Autosar AP – AP和CP差异
■ 硬件:
1. 芯片类型:
▪ CP AUTOSAR一般运行在8bit、16bit、32bit的微控制器(MCU)中,如英飞凌的TC3xx,瑞萨的RH850等。
▪ AP AUTOSAR可以运行在64bit的高性能处理器(MPU)、CPU等中,如瑞萨的H3,英伟达的Xavier等。除此之外,AP AUTOSAR也可以运行在虚拟硬件上。
2. 芯片算力:
▪ 运行CP AUTOSAR 的芯片算力一般低于1000 DMIPs
▪ AP AUTOSAR可以运行在算力高于20000 DMIPs的芯片上
■ OS:
1. OS类型:
▪ CP AUTOSAR OS是基于OSEK标准的。
▪ AP AUTOSAR OS是POSIX OS(UNIX, linux),且至少应包含PSE51子集。
2. 开发商:
▪ CP AUTOSAR OS一般由CP AUTOSAR供应商开发,如AUBASS、VECTOR等。
▪ AP AUTOSAR 配套的OS一般是由专门的OS厂商开发的,如eSOL的eMCOS、黑莓的QNX等
■ 架构:
1. CP AUTOSAR
软件分为三层:Application,runtime environment(RTE)和basic software(BSW)。
▪ Application Layer,不依赖于硬件的
▪ 软件模块间通过RTE交互,并通过RTE访问BSW
▪ RTE体现了application的所有接口
▪ BSW又分为3大层和复杂驱动:服务层、ECU抽象层、MCU抽象层
▪ 服务层又细分为不同的服务组件,比如系统服务、存储服务、通信服务等

■ 架构:
2. AP AUTOSAR
Adaptive AUTOSAR标准定义了一个ARA运行环境,分为两种接口类型:service和APIs。平台由根据服务(Platform Service)和Adaptive AUTOSAR基础(Platform Foundation)分组的多个功能栈(功能集群)组成。
▪ 聚合了自适应平台功能
▪ 定义了功能栈需求规范
▪ 从应用程序和网络角度描述软件平台的行为
▪ 但不限制最终在自适应平台中的具体软件架构设计

■ 架构设计原则:
1. CP AUTOSAR设计原则:
▪ CP AUTOSAR将于硬件相关的以及通用系统功能定义为BSW模块
▪ 应用功能定义为独立的软件组件SWC
▪ RTE分离SWC和BSW
▪ BSW可配置,并且可以被多个产品线的ECU重复使用
▪ 不开源
2. AP AUTOSAR设计原则:
▪ 遵循面向服务的架构SOA设计范式(理念)
▪ 充分利用其他领域软件成熟技术,重用软件市场成熟组件,缩短开发周期
▪ 充分利用各种开源软件
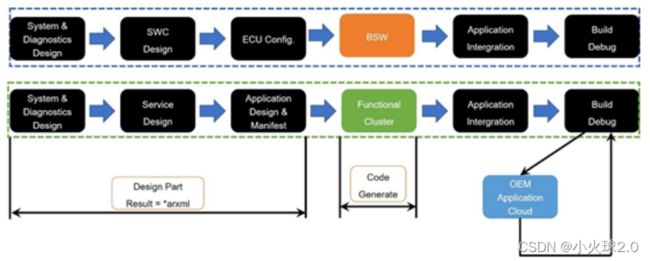
■ 开发流程
从开发流程来看,AP和CP都主要包括以下三个阶段:
▪ 设计阶段:设计ARXML
▪ 代码生成:基于ARXML生成代码
▪ 集成:集成Application,编译调试等
不同点
▪ 在AP AUTOSAR设计阶段,需要进行Service与Manifest的设计。
▪ CP则不用。CP需要进行ECU配置设计,而AP没有ECU配置这个设计项。
▪ 在代码生成时,CP是生成基础软件模块相关的代码,AP生成的是FC相关的代码和Manifest,需要注意的是,AP中不是所有的FC都会生成相关的代码和Manifest。(橙色是CP,绿色是AP)
■ 接口
▪ CP AUTOSAR常用的接口是Sender-Receiver,Client-Server等
▪ AP AUTOSAR常用的接口是Service Interface等
当设计CP AUTOSAR与AP AUTOSAR之间的通信时,需要进行信号到服务的转换设计,当前能提供该功能模块的只 有ETAS的Signal2Service Function Cluster。
Signal-2-Service功能集群:
▪ 从信号到服务(CP到AP)Signal2Service
▪ 从服务到信号(AP到CP)Service2Signal
■ 通信方式
▪ CP AUTOSAR是基于信号的通信,主要包括CAN、Lin、FlexRay等。
▪ AP AUTOSAR是面向服务的通信,支持基于以太网的SOME/IP、IPC、RPC等。
CP AUTOSAR虽然可以支持SOME/IP,但是CP AUTOSAR中SOME/IP只不过是把Sender-Receiver的CAN通信转换成了Client-Server的以太网通信,整个通信链路仍是静态配置的,并不是真正的面向服务的通信。
■ 调度方式
▪ CP AUTOSAR OS采用固定的任务调度配置。在OS Task中调度BSW Main Functions以及SWC的Runnable Entities,按既定规则顺序执行。并协同BSW Modules和App SWC的模式切换。
▪ AP AUTOSAR 支持多种动态调度策略,配置在运行时完成,配置信息在Manifest文件中体现。
▪ AP AUTOSAR中与调度相关的模块主要为执行管理(EM)和状态管理(SM),应用程序运行在Process、Thread中。
▪ CP AUTOSAR中,任务的调度周期可以到us级别。而AP AUTOSAR是在ms(一般是几十上百)级。
■ 状态管理
CP AUTOSAR 通过模式开关组件处理不同的状态:
▪ BSW模式(Network Online, Offline)
▪ Application模式(Normal等)
▪ Vehicle 模式(Active,Inactive)
AP AUTOSAR主要通过以下三种状态来进行状态管理:
▪ Function Group(FG)State:功能组状态
▪ Process State:进程状态,EM通过Function Group来改变Process State
▪ Execution State:进程的执行状态
■ 状态管理
CP状态管理

AP状态管理

■ Safety
1. CP AUTOSAR中的Safety机制主要有:
▪ 与OS相关的Safety机制:内存保护,时序保护,硬件保护
▪ E2E保护:End to End,端到端的通信保护,为防止通信链路中可能存在的故障HW/SW), 在 通信节点 之间 执行的 一种数据保护协议/机制。
▪ 看门狗管理器: Alive 监视, Deadline 监视, Logic 监视
▪ 硬件诊断: Core Test, RAM Test, Flash Test
2. AP AUTOSAR中ara::com支持E2E。
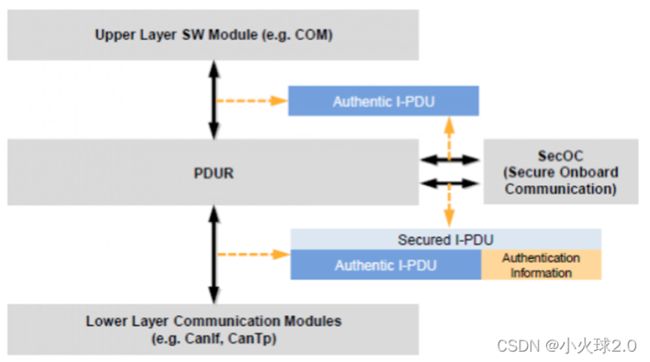
■ Security
1. CP AUTOSAR中的Security方案主要包括:
▪ SecOC:Secure Onboard Communication
▪ CSM:Crypto Service Manager
主要流程为:
▪ 添加/验证身份验证信息
▪ 实现上下层模块的接口
▪ 由PduR路由配置解决
▪ 维护缓冲区以存储和修改安全的I-PDU
2. AP AUTOSAR中与Security相关的模块主要为:
▪ ara::iam:身份验证管理
▪ ara::crypto:用于通用加密操作和安全密钥管理
-> 为Adaptive Application提供接口,负责加密原语的构建和监督
-> 提供了通过标准化接口访问加密算法的多种实现的基础结构
-> 该规范对加密堆栈的内部体系结构和实现没有任何限制
■ 时间同步
▪ CP AUTOSAR与时间同步相关的模块为StbM。
▪ AP AUTOSAR与时间同步相关的模块为ara::tsync
■ 开发语言
▪ CP AUTOSAR主要使用的是C语言,相关的标准是MISRA C
▪ AP AUTOSAR主要使用的是C++语言,相关的标准是ISO/IEC 14882:2014
■ 代码执行
▪ CP AUTOSAR上的应用程序直接从ROM执行代码
▪ AP AUTOSAR上的应用程序则是从持久性内存加载到RAM中运行
■ 地址空间
▪ CP AUTOSAR所有应用程序具有相同的地址空间,其Safety主要通过内存保护单元(MPU)支持。
▪ AP AUTOSAR上,每个应用程序都有自己的(虚拟)地址空间,这是通过内存管理单元(MMU)来支持的。
■ Update
▪ CP AUTOSAR自身是不支持OTA的,这就意味着要更新在CP AUTOSAR上运行的应用程序,就必须更新这个ECU的代码。通过其他控制器对运行CP AUTOSAR的控制器进行更新不算CP AUTOSAR自身的OTA。
▪ AP AUTOSAR是自身支持OTA的,AP AUTOSAR可以自己删除/更新/增加单个Application,而且AP AUTOSAR也可以更新某个功能集群(FC)的代码,只是这种用例比较少见。
■ 应用场景
▪ CP AUTOSAR一般应用在对实时性要求高、对功能安全要求高、对算力要求较低的场景中,如引擎控制、制动系统等。
▪ AP AUTOSAR一般应用在对实时性有一定要求、对功能安全有一定要求,对算力要求较高的场景中,如:
① 传感器融合处理、运行时动态更新
② 自动驾驶中
③ OTA