MMDet3D——可视化库:3D Lidar Boxes坐标投影到Image上并可视化
本代码适用于mmdet3d默认生成的pkl获取到的数据,并使用类似于DETR3D pipline的代码。
代码参考:from mmdet3d.core.visualizer.image_vis import plot_rect3d_on_img, draw_lidar_bbox3d_on_img
文章目录
-
- 可视化主函数
- Lidar Box可视化功能函数
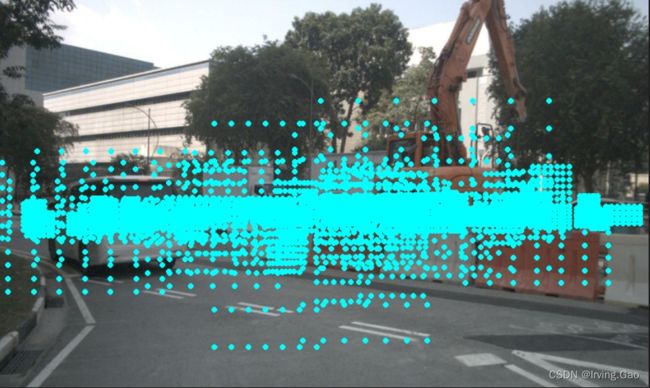
- Image Pts可视化
可视化主函数
- 需要
img_metas、gt_bboxes_3d即可完成画图功能; - 可以插在任意部分的代码中,只要有以上两个变量即可。
# -------------------------- vis -----------------------------
import cv2
img = cv2.imread(kwargs['img_metas'][0]['filename'][0]) # front
r_h, r_w,_ = kwargs['img_metas'][0]['img_shape'][0]
img = cv2.resize(img, (r_w, r_h))
box = kwargs['gt_bboxes_3d'][0]
lidar2img_rt = kwargs['img_metas'][0]['lidar2img'][0]
plot_img = draw_lidar_bbox3d_on_img(box,
raw_img=img,
lidar2img_rt=lidar2img_rt,
img_metas=None,
color=(0, 255, 0),
thickness=1)
cv2.imwrite("plot_img.jpg", plot_img)
# ------------------------------------------------------------
Lidar Box可视化功能函数
import cv2
def plot_rect3d_on_img(img,
num_rects,
rect_corners,
color=(0, 255, 0),
thickness=1):
"""Plot the boundary lines of 3D rectangular on 2D images.
Args:
img (numpy.array): The numpy array of image.
num_rects (int): Number of 3D rectangulars.
rect_corners (numpy.array): Coordinates of the corners of 3D
rectangulars. Should be in the shape of [num_rect, 8, 2].
color (tuple[int]): The color to draw bboxes. Default: (0, 255, 0).
thickness (int, optional): The thickness of bboxes. Default: 1.
"""
line_indices = ((0, 1), (0, 3), (0, 4), (1, 2), (1, 5), (3, 2), (3, 7),
(4, 5), (4, 7), (2, 6), (5, 6), (6, 7))
# filter boxes out of range
h,w,c = img.shape
for i in range(num_rects):
corners = rect_corners[i].astype(np.int)
for idx, corner in enumerate(corners):
corners[idx][0] = w if corner[0] > w else corner[0]
corners[idx][0] = 0 if corner[0] < 0 else corner[0]
corners[idx][1] = w if corner[1] > h else corner[1]
corners[idx][1] = 0 if corner[1] < 0 else corner[1]
# draw
for start, end in line_indices:
cv2.line(img, (corners[start, 0], corners[start, 1]),
(corners[end, 0], corners[end, 1]), color, thickness,
cv2.LINE_AA)
return img.astype(np.uint8)
def draw_lidar_bbox3d_on_img(bboxes3d,
raw_img,
lidar2img_rt,
img_metas,
color=(0, 255, 0),
thickness=1):
"""Project the 3D bbox on 2D plane and draw on input image.
Args:
bboxes3d (:obj:`LiDARInstance3DBoxes`):
3d bbox in lidar coordinate system to visualize.
raw_img (numpy.array): The numpy array of image.
lidar2img_rt (numpy.array, shape=[4, 4]): The projection matrix
according to the camera intrinsic parameters.
img_metas (dict): Useless here.
color (tuple[int]): The color to draw bboxes. Default: (0, 255, 0).
thickness (int, optional): The thickness of bboxes. Default: 1.
"""
img = raw_img.copy()
corners_3d = bboxes3d.corners
num_bbox = corners_3d.shape[0]
pts_4d = np.concatenate(
[corners_3d.reshape(-1, 3),
np.ones((num_bbox * 8, 1))], axis=-1)
lidar2img_rt = copy.deepcopy(lidar2img_rt).reshape(4, 4)
if isinstance(lidar2img_rt, torch.Tensor):
lidar2img_rt = lidar2img_rt.cpu().numpy()
pts_2d = pts_4d @ lidar2img_rt.T
pts_2d[:, 2] = np.clip(pts_2d[:, 2], a_min=1e-5, a_max=1e5)
pts_2d[:, 0] /= pts_2d[:, 2]
pts_2d[:, 1] /= pts_2d[:, 2]
imgfov_pts_2d = pts_2d[..., :2].reshape(num_bbox, 8, 2)
return plot_rect3d_on_img(img, num_bbox, imgfov_pts_2d, color, thickness)

Image Pts可视化
def draw_pts_on_img(img, imgfov_pts_2d, thickness=3, color=[0,255,0]):
'''
imgfov_pts_2d: [n, 2]
'''
if isinstance(imgfov_pts_2d, torch.Tensor):
imgfov_pts_2d = imgfov_pts_2d.detach().cpu().numpy()
h,w,c = img.shape
for i in range(imgfov_pts_2d.shape[0]):
if imgfov_pts_2d[i, 0] > w or imgfov_pts_2d[i, 0] < 0:
continue
if imgfov_pts_2d[i, 1] > h or imgfov_pts_2d[i, 1] < 0:
continue
cv2.circle(
img,
center=(int(np.round(imgfov_pts_2d[i, 0])),
int(np.round(imgfov_pts_2d[i, 1]))),
radius=thickness,
color=color,
thickness=thickness,
)
return img