- 如何使用idea 连接达梦数据库?
大大怪~将军
intellij-idea数据库mybatis
1:首先打开idea,点击右上角的数据库2:将达梦数据库的jar包配置一下(一般在driver/jdbc目录下)3:点击应用或者确定之后,重新点击idea右侧的数据库4:连接地址:jdbc:dm://127.0.0.1:5236/DMSERVER?zeroDateTimeBehavior=convertToNull&useUnicode=true&characterEncoding=utf-8
- 【AI】Jetson Nano烧写SD卡镜像:Ubuntu20.04
郭老二
AIlinux驱动JetsonNano
1、简述JetsonNano出厂时,默认支持Ubuntu18.04。各个厂家的国产板子,自带的也是Ubuntu18.04。如何升级到Ubuntu20.04呢?2、在线升级首先确保JetsonNano已经烧写了Ubuntu18.04,然后在线升级至Ubuntu20.041)删除谷歌浏览器sudoapt-getremove--purgechromium-browserchromium-browser-
- 回归任务训练--MNIST全连接神经网络(Mnist_NN)
豆芽819
深度学习框架PyTorchpytorch深度学习人工智能机器学习回归
importtorchimportnumpyasnpimportloggingfromtorch.utils.dataimportTensorDataset,DataLoaderfromtorch.utils.dataimportDataLoader#配置日志logging.basicConfig(level=logging.INFO,format='%(asctime)s-%(levelname
- Android Google Pay接入
2401_87017192
androidwindows
//TheBillingClientisready.Youcanquerypurchaseshere.}}@OverridepublicvoidonBillingServiceDisconnected(){//Trytorestarttheconnectiononthenextrequestto//GooglePlaybycallingthestartConnection()method.}});
- C语言 - getchar() 和 getch() 的区别
Peter_Deng.
c语言算法
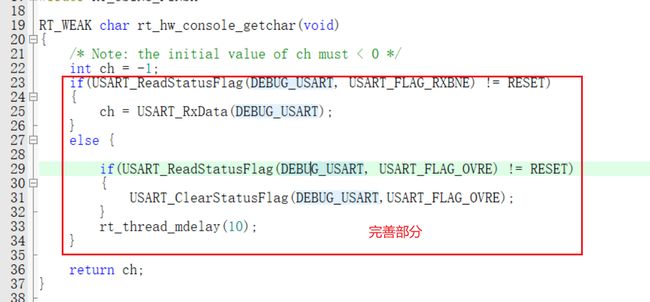
getchar()和getch()都是用于读取单个字符的函数,但它们有一些关键区别,主要涉及缓冲区、回显和移植性。1.getchar()特点头文件:#include从标准输入(stdin)读取一个字符,需要按下Enter才能生效。带缓冲(Buffered):用户输入的内容会先存入缓冲区,只有按下Enter之后,getchar()才会从缓冲区读取数据。回显(Echo):输入的字符会显示在屏幕上。代码
- 交叉编译python3.8
岁月金刀
pythonlinux开发语言
参考链接:交叉编译移植Python到arm架构下的Linux系统-白菜没我白-博客园Python3交叉编译步骤(二)-三方库的交叉编译-秀才哥哥-博客园一、先安装Ubantu虚拟机上的python:1,下载python3.8安装包2,安装依次执行如下步骤:./configureprefix=/usr/local/python3//prefix是指定安装目录,你可以自己新建目录安装到那里makema
- 02自动化测试常用函数
不会算法的笨小孩
测试前端javascripthtml测试
一、元素定位1、查找元素①find_element(方式,"元素")//查找一个元素②find_elements(方式,"元素")//查找多个元素code:find_elements的使用,返回值是一个列表importtimefromseleniumimportwebdriverfromselenium.webdriver.chrome.serviceimportServicefromseleni
- MDK(Keil μVision 5)的编译过程及文件类型全解
froxy
工具armstm32
MDK(KeilμVision5)的编译过程及文件类型全解一、编译过程MDK的编译过程主要分为预处理、编译、汇编、链接、生成可执行文件、格式转换六个阶段。以下是详细流程:预处理(Preprocessing)工具:armcc(ARMC/C++编译器)输入文件:.c(C源文件)、.h(头文件)输出文件:.i(预处理后的临时文件,默认不保存)作用:展开宏、处理条件编译指令(如#ifdef)、合并头文件到
- 嵌入式硬件设计 — 智能设备背后的隐形架构大师
m0_74825238
面试学习路线阿里巴巴嵌入式硬件架构
目录引言?一、嵌入式硬件设计概述(一)需求分析(二)硬件选型(三)电路设计(四)PCB制作与焊接(五)硬件调试与测试(六)软件移植与开发二、嵌入式硬件选型(一)微控制器(MCU)/微处理器(MPU)(二)存储器(三)传感器与执行器(四)电源管理芯片(五)通信接口芯片三、嵌入式硬件代码开发(一)开发环境搭建(二)底层驱动程序开发引言嵌入式系统已经渗透到我们生活的方方面面,从智能手机、智能家居到工业自
- Spring Boot 外部化配置 (Externalized Configuration) 超详解:灵活管理应用配置,打造可移植、可扩展的应用
无眠_
springboot数据库oracle
引言在SpringBoot应用开发中,配置管理是至关重要的环节。不同的环境(开发、测试、生产)通常需要不同的配置参数,例如数据库连接、端口号、日志级别、第三方API密钥等等。SpringBoot外部化配置(ExternalizedConfiguration)提供了一套强大的机制,允许我们将应用的配置从代码中解耦出来,并通过多种外部来源进行灵活管理,从而打造出可移植、可扩展、易于维护的SpringB
- 【从漏洞到防护:浅谈Docker不容忽视的安全问题】
OpsEye
docker网络安全安全运维
从漏洞到防护:浅谈Docker不容忽视的安全问题文章目录前言一、Docker存在的漏洞二、场景案例三、安全基线标准总结前言在网络时代,几乎所有编写的软件和应用都存在潜在的漏洞,想要完全没有漏洞的应用是几乎不可能实现的,当然Docker也不例外。Docker容器技术在提供高效、可移植的软件部署环境的同时,也带来了一些安全挑战。针对Docker自身的漏洞,黑客的攻击手段层出不穷,给企业带来了多方面的挑
- table合并行
花归去
vue3elementvue.jsjavascriptelementui
{{scope.row.gdLength/10}}importtype{TableColumnCtx}from'element-plus';consttableData=[{"id":6140,"projectId":1306,"projectName":"","sectionId":12985,"sectionName":"YYZQ-9标","tunnelId":96160,"tunnelNam
- Linux内核srio驱动,Zynq—Linux移植学习笔记(十四):RapidIO驱动开发
weixin_39942572
Linux内核srio驱动
#defineDRIVER_NAME"xiic-rio"#defineSRIO_ZYNQ_BASEADDR0x40000000#defineSRIO_ZYNQ_NODE_BASEADDR0x10100#defineSRIO_ZYNQ_MAX_HOPCOUNT13structxiic_rio{structmutexlock;u8*data;};/*Weneedglobalvarriableforma
- 深度学习模型性能全景评估与优化指南
niuTaylor
深度学习人工智能
深度学习模型性能全景评估与优化指南一、算力性能指标体系1.核心算力指标对比指标计算方式适用场景硬件限制TOPS(TeraOperationsPerSecond)每秒万亿次整数运算量化模型推理NVIDIAJetsonNano仅支持FP16/FP32TFLOPS(TeraFLoating-pointOPerationsperSecond)TFLOPS=Cores×FLOPs/Cycle×Frequen
- Python点名器代码及打包教程
羽落惊鸿TQ
python开发语言
接下来再写一个功能性齐全稍微复杂一点的Python点名器程序,在原简易版的基础上增加历史记录功能、支持多种名单格式(CSV/Excel)、增加点名统计功能,并详细说明了将该程序打包成exe可执行文件的方法,以下是源代码,仅供学习参考:importtkinterastkfromtkinterimportttk, messagebox, filedialogimportrandomimportcsvi
- stm32完全学习——NRF24L01模块
小A159
STM32完全学习stm32学习嵌入式硬件
对于这个模块的移植,无论是标准库还是HAL库,无论是软件模拟SPI还是,硬件SPI通信,网上都有很多的例子,这里关于移植的事情就不再赘述了。一、调试中遇到的一些问题我是用的别人的代码进行移植的,使用的是软件模拟SPI时序,在进行通信的时候,可以正确检测到NRF24L01的存在,但是发送数据和接收数据都不能成功的运行,本来以为是发送的时候数据包设置的不正确,后来发现他的代码里面使用软件SPI里面的延
- freecad嵌入工作台
黄河里的小鲤鱼
软件开发建模python
1Introduction导言FreeCADcanbeimportedasaPythonmoduleinotherprogramsorinastandalonePythonconsole,togetherwithallitsmodulesandcomponents.It’sevenpossibletoimporttheFreeCADuserinterfaceasapythonmodulebutwi
- Docker下载,包含Win、Mac
码码哈哈0.0
实用工具docker容器运维
介绍Docker是一种开源的容器化平台,通过操作系统级虚拟化技术实现应用的快速开发、部署和运行。以下从多个维度对Docker进行详细介绍:一、Docker的核心概念与功能容器化技术Docker利用Linux内核的容器隔离技术(如Cgroups和Namespace),将应用及其依赖打包为轻量级、可移植的容器。容器与虚拟机不同,它无需模拟完整操作系统,而是共享主机内核,因此启动更快、资源占用更低。核心
- Selenium自动化之鼠标悬停操作
DansonC
python自动化selenium自动化鼠标悬停
#鼠标悬停,move_to_element,光标移到指定元素上,停留几秒fromselenium.webdriverimportActionChainsActionChains(self.driver).move_to_element§.perform()time.sleep(2)importunittestimporttimefromseleniumimportwebdriverfromsele
- 模型部署实战:PyTorch生产化指南
小诸葛IT课堂
pytorch人工智能python
一、为什么要做模型部署?模型部署是将训练好的模型投入实际应用的关键步骤,涉及:模型格式转换(TorchScript/ONNX)性能优化(量化/剪枝)构建API服务移动端集成本章使用ResNet18实现图像分类,并演示完整部署流程。二、模型转换:TorchScript与ONNX1.准备预训练模型importtorchimporttorchvision#加载预训练模型model=torc
- stm32h7关串口中断怎么弄_stm32h7“HardFault_Handler(硬件异常中断)分析”
weixin_39926191
stm32h7关串口中断怎么弄
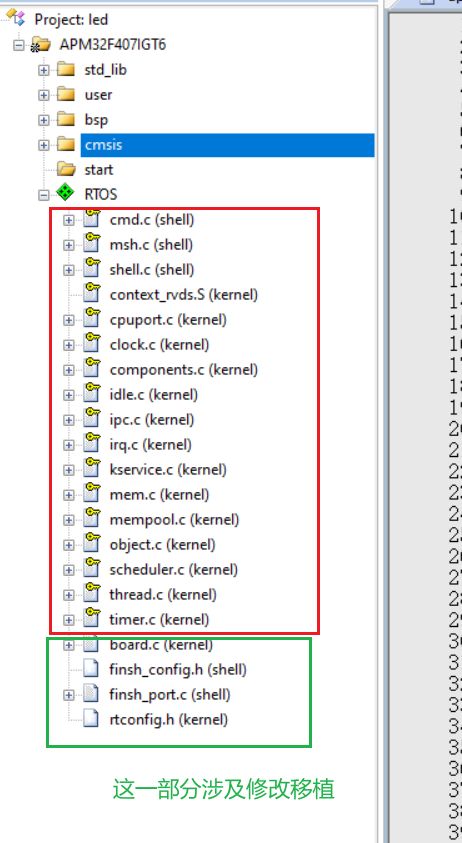
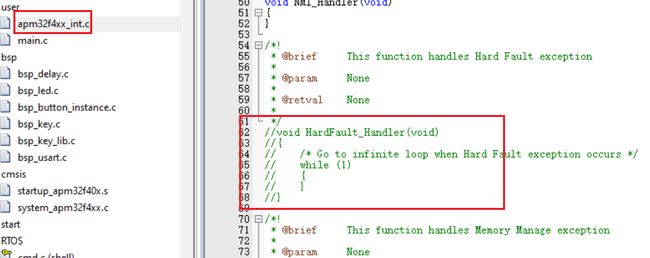
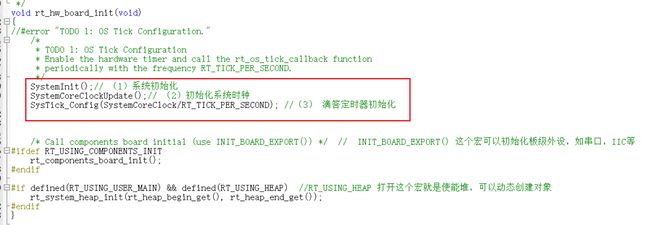
在stm32调试中有时候会进入硬件异常中断HardFault_Handler。SEGGER公司(旗下有大名鼎鼎的emWin图形工具)提供一种硬件异常中断HardFault_Handler定位调试方法。在MDK和IAR开发环境都适用。这里,我们在MDK开发环境上记录一次调试经历。1、硬件异常案例主函数是对按键K1和摇杆OK的接收处理操作,如伪代码1伪代码1intmain(void){//按键初始化函
- 深入解析 MySQL 数据库:隔离级别的选择
幽兰的天空
MYSQL数据库数据库mysqloracle
在数据库中,创建事务一般包含几个简单的步骤。以下是如何在MySQL中创建事务的基本指南,包括相关的SQL语句和操作流程:1.启动事务在MySQL中,你可以使用STARTTRANSACTION或BEGIN语句来启动一个新的事务。这表示你将开始执行一系列操作,这些操作要么全部成功(提交),要么全部失败(回滚)。STARTTRANSACTION;--或者使用BEGIN;2.执行操作在事务被启动后,你可以
- 智慧交通是什么,可以帮助我们解决什么问题?
Guheyunyi
运维大数据人工智能信息可视化前端
智慧交通是什么?智慧交通(SmartTransportation)是指利用物联网(IoT)、大数据、人工智能(AI)、云计算、5G通信等先进技术,对交通系统进行智能化管理和优化,以提高交通效率、减少拥堵、降低事故率、提升出行体验,并实现交通资源的合理配置和可持续发展。智慧交通的核心是通过数据采集、分析和应用,实现交通系统的智能化、自动化和协同化,从而构建一个高效、安全、绿色、便捷的交通生态系统。智
- C语言历史
李鲶鱼
学习c++c语言
从程序语言的发展过程可以看到,以前的操作系统等系统软件主要是用汇编语言编写的。但由于汇编语言依赖于计算机硬件,程序的可读性和可移植性都不是很好,为了提高可读性和可移植性,人们开始寻找一种语言,这种语言应该既具有高级语言的特性,又不失低级语言的优点。于是,C语言产生了。C语言是在由UNIX的研制者丹尼斯·里奇(DennisRitchie)和肯•汤普逊(KenThompson)于1970年研制出的BC
- C#实战:使用ZXing.NET库轻松生成二维码与条形码
墨瑾轩
一起学学C#【一】c#.net开发语言
下面我将详细介绍C#中用于生成二维码和条形码的库——ZXing.NET,并附带一份详细的代码示例,其中每行代码均配有注释以解释其功能。ZXing.NET是基于开源项目ZXing(ZebraCrossing)的.NET移植版,它提供了生成和解析多种一维条形码和二维二维码的功能。准备工作首先,确保您已通过NuGet包管理器在项目中安装了ZXing.NET库。在VisualStudio中,可以通过以下步
- python3实现爬取淘宝页面的商品的数据信息(selenium+pyquery+mongodb)
flood_d
mongodbpythonseleniumpyquery爬虫
1.环境须知做这个爬取的时候需要安装好python3.6和selenium、pyquery等等一些比较常用的爬取和解析库,还需要安装MongoDB这个分布式数据库。2.直接上代码spider.pyimportrefromconfigimport*importpymongofromseleniumimportwebdriverfromselenium.common.exceptionsimportT
- 基于Python拉取tiktok直播视频流,并将视频流切割成一定时长的视频片段
sh_moranliunian
蜘蛛侠网络爬虫后端python爬虫
通过访问tiktok的直播间网页,从网页的script标签内部提取出关于该直播间的相关信息的JSON串,最终从JSON里提取出直播视频流的hls地址和直播间的其他信息。importsysimportrequestsimportjsonimporttimeimportsubprocessfromurllib.parseimporturlunparsefrombs4importBeautifulSou
- Eaglewood-开发单片机函数封装技巧
OverflowSummer
嵌入式泛用知识学习笔记单片机嵌入式硬件
目录一、核心原则:(一)、高内聚低耦合:每个函数只做一件事,减少依赖。(二)、接口清晰:隐藏实现细节。(三)、可配置性:通过宏、结构体或回调支持灵活扩展。(四)、可移植性:抽象硬件差异,降低移植成本。一、模块化设计五、宏定义配置参数二、在头文件中宏定义函数三、使用结构体封装硬件配置四、回调函数机制六、错误处理与返回值封装七、硬件抽象层(HAL)八、静态函数限制作用域九、版本兼容性设计十、使用con
- 焊接性能分析代码(Python)
骑蜗牛上月亮
python开发语言
welding_performance_data.xls数据文件。welding_strengthtoughness5001052012480855015490953013510115401447075601690018600121500139111578115importpandasaspdimportmatplotlib.pyplotaspltimporttkinterastkfrommatp
- 工业相机的主要参数及计算
51camera
工业相机
工业相机是机器视觉系统中的关键组件,其本质是将光信号转变为有序的电信号,进而实现数字图像的获取,广泛应用于工业生产、检测、测量等领域。其成像原理与小孔成像类似,但更为复杂。当被摄物体反射的光线通过工业镜头折射后,会投射到相机的感光传感器上,这个感光传感器通常是电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)。dalsanano系列工业相机1、工作原理图像采集:通过镜头收集被拍摄物体反射或透
- java杨辉三角
3213213333332132
java基础
package com.algorithm;
/**
* @Description 杨辉三角
* @author FuJianyong
* 2015-1-22上午10:10:59
*/
public class YangHui {
public static void main(String[] args) {
//初始化二维数组长度
int[][] y
- 《大话重构》之大布局的辛酸历史
白糖_
重构
《大话重构》中提到“大布局你伤不起”,如果企图重构一个陈旧的大型系统是有非常大的风险,重构不是想象中那么简单。我目前所在公司正好对产品做了一次“大布局重构”,下面我就分享这个“大布局”项目经验给大家。
背景
公司专注于企业级管理产品软件,企业有大中小之分,在2000年初公司用JSP/Servlet开发了一套针对中
- 电驴链接在线视频播放源码
dubinwei
源码电驴播放器视频ed2k
本项目是个搜索电驴(ed2k)链接的应用,借助于磁力视频播放器(官网:
http://loveandroid.duapp.com/ 开放平台),可以实现在线播放视频,也可以用迅雷或者其他下载工具下载。
项目源码:
http://git.oschina.net/svo/Emule,动态更新。也可从附件中下载。
项目源码依赖于两个库项目,库项目一链接:
http://git.oschina.
- Javascript中函数的toString()方法
周凡杨
JavaScriptjstoStringfunctionobject
简述
The toString() method returns a string representing the source code of the function.
简译之,Javascript的toString()方法返回一个代表函数源代码的字符串。
句法
function.
- struts处理自定义异常
g21121
struts
很多时候我们会用到自定义异常来表示特定的错误情况,自定义异常比较简单,只要分清是运行时异常还是非运行时异常即可,运行时异常不需要捕获,继承自RuntimeException,是由容器自己抛出,例如空指针异常。
非运行时异常继承自Exception,在抛出后需要捕获,例如文件未找到异常。
此处我们用的是非运行时异常,首先定义一个异常LoginException:
/**
* 类描述:登录相
- Linux中find常见用法示例
510888780
linux
Linux中find常见用法示例
·find path -option [ -print ] [ -exec -ok command ] {} \;
find命令的参数;
- SpringMVC的各种参数绑定方式
Harry642
springMVC绑定表单
1. 基本数据类型(以int为例,其他类似):
Controller代码:
@RequestMapping("saysth.do")
public void test(int count) {
}
表单代码:
<form action="saysth.do" method="post&q
- Java 获取Oracle ROWID
aijuans
javaoracle
A ROWID is an identification tag unique for each row of an Oracle Database table. The ROWID can be thought of as a virtual column, containing the ID for each row.
The oracle.sql.ROWID class i
- java获取方法的参数名
antlove
javajdkparametermethodreflect
reflect.ClassInformationUtil.java
package reflect;
import javassist.ClassPool;
import javassist.CtClass;
import javassist.CtMethod;
import javassist.Modifier;
import javassist.bytecode.CodeAtt
- JAVA正则表达式匹配 查找 替换 提取操作
百合不是茶
java正则表达式替换提取查找
正则表达式的查找;主要是用到String类中的split();
String str;
str.split();方法中传入按照什么规则截取,返回一个String数组
常见的截取规则:
str.split("\\.")按照.来截取
str.
- Java中equals()与hashCode()方法详解
bijian1013
javasetequals()hashCode()
一.equals()方法详解
equals()方法在object类中定义如下:
public boolean equals(Object obj) {
return (this == obj);
}
很明显是对两个对象的地址值进行的比较(即比较引用是否相同)。但是我们知道,String 、Math、I
- 精通Oracle10编程SQL(4)使用SQL语句
bijian1013
oracle数据库plsql
--工资级别表
create table SALGRADE
(
GRADE NUMBER(10),
LOSAL NUMBER(10,2),
HISAL NUMBER(10,2)
)
insert into SALGRADE values(1,0,100);
insert into SALGRADE values(2,100,200);
inser
- 【Nginx二】Nginx作为静态文件HTTP服务器
bit1129
HTTP服务器
Nginx作为静态文件HTTP服务器
在本地系统中创建/data/www目录,存放html文件(包括index.html)
创建/data/images目录,存放imags图片
在主配置文件中添加http指令
http {
server {
listen 80;
server_name
- kafka获得最新partition offset
blackproof
kafkapartitionoffset最新
kafka获得partition下标,需要用到kafka的simpleconsumer
import java.util.ArrayList;
import java.util.Collections;
import java.util.Date;
import java.util.HashMap;
import java.util.List;
import java.
- centos 7安装docker两种方式
ronin47
第一种是采用yum 方式
yum install -y docker
- java-60-在O(1)时间删除链表结点
bylijinnan
java
public class DeleteNode_O1_Time {
/**
* Q 60 在O(1)时间删除链表结点
* 给定链表的头指针和一个结点指针(!!),在O(1)时间删除该结点
*
* Assume the list is:
* head->...->nodeToDelete->mNode->nNode->..
- nginx利用proxy_cache来缓存文件
cfyme
cache
user zhangy users;
worker_processes 10;
error_log /var/vlogs/nginx_error.log crit;
pid /var/vlogs/nginx.pid;
#Specifies the value for ma
- [JWFD开源工作流]JWFD嵌入式语法分析器负号的使用问题
comsci
嵌入式
假如我们需要用JWFD的语法分析模块定义一个带负号的方程式,直接在方程式之前添加负号是不正确的,而必须这样做:
string str01 = "a=3.14;b=2.71;c=0;c-((a*a)+(b*b))"
定义一个0整数c,然后用这个整数c去
- 如何集成支付宝官方文档
dai_lm
android
官方文档下载地址
https://b.alipay.com/order/productDetail.htm?productId=2012120700377310&tabId=4#ps-tabinfo-hash
集成的必要条件
1. 需要有自己的Server接收支付宝的消息
2. 需要先制作app,然后提交支付宝审核,通过后才能集成
调试的时候估计会真的扣款,请注意
- 应该在什么时候使用Hadoop
datamachine
hadoop
原帖地址:http://blog.chinaunix.net/uid-301743-id-3925358.html
存档,某些观点与我不谋而合,过度技术化不可取,且hadoop并非万能。
--------------------------------------------万能的分割线--------------------------------
有人问我,“你在大数据和Hado
- 在GridView中对于有外键的字段使用关联模型进行搜索和排序
dcj3sjt126com
yii
在GridView中使用关联模型进行搜索和排序
首先我们有两个模型它们直接有关联:
class Author extends CActiveRecord {
...
}
class Post extends CActiveRecord {
...
function relations() {
return array(
'
- 使用NSString 的格式化大全
dcj3sjt126com
Objective-C
格式定义The format specifiers supported by the NSString formatting methods and CFString formatting functions follow the IEEE printf specification; the specifiers are summarized in Table 1. Note that you c
- 使用activeX插件对象object滚动有重影
蕃薯耀
activeX插件滚动有重影
使用activeX插件对象object滚动有重影 <object style="width:0;" id="abc" classid="CLSID:D3E3970F-2927-9680-BBB4-5D0889909DF6" codebase="activex/OAX339.CAB#
- SpringMVC4零配置
hanqunfeng
springmvc4
基于Servlet3.0规范和SpringMVC4注解式配置方式,实现零xml配置,弄了个小demo,供交流讨论。
项目说明如下:
1.db.sql是项目中用到的表,数据库使用的是oracle11g
2.该项目使用mvn进行管理,私服为自搭建nexus,项目只用到一个第三方 jar,就是oracle的驱动;
3.默认项目为零配置启动,如果需要更改启动方式,请
- 《开源框架那点事儿16》:缓存相关代码的演变
j2eetop
开源框架
问题引入
上次我参与某个大型项目的优化工作,由于系统要求有比较高的TPS,因此就免不了要使用缓冲。
该项目中用的缓冲比较多,有MemCache,有Redis,有的还需要提供二级缓冲,也就是说应用服务器这层也可以设置一些缓冲。
当然去看相关实现代代码的时候,大致是下面的样子。
[java]
view plain
copy
print
?
public vo
- AngularJS浅析
kvhur
JavaScript
概念
AngularJS is a structural framework for dynamic web apps.
了解更多详情请见原文链接:http://www.gbtags.com/gb/share/5726.htm
Directive
扩展html,给html添加声明语句,以便实现自己的需求。对于页面中html元素以ng为前缀的属性名称,ng是angular的命名空间
- 架构师之jdk的bug排查(一)---------------split的点号陷阱
nannan408
split
1.前言.
jdk1.6的lang包的split方法是有bug的,它不能有效识别A.b.c这种类型,导致截取长度始终是0.而对于其他字符,则无此问题.不知道官方有没有修复这个bug.
2.代码
String[] paths = "object.object2.prop11".split("'");
System.ou
- 如何对10亿数据量级的mongoDB作高效的全表扫描
quentinXXZ
mongodb
本文链接:
http://quentinXXZ.iteye.com/blog/2149440
一、正常情况下,不应该有这种需求
首先,大家应该有个概念,标题中的这个问题,在大多情况下是一个伪命题,不应该被提出来。要知道,对于一般较大数据量的数据库,全表查询,这种操作一般情况下是不应该出现的,在做正常查询的时候,如果是范围查询,你至少应该要加上limit。
说一下,
- C语言算法之水仙花数
qiufeihu
c算法
/**
* 水仙花数
*/
#include <stdio.h>
#define N 10
int main()
{
int x,y,z;
for(x=1;x<=N;x++)
for(y=0;y<=N;y++)
for(z=0;z<=N;z++)
if(x*100+y*10+z == x*x*x
- JSP指令
wyzuomumu
jsp
jsp指令的一般语法格式: <%@ 指令名 属性 =”值 ” %>
常用的三种指令: page,include,taglib
page指令语法形式: <%@ page 属性 1=”值 1” 属性 2=”值 2”%>
include指令语法形式: <%@include file=”relative url”%> (jsp可以通过 include