辅助驾驶功能开发-功能规范篇(22)-6-L2级辅助驾驶方案功能规范
1.3.6 ELK 系统功能定义
ELK全称Emergency Lane Keeping,即紧急车道保持。当车辆与道路边界护栏(包含隔离带护栏、路锥、水马) 有碰撞危险或当车辆正偏出道路边沿且存在“对向来车”或“后向来车”与本车有碰撞风险时,通过给与转向反力矩进行车辆横向运动介入控制,避免或减小碰撞的伤害。ELK系统包括基于道路边缘紧急纠偏,即ELK-re(Road Edge),基于对向来车的紧急纠偏,即ELK-o(Oncoming),基于超车道来车的紧急纠偏,即ELK-LCS (Overtaking)。
1.3.6.1 状态机
相应的状态机如下:

1.3.6.2 状态迁移表
| 初始状态 | 转移状态 | 转移条件 |
| NONE | Func_NoError | 系统自检、互检结果无故障 条件 1: 1) 控制器(毫米波雷达)初始化已正确完成; 2) 临时性系统硬件故障(毫米波雷达)未被检测到; 3) 前向毫米波雷达完成校准。 |
| NONE | Func_Error | 条件 2: 1) 不满足条件 1 中的任意一条; |
| Func_Off | Func_Passive | 条件 3: 1) 满足系统自检无错条件1; 2) 驾驶员手动打开 ELK 功能。 |
| Func_Idle_bo thsides | Func_Ready_lef t/Func_Ready_r ight | 可激活条件下的待机 条件 4: 1) 速度满足条件; 2) 探测到相关侧车道边界时; 3) 横摆角速率满足条件; 4) 车道宽度满足条件; 5) 车道曲率满足条件; 6) ABS 和 ESP 未激活; 7) EPS 就绪; 8) 方向盘转角速率小于解除阈值; 9) 驾驶员手力矩小于阈值。 |
| Func_Ready_L eft/Func_Ready_Right | Func_Active_Le ft/Func_Active_Right | 基本条件 5: 满足可激活待机条件 4。 条件 5.1 ELK-o 功能激活: 1) 左前轮边缘一定时间之后将穿越作用线; 2) 预测发生碰撞的时间 TTC 小于阈值; 3) 对向来车在两边相邻车道,且对向来车与本车左边缘的横向距离小于阈值,本车向目标车辆一侧偏离; 4) 同向车辆(速度低于本车),本车偏离本车道进入目标车道,与相邻车辆有碰撞风险。 条件 5.2 ELK-re 功能激活: 1) 左前轮边缘一定时间之后将穿越作用线; 2) 检测到本车往车道边界一侧偏移。 条件 5.3 ELK-LCS 功能激活: 1) 左前轮边缘一定时间之后将穿越作用线; 2) 在 BSD 区域(可标定)检测到目标车辆,且自车向目标车辆对应侧偏移 ,存在碰撞风险; 3) 在 LCA 区域检测到目标车辆,自车向目标车辆对应侧偏移 ,且碰撞时间 (TTC)小于 2.0 s(可标定),持续 500ms(可标定)。 |
| Func_Active_ left/ Func_Active_ Right | Func_Passive | 条件 6: 1) 纠偏完成; 2) 满足退出条件 7 中任一条; 3) 针对 ELK-O,检测到相关侧对向来车远离碰撞危险区或碰撞时间大于 3s (可标定); 4) 针对 ELK-re,检测到道路边缘消失; 5) 针对 ELK-LCS,检测到盲区 BSD,LCA 车辆远离碰撞危险区; 6) 针对 ELK-LCS,检测到并线辅助系统故障。 |
| Func_Ready_l eft/Func_Rea dy_Right | Func_Idle_both sides | 条件 7: 1) 速度过低; 2) 速度过高; 3) 自车道丢失:相关侧车道边界丢失时; 4) 横摆角速率过高; 5) 车道过宽; 6) 车道过窄; 7) 车道曲率过高; 8) ABS 和 ESP 作用:ABS 或 ESP 激活时; 9) 手力矩过大。 |
1.3.6.3 功能定义
1.3.6.3.1 信号需求列表
1.3.6.3.2 系统开启关闭
1)初始化
车辆上电后,系统(ELK)进行初始化,控制器需要在上电后 220ms 内发出第一帧报文,并在 3s 内完成内部自检,同时上电 3s 内不进行关联系统检测(上电 3s 内不报关联系统故障、不记录关联系统故障码)。
ELK 系统内部自检:自检时如果检测到前置智能摄像头无法支持 ELK 功能,则发送失效状态(FC_ELKMode=0x3: Failure),如果检测到前向毫米波雷达、侧向毫米波雷达无法支持 ELK,ELK 系统不失效,仅系统记录 DTC。仪表根据系统状态进行显示。自检完无故障时,ELK 状态根据上次掉电时的设置结果维持 OFF 状态或切换为(0x1:passive)。
ELK系统关联系统检测:ELK系统上电3s后,检测关联系统是否满足ELK功能正常工作要求。若不满足,则根据降级策略发送失效状态信号(FC_ELKMode=0x3:Failure),仪表根据系统状态进行显示;若互检无故障,ELK状态根据上次掉电时的设置结果维持OFF状态或切换为(0x1:passive)。
系统故障信息仅在系统处于开启状态下才发出。
2)系统开启/关闭
系统上电初始化完成后,即可通过HU软开关对“紧急车道保持”状态进行设置,具体设置要求如下:
① 紧急车道保持出厂默认关闭 ,系统需记忆上次掉电时的设置状态,在下次上电时,自动将 ACC_ELKEnableStatus 置为记忆值发出,HU 收到该信号后显示对应的设置状态;
② 系统上电初始化完成后,即可响应用户的设置需求:驾驶员通过 HU“紧急车道保持”软开关设置开启或关闭时,HU 将事件型信号“HU_ELKEnable”置为相应值(0x1=OFF;0x2=ON),并通过网关转发给 ACC。ACC 收到该信号并完成提示状态切换后,将周期性信号“FC_ELKEnableStatus”置为对应值(0x0=OFF;0x1=ON),并通过网关转发给 HU。HU 收到“FC_ELKEnableStatus”信号后,将 UI 界面“紧急车道保持”软开关置为对应状态。
③ ACC 接收到“HU_ELKEnable”为 Invalid、Inactive 或 reserved 时,不做任何处理,维持之前状态不变。
ACC 处于故障状态(非控制器硬件、通讯等故障,如关联系统故障导致的故障等)下,也能响应设置需求。故障恢复后,应根据用户最新设置的紧急车道保持状态切换到相应的状态。
当收到 ACC_IACCHWAMode=0x3 =active 时,系统控制将 ACC_ELKEnableStatus 后台置为打开。ACC_IACCHWAMode 不为 0x3 后,根据恢复为之前状态。
1.3.6.3.3 系统待机
当驾驶员通过HU开启ELK功能后,系统满足如下条件后自检成功,将ELK工作状态信号ACC_ELKMode=Passive。
1)自适应巡航控制器、车道偏离控制器初始化已正确完成;
2)ELK功能已被配置;
3)自适应巡航控制器系统硬件故障未被检测到;
4)自适应巡航系统控制器完成校准;
5)自适应巡航系统控制器无内部系统故障。
当本车运行状态满足如下条件时,系统进入可激活待机状态。
1)速度满足:ELK-LCS:40 km/h<表显车速<150 km/h、ELK-O:60 km/h<表显 车速<150 km/h、ELK-re:60 km/h<表显车速<150 km/h;
2)两侧车道线均被探测到且持续3s(可标定);
3)横摆角速率(精度补偿后)满足:ESP_YawRate < 0.20 rad/s;
4)车道宽度满足: 2.6 m< LaneWidth <5.2 m持续1s(可标定);
5)车道曲率满足: ACC_Road Curvature < 0.0033 m-1(可标定)持续4s;
6)ABS和ESP和AEB未激活:ESP_ESPactivestatus≠active且ESP_OnlyABSActive≠active且 ESP_TCSActive≠active且 ESP_VDCActive≠active且ACC_AEBActive≠active;
7)EPS就绪:EPS_LatCtrlAvailabilityStatus =0x1 =可接受控制;
8)方向盘转角速率SAS_SteeringAngleSpeed小于阈值;
9)驾驶员手力矩EPS_MeasuredTorsionBarTorque小于1.5Nm(可标定),持续0.5s(可标定)。
1.3.6.3.4 系统激活
紧急车道保持辅助的工作逻辑是:安装在车辆前挡风玻璃上方的摄像头实时监测识别前方两侧道路线的信息,系统根据实时接收ESP发出的CAN总线车速信号“ESP_VehicleSpeed”、偏航率信号“ESP_YawRate”及SAS方向盘角度信号“SAS_SteeringAngle”,并通过摄像头探测到的车辆离两边道路线的距离、前后雷达探测到邻车道的车辆等信息进行算法处理,针对不同的工况判断出车辆满足纠偏要求(1R1V+2R在前置摄像头完成)后发出纠偏转角请求,由EPS 进行纠偏。
1)ELK-o功能激活纠偏:
基于对向来车的紧急纠偏包括如下两种工况:
* 第一种是基于目标车与本车相向而行时,本车向目标车一侧偏离,有碰撞风险。
* 第二种是基于目标车与本车同向而行时,目标车先前位于本车前方,后续目标车减速后,本车向目标车一侧偏离,有碰撞风险。

(a) 目标车与本车相向而行 (b)目标车与本车同向而行
当系统满足如下基本激活条件后,ELK-O功能将被激活,相应的信号位FC_ELKInterventionMode=Oncoming,相应的系统状态将从FC_ELKMode=Passive跳转至active状态。
激活条件如下:
① 左/右前轮边缘0.7s(可标定)之后将穿越作用线(作用线是一条虚拟线,距离车道边界线的内边缘约25cm)时触发此事件;
② 预测发生碰撞的时间TTC小于2s(可标定);
③ 对向来车在两边相邻车道,且对向来车与本车左边缘的横向距离小于1m(可标定或使用查表方式不同车速对应不同距离),本车向目标车辆一侧偏离;
④ 同向车辆(速度低于本车),本车偏离本车道进入目标车道,与目标车辆有碰撞风险;
当ELK-O激活过程中,无论驾驶员是否打开转向灯准备变道,系统均发出纠偏转角请求 (FC_LatAngReqActive=0x1:Active及FC_LatAngReq为有效)给EPS执行纠偏。
2)ELK-re功能激活纠偏:
当系统满足如下基本激活条件后,ELK-re功能将被激活,相应的信号位FC_ELKInterventionMode= Road edge, 相应的系统状态将从FC_ELKMode=Passive跳转至active状态。激活条件如下:
1、左/右前轮边缘 0.7s(可标定)之后将穿越作用线(作用线是一条虚拟线,距离车道边沿的内边缘约 20 cm)时触发此事件;
2、检测到本车往车道边界一侧偏移。
当ELK-re激活过程中,无论驾驶员是否打开转向灯准备变道,系统均发出纠偏转角请求 (FC_LatAngReqActive=0x1:Active及FC_LatAngReq)给EPS执行纠偏。
3)ELK-LCS功能激活纠偏:
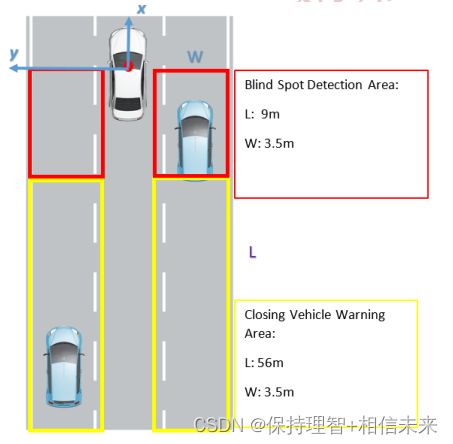
基于后向盲区紧急车道保持包括两个紧急程度,第一种后车进入本车BSD(blind spot detection area)盲区, 若本车偏向超车道车辆,则要求系统必须执行纠偏, 具体执行纠偏时机通过接收并线辅助控制器 的 BSD/LCAAlertForELK信号进行判断。第二种后车进入本车LCA(Lane change assist area)区域,若本车偏向超车道车辆,则系统通过接收并线辅助控制器的BSD/LCAAlertForELK信号,执行ELK-LCS纠偏。
当系统满足如下基本激活条件后,ELK-LCS功能将被激活,相应的信号位FC_ELKInterventionMode= Overtaking,相应的系统状态将从FC_ELKMode=Passive跳转至active状态。
激活条件如下:
① 左前轮边缘 0.7s(可标定)之后将穿越作用线(作用线是一条虚拟线,距离车道边界线的内边缘约 25 cm) 时;
② 在 BSD 区域(可标定)检测到车辆,相应的盲区 BSD 监测信号 LCDAR_Left_ELK_oAlert=0x1:level 1/LCDAR_ELK_oAlert=0x1:level 1 或 LCDAR_Left_ELK_oAlert=0x2:level 2/LCDAR_ELK_oAlert=0x2:level 2,自车向目标车辆对应侧偏移时,系统激活紧急车道保持功能;
③ 在 LCA 区域检测到车辆,LCDAR_Left_ELK_oAlert=0x1:level 1/LCDAR_ELK_oAlert=0x1:level 1 或 LCDAR_Left_ELK_oAlert=0x2:level 2/LCDAR_ELK_oAlert=0x2:level 2,自车向目标车辆对应侧偏移,系统激活紧急车道保持功能;
当 ELK-LCS 激活过程中,无论驾驶员是否打开转向灯准备变道,系统均发出纠偏转角请求 (FC_LatAngReqActive=0x1:Active及FC_LatAngReq)给EPS执行纠偏。此功能的开关设置逻辑与“紧急车道保持” HU软开关设置保持一致,当并线辅助控制器LCDAR_Left_ELK_oAlert/LCDAR_ELK_oAlert信号丢失或无效时,此功能失效,不报故障,但记录DTC。
1.3.6.3.5 系统抑制
ELK系统进行纠偏过程中,出现如下情况,ELK状态信号(FC_ELKMode)保持Active,但不发送纠偏使能请求,直到抑制条件解除。
基础抑制条件(满足以下抑制条件至少一项时,系统不可以激活):
1)驾驶员手力矩超过1.5Nm(可标定)持续3s(可标定);
2)车道过宽:LaneWidth > 5.5m(可标定)持续3s(可标定);
3)车道过窄:LaneWidth < 2.5m(可标定)持续3s(可标定);
4)精度补偿后的横摆率YawRate > 0.25 rad/s(可标定)持续5s(可标定);
5)当前车道曲率过高: LaneCurvature > 0.004 m-1(可标定)持续2s(可标定);
6)车道线丢失:ELK-O和ELK-LCS至少有一侧车道线持续3 s(可标定)未被探测到时;
7)ABS 或 ESP 或 AEB 激活 ESP_ESPactivestatus=active 或 ESP_OnlyABSActive =active 或 ESP_TCSActive =active 或 ESP_VDCActive=active或ACC_AEBActive=active;
8)EPS未就绪(EPS_LatCtrlAvailabilityStatus=0x0=无故障但不可用)时,系统进入不可激活待机,EPS 就绪(EPS_LatCtrlAvailabilityStatus =0x1 =可接受控制)时,系统激活;
9)方向盘转角速率SAS_SteeringAngleSpeed大于解除阈值;
10) 自车速度:表显车速>155 km/h或[表显车速<35 km/h(ELK-LCS)、表显车速<55 km/h(ELK-O、ELK-re)]。
1.3.6.3.6 系统显示
TBD
1.3.6.3.7 系统设置
ELK出厂时默认关闭,当用户打开系统时,将弹出一个对话框提醒驾驶员系统的局限和使用注意事项,驾驶员确认后才能打开系统。
ELK待机状态下,不做图标显示。
在各个纠偏功能激活时,相应的显示需求如下:
1)针对ELK-O,相应的显示方案如下:
系统发送仪表信号FC_ELKInterventionMode= Oncoming,仪表点亮重构的目标来车,并增加报警提示音。
将“FC_HostLaneLeftStatus”/“FC_HostLaneRightStatus”信号置为左/右侧纠偏“0x2:Intervention”状态通过CAN总线发送给仪表,仪表接收到信号后显示纠偏状态,右侧(或左侧)车道线为黄色。
2)针对ELK-re,相应的显示方案如下:
系统发送仪表信号FC_ELKInterventionMode= Road edge,仪表点亮的目标车道边缘线,并增加报警提示音。
将“FC_HostLaneLeftStatus”/“FC_HostLaneRightStatus”信号置为左/右侧纠偏“0x2:Intervention”状态通过CAN总线发送给仪表,仪表接收到信号后显示纠偏状态,右侧(或左侧)车道线为黄色。
3)针对ELK-LCS,相应的显示方案如下:
系统发送仪表信号FC_ELKInterventionMode=Overtaking,仪表点亮重构后方超车道车辆,并增加报警提示音。
将“FC_HostLaneLeftStatus”/“FC_HostLaneRightStatus”信号置为左/右侧纠偏“0x2:Intervention”状态通过CAN总线发送给仪表,仪表接收到信号后显示纠偏状态,右侧(或左侧)车道线为黄色。
1.3.6.3.8 系统退出
当系统处于激活状态时,满足以上1.3.7.3.5中抑制条件(1-10)中任一条件后,触发ELK抑制并退出。如果以上条件未触发,当满足以下任一条件后,ELK退出相应的紧急纠偏状态至待机。
1)自车速度:表显车速>155 km/h或[表显车速<35 km/h(ELK-LCS)、表显车速<55 km/h(ELK-O、ELK-re)];
2)针对ELK-O激活状态时,检测到相关侧对向来车远离碰撞危险区或碰撞时间大于3s(可标定);
3)针对ELK-re激活时,检测到道路边缘消失;
4)针对 ELK-LCS 激活时,检测到盲区 BSD , LCA 车辆远离碰撞危险区或 TTC 大 于 3.0s ( 可标定 ),即 LCDAR_Left_ELK_oAlert/LCDAR_ELK_oAlert=0x0:No warning;
5)针对ELK-LCS激活时,检测到并线辅助系统故障。
1.3.6.3.9 系统失效
ELK系统失效存在两种情况,一种是实现ELK系统的硬件出现问题,无法支持,另外一种是支持ELK系统的关联部件出现故障或失效,无法满足ELK需求。
1) 关联系统失效
| 序号 | 关联系统问题 | ELK 系统处理逻辑 | 失效是否可恢复 |
| 1 | 前吹风模式无效或丢失时 | 系统正常工作,不失效 | - |
| 2 | 前雨刮工作状态无效或丢失时 | 系统正常工作,不失效 | - |
| 3 | 时间信号无效或丢失时 | 系统正常工作,不失效 | - |
| 4 | EPS 当前状态信号无效或丢失时 | ELK 系统失效,记录 DTC | 可恢复 |
| 5 | ELK 模式选择信号无效或丢失时 | 系统正常工作,不失效 | - |
| 6 | TCU 信号无效信号丢失时 | ELK 系统失效,记录 DTC | 可恢复 |
| 7 | 发动机运行状态异常或信号丢失 | ELK 系统失效,记录 DTC | 可恢复 |
| 8 | 里程信号 | 系统正常工作,不失效 | - |
| 9 | ESP 轮速,车速相关信号异常或信号丢失 | ELK 系统失效,记录 DTC | 可恢复 |
| 10 | SAS 相关信号异常或丢失 | ELK 系统失效,记录 DTC | 可恢复 |
| 11 | 总线 BUS OFF | ELK 系统失效,记录 DTC | 可恢复 |
2) 系统相关硬件故障
| 序号 | 系统硬件问题 | ELK 系统处理逻辑 | 失效是否可恢复 |
| 1 | 雷达失明,未校准(含后侧雷达遮挡或未标定) | ELK 记录 DTC,仅失明或未校准雷达对应功能失效,系统其余功能正常工作,同时发出提示信息 | 是 |
| 2 | 摄像头失明,未校准 | ELK 记录 DTC,仅对应功能失效 | 是 |
| 3 | 雷达控制器(含后侧雷达)故障 | ELK 记录 DTC,仅故障雷达对应功能失效,系统其余功能正常工作,同时发出提示信息 | 是 |
| 4 | 摄像头控制器故障 | ELK 记录 DTC,仅对应功能失效 | 是 |
3)失效特殊处理逻辑
① 当发动机处于 EMS_EngineStatus=stop,crank 状态,或发动机从 crank 到 running 后 5 秒,系统不监控轮速信号,轮速方向和轮速脉冲信号。
② 车速≤1km/h 时,AEB 系统不监控轮速及轮速方向信号。
③ 摄像头检测到失明时,系统 5 分钟后报失效,记录 DTC 且本点火周期内可恢复;5 分钟内,各基于摄像头探测结果的功能根据目标探测结果按照原逻辑执行提示、报警、控制等;10 分钟后永久失明,报失效且记录 DTC。