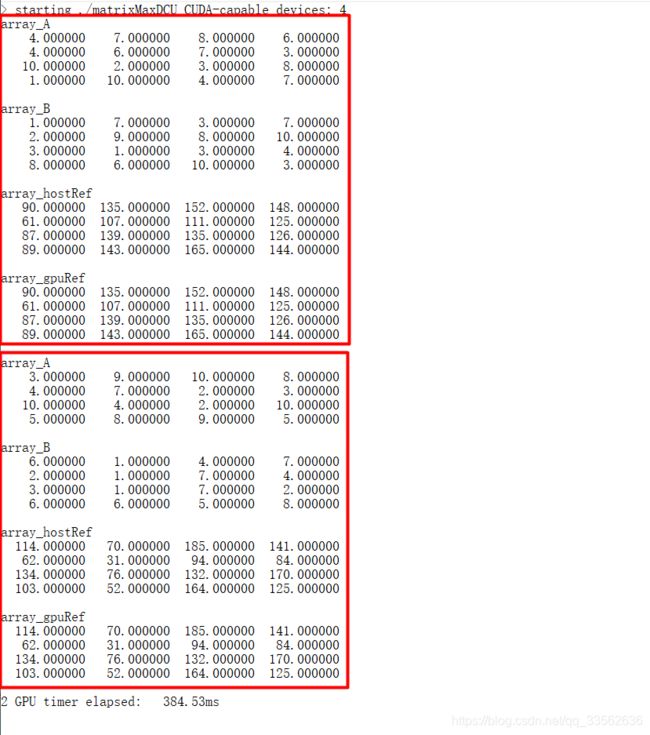
./matrixMaxDCU 2 4 4 4 1
clean:
-rm $(OBJS)
matrixMaxDCU.cpp
#include "common.h"
#include > > (d_A[i], d_B[i], d_C[i], m, k, k, n, m, n);
hipLaunchKernelGGL(matrixMultiplyShared, grid, block, 0, stream[i], d_A[i], d_B[i], d_C[i], m, k, k, n, m, n);
CHECK(hipMemcpyAsync(gpuRef[i], d_C[i], Cxy * sizeof(float), hipMemcpyDeviceToHost,
stream[i]));
}
// synchronize streams
for (int i = 0; i < ngpus; i++)
{
CHECK(hipSetDevice(i));
CHECK(hipStreamSynchronize(stream[i]));
}
const char* array_A = "array_A";
const char* array_B = "array_B";
const char* array_hostRef = "array_hostRef";
const char* array_gpuRef = "array_gpuRef";
if (ifprint)
for (int i = 0; i < ngpus; i++)
{
CHECK(hipSetDevice(i));
// printData(h_A[i], iSize);
printMatrix(array_A, h_A[i], m, k);
printMatrix(array_B, h_B[i], k, n);
printMatrix(array_hostRef, hostRef[i], m, n);
printMatrix(array_gpuRef, gpuRef[i], m, n);
}
double iElaps = seconds() - iStart;
printf("%d GPU timer elapsed: %8.2fms \n", ngpus, iElaps * 1000.0);
for (int i = 0; i < ngpus; i++)
{
CHECK(hipSetDevice(i));
checkResult(hostRef[i], gpuRef[i], Cxy);
}
for (int i = 0; i < ngpus; i++)
{
CHECK(hipSetDevice(i));
CHECK(hipFree(d_A[i]));
CHECK(hipFree(d_B[i]));
CHECK(hipFree(d_C[i]));
CHECK(hipHostFree(h_A[i]));
CHECK(hipHostFree(h_B[i]));
CHECK(hipHostFree(hostRef[i]));
CHECK(hipHostFree(gpuRef[i]));
CHECK(hipStreamDestroy(stream[i]));
CHECK(hipDeviceReset());
}
free(d_A);
free(d_B);
free(d_C);
free(h_A);
free(h_B);
free(hostRef);
free(gpuRef);
free(stream);
return 0;
}
运行结果: