MSP430F5529 DriverLib 库函数学习笔记(四点五)printf打印输出
目录
- 代码实现
- 使相应工程支持打印浮点数
- 实验结果
平台:Code Composer Studio 10.3.1
MSP430F5529 LaunchPad™ Development Kit
(MSP‑EXP430F5529LP)
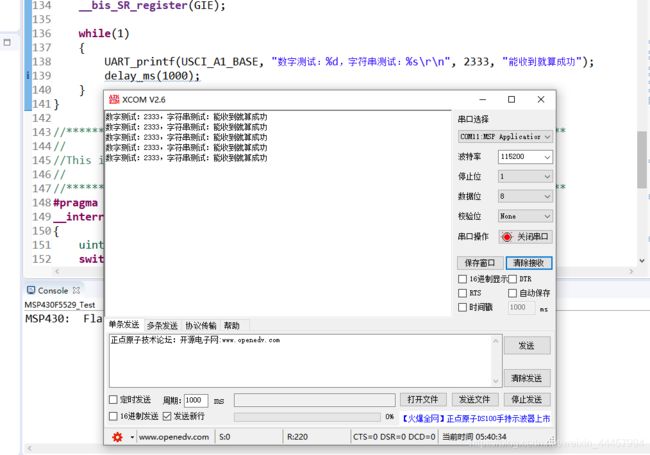
代码实现
重定向fputc(int ch, FILE *f)直接使用printf的方法只有字符串和%s打印正常,数字打印不出来
只好换成这个。
这个程序是我以前写在STM32里的,现在移植过来,效果依然不错。
#include 整个源文件如下
#include "driverlib.h"
#define MCLK_IN_HZ 25000000
#define delay_us(x) __delay_cycles((MCLK_IN_HZ/1000000*(x)))
#define delay_ms(x) __delay_cycles((MCLK_IN_HZ/1000*(x)))
#include 使相应工程支持打印浮点数
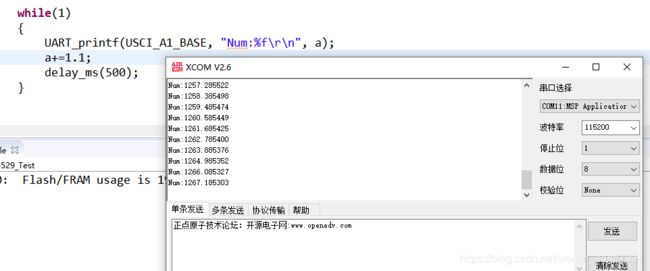
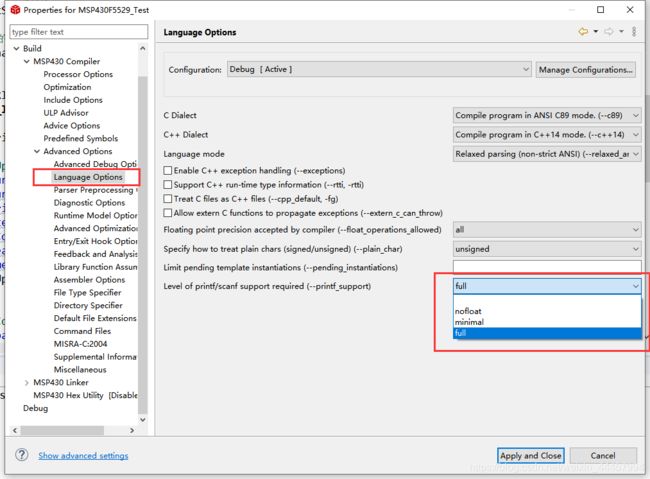
若需要打印浮点数,则需设置对应工程
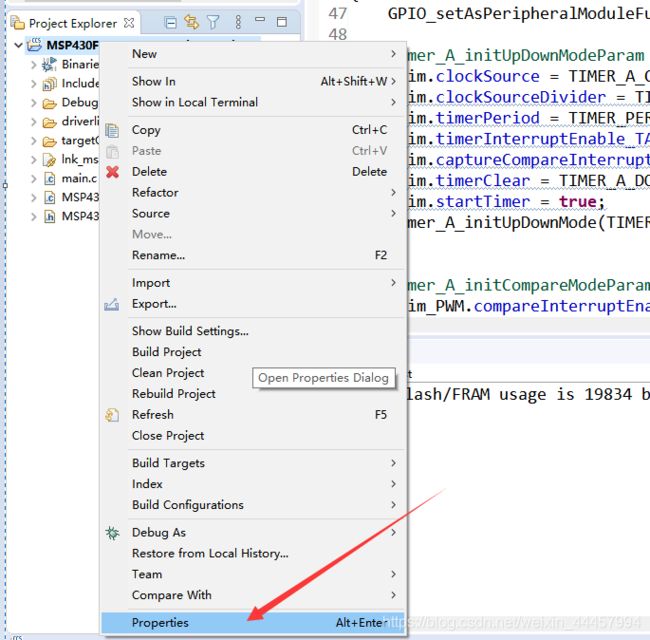
将此处设为full即可
实验结果