图像特征检测(python代码实例)
环境
import cv2 as cv
import matplotlib.pyplot as plt
实验所需的图片用下面这俩就可以
box.png
box_in_scene.png

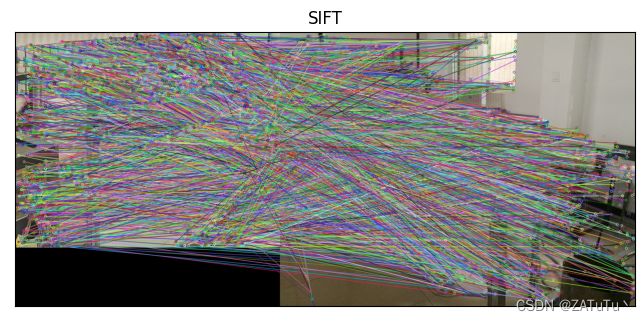
SIFT
SIFT描述子最大的问题在于计算量大、效率不高,不利于后面的特征点匹配.事实上,并不是所有维都在匹配中有着实质性的作用.因而可以用PCA、LDA等特征降维的方法来压缩特征描述子的维度.在此基础上,发展出一大批的改进算法,例如SURF算法、PCA-SIFT算法、 SSIFT算法。
box = cv.imread("./data/stage1.jpg")
box_in_sence = cv.imread("./data/stage2.png")
sift=cv.SIFT_create()
kp1, des1 = sift.detectAndCompute(box,None)
kp2, des2 = sift.detectAndCompute(box_in_sence,None)
# bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
bf = cv.BFMatcher()
matches = bf.match(des1,des2)
# matches = bf.knnMatch(des1,des2,k=2)
# 绘制匹配
result = cv.drawMatches(box, kp1, box_in_sence, kp2, matches, None)
# result = cv.drawMatchesKnn(box, kp1, box_in_sence, kp2, matches, None,flags=2)
# cv.imshow("sift-match", result)
# cv.waitKey(0)
# cv.destroyAllWindows()
plt.figure(figsize=(8,6),dpi=100)
plt.imshow(result[:,:,::-1]),plt.title('SIFT')
plt.xticks([]),plt.yticks([])
plt.show()
BRIEF
BRIEF(Binary robust Independent Elementary Features, 4「靠的二进制基础特征)算法把局部描述子的简化做到了极致算类似于S|FT的复杂特征描述子,只生成一个二值串即可首先,在特征点周围选择一个块,在块内通种特定的方法来采样挑选出n个点对然后对于每一个点对(p,q),比较这两个点的亮度值如果§>(q)则这个点对生成值串的值为1,否则为0所有n个点对,都进行比较之后,就得到位长的二进制串通常n可以设置为128、256或512对于一个SxS的块标准BREF算法的(p,q)采样方式为:p和q都符合(0,S225)的高斯分布BREF算法简单、实时性较好,但无法支持大角度的旋转,因而需要增加其描述子的旋转不变性.
注意!!!
xfeatures2d高版本的opencv已经不兼容,同时由于版权问题,高版本的opencv同时已经不能使用BRIEF算法,所以下面这段代码只能在低版本的opencv环境下使用。
解决上述问题,可以新建一个环境,专门用于低版本opencv的实验,详情可以参考这篇博客低版本opencv配置
box = cv.imread("./data/stage1.jpg")
star = cv.xfeatures2d.StarDetector_create()
brief = cv.xfeatures2d.BriefDescriptorExtractor_create()
kp1 = star.detect(box,None)
kp1, des1 = brief.compute(box, kp1)
box_in_sence = cv.imread("./data/stage2.png")
kp2 = star.detect(box_in_sence,None)
kp2, des2 = brief.compute(box_in_sence, kp2)
# bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
bf = cv.BFMatcher()
matches = bf.match(des1,des2)
# matches = bf.knnMatch(des1,des2,k=2)
# 绘制匹配
result = cv.drawMatches(box, kp1, box_in_sence, kp2, matches, None)
# result = cv.drawMatchesKnn(box, kp1, box_in_sence, kp2, matches, None,flags=2)
# cv.imshow("sift-match", result)
# cv.waitKey(0)
# cv.destroyAllWindows()
plt.figure(figsize=(8,6),dpi=100)
plt.imshow(result[:,:,::-1]),plt.title('BRIEF')
plt.xticks([]),plt.yticks([])
plt.show()

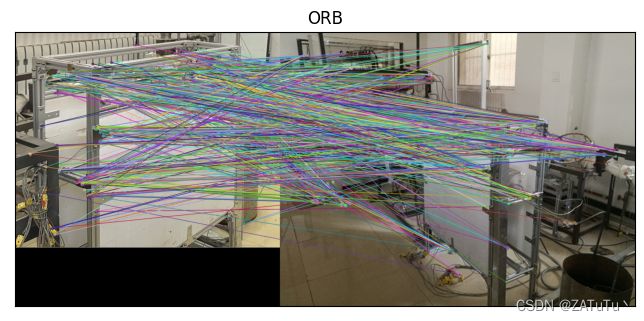
ORB
ORB( Oriented Fast and rotated br|EF,支持FAST方向和BREF旋转不变性)算法17来自于Rube等的论文ORBan efficient alternative to sift or surf,它是现今实时SLAM系统最广泛的算法之一.其特征提取由FAST算法改进利用图像金字塔为其增加了尺度不变性;特征点描述是根据BREF特征描述算法改进的,它利用灰度质心法计算方法来解决以及旋转不变性,并放弃手工选择的n对点,使用数据学习的方法来学习到如何选择256对点事实上,传统手工算法从2010年后与学术算法之间的界限变得模糊,混合使用机器学习和手工特征子成为趋势.
box = cv.imread("./data/stage1.jpg")
box_in_sence = cv.imread("./data/stage2.png")
# cv.imshow("box", box)
# cv.imshow("box_in_sence", box_in_sence)
# 创建ORB特征检测器
orb = cv.ORB_create()
kp1, des1 = orb.detectAndCompute(box,None)
kp2, des2 = orb.detectAndCompute(box_in_sence,None)
# 暴力匹配
# bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
bf = cv.BFMatcher()
# matches = bf.match(des1,des2)
matches = bf.knnMatch(des1,des2,k=2)
# 绘制匹配
# result = cv.drawMatches(box, kp1, box_in_sence, kp2, matches, None)
result = cv.drawMatchesKnn(box, kp1, box_in_sence, kp2, matches, None,flags=2)
# cv.imshow("orb-match", result)
# cv.waitKey(0)
# cv.destroyAllWindows()
plt.figure(figsize=(8,6),dpi=100)
plt.imshow(result[:,:,::-1]),plt.title('ORB')
plt.xticks([]),plt.yticks([])
plt.show()