【YOLO系列】YOLO v3(网络结构图+代码)
文章目录
-
- 网络结构
-
- YOLO v3
- YOLOv3-SPP
- 多尺度预测
- 损失函数
- 参考
最近在研究YOLO系列,打算写一系列的YOLO博文。在YOLO的发展史中,v1到v3算法思想逐渐完备,后续的系列也都以v3为基石,在v3的基础上进行改进,所以很有必要单独出一篇详细讲解v3的博文。
网络结构
从 Ali Farhadi的YOLO网站主页下载YOLOv3-320和YOLOv3-spp的权重。加了SPP结构的YOLO v3,mAP会更高,但是速度会变慢。
![]()
![]()
然后基于qqwweee/keras-yolo3项目中的convert.py文件将.weight转换成.h5格式。权重格式转换需要keras和tensorflow的环境。转换命令如下所示。
python convert.py yolov3.cfg yolov3.weights model_data/yolo.h5
python convert.py yolov3-spp.cfg yolov3-spp.weights model_data/yolov3-spp.h5
YOLO v3
权重格式转换后会打印出yolov3的各层级关联信息,基于此信息,得到下述的YOLOv3网络结构简图,从此结构简图中,可以看出,YOLO v3整体网络架构是一个全卷积神经网络,无池化层,它通过卷积的步长实现张量尺寸的变化。每个Resn起始都有一个PCBL,将卷积的步长设置为2使得输出张量尺寸是输入张量尺寸的1/2,五个Resn的总步长为32。
YOLO v3的基础组件简写为CBL,即卷积+BN+leaky relu激活函数的组合;v3中大量应用了Res_block,Resn中的n表示有几个res_unit,v3中负责提取图像特征的backbone网络主要由五个Resn组成,v3论文中称主干网络中总有53个卷积,所以backbone网络被称为Darknet-53。但是打印出来的网络结构,却有1+3(1+21)+5(1+22)+17(1+28)+17+9(1+24)=52个卷积,又下载YOLOv3-416的权重进行转换验证,主干网络仍有52个卷积。

backbone的keras代码表示如下所示:
def resblock_body(x, num_filters, num_blocks):
'''A series of resblocks starting with a downsampling Convolution2D'''
# Darknet uses left and top padding instead of 'same' mode
x = ZeroPadding2D(((1,0),(1,0)))(x) # padding
x = DarknetConv2D_BN_Leaky(num_filters, (3,3), strides=(2,2))(x) # 步长为2,输出尺寸为1/2输入尺寸
for i in range(num_blocks):
# 残差块
y = compose(
DarknetConv2D_BN_Leaky(num_filters//2, (1,1)), # 残差结构中的1*1卷积
DarknetConv2D_BN_Leaky(num_filters, (3,3)))(x) # 残差结构中的3*3卷积
x = Add()([x,y])
return x
def darknet_body(x):
'''Darknent body having 52 Convolution2D layers'''
x = DarknetConv2D_BN_Leaky(32, (3,3))(x)
x = resblock_body(x, 64, 1) #Res1
x = resblock_body(x, 128, 2) #Res2
x = resblock_body(x, 256, 8) #Res8
x = resblock_body(x, 512, 8) #Res8
x = resblock_body(x, 1024, 4) #Res4
return x
YOLOv3-SPP
如下图所示,YOLOv3-SPP相比于YOLO v3多了一个空间金字塔池化SPP(Space Pyramid Pooling)结构。SPP的提出本来是为了解决剪裁、缩放等操作导致的图像失真问题,不用限制输入图像的尺寸大小,输出尺寸都是固定的。但是YOLO v3是全卷积神经网络,无全连接层,那么不需要固定尺寸的输入,为什么要加入SPP呢?而且加入SPP后能大幅提升精度?
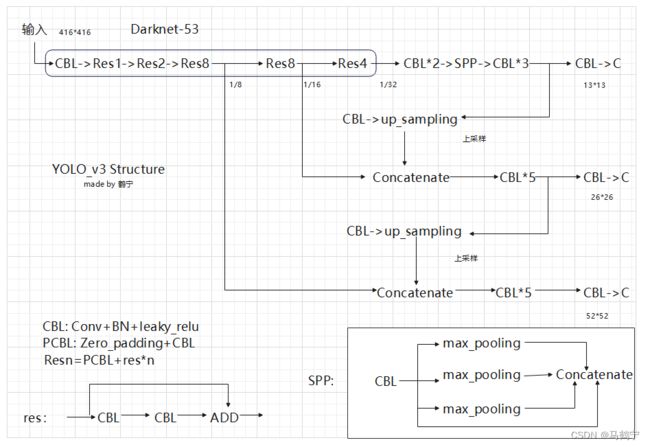
YOLOv3-SPP中是由四个并行的分支构成的,三个池化层和一个跳跃连接,然后将此四个分支Concatenate,比原SPP增加了一个跳跃连接。YOLO v3通过SPP实现了局部特征和全局特征的融合,丰富了特征图的表达能力。如上图所示,SPP只被添加在第一个输出分支上,第二第三输出分支和YOLO v3保持一致。第二第三分支将两个相邻Res_block块的特征进行融合,某种程度上已经实现了不同程度的局部特征的融合,丰富了特征图的表达能力。所以,增加SPP能够提升检测的精度。
多尺度预测
从上述简图中,可以看出YOLO v3是在3个不同尺寸的特征图上进行预测的,这是YOLO v3的一个基本特征,多尺度预测,有助于获得更精细的检测框,可以大大改善对小物体的检测。如果输入的图像大小为 416 × 416 416\times 416 416×416,那么最后三个输出特征图的大小从上往下分别是 13 × 13 13 \times 13 13×13, 26 × 26 26 \times 26 26×26和 52 × 52 52 \times 52 52×52。每种尺度的特征图上每个网格预测3个bbox,对于COCO数据集,每个特征图将的预测张量大小 N × N × [ 3 ∗ ( 4 + 1 + 80 ) ] N \times N \times [ 3 * (4 + 1 + 80)] N×N×[3∗(4+1+80)]。其中N的取值是[12,26,52],4是bbox的4个偏移量,1是物体预测置信度,80是COCO物体类别数量。

v3是通过上采样的方式实现多尺度的特征图。backbone中的每一个Res_block中第一个卷积会将步长设为2,使得特征图的尺寸缩小1倍。从上述的YOLO v3特征图中,我们可以看到有两次上采样,上采样操作将特征图的尺寸扩大一倍,这样得到的特征图尺寸就可以和上一个Res_block的特征图尺寸相同,将两个特征图进行Concatenate操作后,再经过5个CBL和CBL->C操作后就得到最后的输出特征图。
下述代码描述了yolov3的模型结构,make_last_layers为每个尺度分支最后的卷积层,x和y分别对应上述结构图中的CBL*5和CBL->C。yolo_body函数中,第一次上采样得到的特征图和darknet.layers[152].output(backbone中的第二个Res8输出)进行合并操作;第二次上采样的特征图和darknet.layers[92].output(backbone中的第一个Res8输出)进行合并操作。最后的输出有三个分别是y1,y2和y3。
def make_last_layers(x, num_filters, out_filters):
'''6 Conv2D_BN_Leaky layers followed by a Conv2D_linear layer'''
# x为上述结构图中的CBL*5
x = compose(
DarknetConv2D_BN_Leaky(num_filters, (1,1)),
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D_BN_Leaky(num_filters, (1,1)),
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D_BN_Leaky(num_filters, (1,1)))(x)
# y为上述结构图中的CBL->C
y = compose(
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D(out_filters, (1,1)))(x)
return x, y
def yolo_body(inputs, num_anchors, num_classes):
"""Create YOLO_V3 model CNN body in Keras."""
darknet = Model(inputs, darknet_body(inputs)) # backbone
x, y1 = make_last_layers(darknet.output, 512, num_anchors*(num_classes+5))
# 第一次上采样
x = compose(
DarknetConv2D_BN_Leaky(256, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors*(num_classes+5))
# 第二次上采样
x = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[92].output])
x, y3 = make_last_layers(x, 128, num_anchors*(num_classes+5))
return Model(inputs, [y1,y2,y3])
YOLO v3中仍然沿用了v2中用k-means聚类确定bbox的尺寸大小,v3中选了如下9种anchors。
10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
九种anchor,三种不同尺度的输出特征图,每个尺度特征图中的每个grid cell预测3个bbox,那也就是说每种尺度的输出特征图上分配到3个anchors。下采样的倍数越大,其对应的感受野(特征图上的某个点能看到的输入图像的区域)也就越大,那么其对应的特征图更适合检测大物体;相反,下采样的倍数越小,其对应的感受野越小,那么相对应的特征图包含的特征趋向于局部和细节,更适合小物体的检测。
下述代码将真实框转换成训练的输入格式,从下述代码中,我们也可以看出anchor的大小与不同尺度输出特征图的对应关系。
def preprocess_true_boxes(true_boxes, input_shape, anchors, num_classes):
'''Preprocess true boxes to training input format
Parameters
----------
true_boxes: array, shape=(m, T, 5)
Absolute x_min, y_min, x_max, y_max, class_id relative to input_shape.
input_shape: array-like, hw, multiples of 32
anchors: array, shape=(N, 2), wh
num_classes: integer
Returns
-------
y_true: list of array, shape like yolo_outputs, xywh are reletive value
'''
assert (true_boxes[..., 4]<num_classes).all(), 'class id must be less than num_classes'
num_layers = len(anchors)//3 # default setting
anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]] # anchor
true_boxes = np.array(true_boxes, dtype='float32')
input_shape = np.array(input_shape, dtype='int32')
# x,y,w,h处理
boxes_xy = (true_boxes[..., 0:2] + true_boxes[..., 2:4]) // 2
boxes_wh = true_boxes[..., 2:4] - true_boxes[..., 0:2]
true_boxes[..., 0:2] = boxes_xy/input_shape[::-1]
true_boxes[..., 2:4] = boxes_wh/input_shape[::-1]
m = true_boxes.shape[0]
# 每种尺度的特征图的网格大小,输入图像大小为416时为(13,26,52)
grid_shapes = [input_shape//{0:32, 1:16, 2:8}[l] for l in range(num_layers)]
# 对于COCO数据集,每个输出层的shape为(m,N,N,3,85)
y_true = [np.zeros((m,grid_shapes[l][0],grid_shapes[l][1],len(anchor_mask[l]),5+num_classes), dtype='float32') for l in range(num_layers)]
# Expand dim to apply broadcasting.
anchors = np.expand_dims(anchors, 0)
anchor_maxes = anchors / 2.
anchor_mins = -anchor_maxes
valid_mask = boxes_wh[..., 0]>0
for b in range(m):
# Discard zero rows.
wh = boxes_wh[b, valid_mask[b]]
if len(wh)==0: continue
# Expand dim to apply broadcasting.
wh = np.expand_dims(wh, -2)
box_maxes = wh / 2.
box_mins = -box_maxes
# IoU计算
intersect_mins = np.maximum(box_mins, anchor_mins)
intersect_maxes = np.minimum(box_maxes, anchor_maxes)
intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
box_area = wh[..., 0] * wh[..., 1]
anchor_area = anchors[..., 0] * anchors[..., 1]
iou = intersect_area / (box_area + anchor_area - intersect_area)
# Find best anchor for each true box
best_anchor = np.argmax(iou, axis=-1)
for t, n in enumerate(best_anchor):
for l in range(num_layers):
if n in anchor_mask[l]:
i = np.floor(true_boxes[b,t,0]*grid_shapes[l][1]).astype('int32') # x * w
j = np.floor(true_boxes[b,t,1]*grid_shapes[l][0]).astype('int32') # y * h
k = anchor_mask[l].index(n) #0,1,2
c = true_boxes[b,t, 4].astype('int32') # class_id
y_true[l][b, j, i, k, 0:4] = true_boxes[b,t, 0:4]
y_true[l][b, j, i, k, 4] = 1
y_true[l][b, j, i, k, 5+c] = 1
return y_true
损失函数
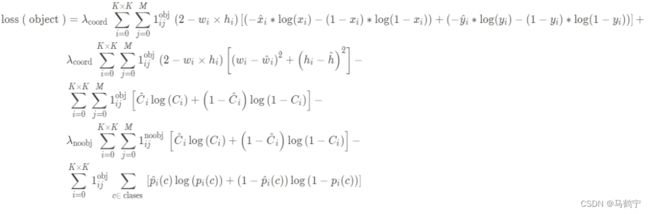
YOLO v3的每个bbox类别类别采用了多标签分类方式。使用独立的逻辑分类器替换softmax分类器。那么,训练时类别损失函数则采用BCE。
下述是YOLO v3的损失函数实现代码,回归损失会乘以一个box_loss_scale系数,它等于2-相对面积,取值范围为(1,2),查了很多解读,box_loss_scale系数是针对小物体的一个小技巧,用来加大对小框的损失。而且x,y的loss用的是交叉熵损失而不是和wh一样用平方差损失。
最终的Loss采用和的形式而未取平均。v3有三种尺度的输出,总共会产生 13 ∗ 13 ∗ 3 + 26 ∗ 26 ∗ 3 + 52 ∗ 52 ∗ 3 = 10647 13*13*3+26*26*3+52*52*3=10647 13∗13∗3+26∗26∗3+52∗52∗3=10647个预测框,正负样本比巨大。如果图像中,只包含一个物体,正负样本比会高达1:10464。如果采用平均损失,会使得损失趋近于0,使得网络失去预测能力。
loss = 0
# batch size
m = K.shape(yolo_outputs[0])[0] # batch size, tensor
mf = K.cast(m, K.dtype(yolo_outputs[0]))
# object_mask
object_mask = y_true[l][..., 4:5] # bbox置信度
box_loss_scale = 2 - y_true[l][...,2:3]*y_true[l][...,3:4] # 权重=2-相对面积,取值范围为(1,2)
# K.binary_crossentropy is helpful to avoid exp overflow.
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[...,0:2], from_logits=True)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh-raw_pred[...,2:4])
confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True)+ (1-object_mask) * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True) * ignore_mask # bbox置信度交叉熵损失
class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[...,5:], from_logits=True) # bbox类别预测交叉熵损失
# 求和
xy_loss = K.sum(xy_loss) / mf
wh_loss = K.sum(wh_loss) / mf
confidence_loss = K.sum(confidence_loss) / mf
class_loss = K.sum(class_loss) / mf
loss += xy_loss + wh_loss + confidence_loss + class_loss
参考
- keras-yolo3
- darknet/yolo/
- YOLOv3: An Incremental Improvement