【AI赋能】人工智能在自动驾驶时代的应用
自我介绍
我是秋说,研究 人工智能、大数据 等前沿技术,传递 Java、Python 等语言知识。

主页链接:秋说的博客
学习专栏推荐:
人工智能:创新无限
MySQL进阶之路
C++刷题集
网络安全攻防姿势总结
【从0开始 深度掌握】C程序设计
欢迎点赞 收藏⭐ 留言
引言
✈️ 人工智能引领现代,智能AI赋能未来。它在当今社会和科技领域中具有重要性。
✒️本文将着重探讨人工智能对自动驾驶技术的深度赋能和应用场景等。
✈️文章目录
-
- 1️⃣什么是自动驾驶与AI算法
- 2️⃣关键AI技术在自动驾驶中的应用
-
- 1.机器学习
- 2.神经网络
- 3.自然语言处理
- 4.深度学习
- 5.AI算法
- 3️⃣总结
1️⃣什么是自动驾驶与AI算法
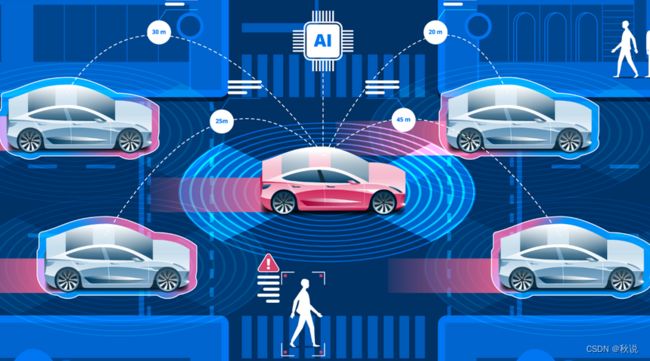
有时我们乘坐网约车的时候,能打到无人驾驶汽车,全程均为AI语音播报:

自动驾驶是指通过使用 各种传感器 、计算机视觉 、深度学习 等技术,使得车辆自主进行导航、感知环境、做出决策并安全地行驶
它的目标是提高道路交通的效率、改善驾乘体验,并为出行提供便捷的解决方案。
❔那什么是AI算法呢?两者之间的关系又是什么?
AI算法就像是人工智能的 “大脑”,它是一系列的计算方法,用来处理输入的数据并产生输出结果。可以把它想象成解决问题的数学和逻辑方法。
在自动驾驶技术中,AI算法起到了至关重要的作用。
例如,计算机视觉算法 用于解析车辆摄像头捕捉到的图像,识别和跟踪道路、车辆、行人等物体。

目标检测算法 可以帮助自动驾驶汽车准确地识别和定位周围的障碍物,并采取相应的避让动作。
因此,AI算法是自动驾驶技术中的核心组成部分 ,通过对感知、理解和决策过程的优化,实现了自动驾驶汽车的安全高效驾驶。
❗可以说,没有AI算法,就没有自动驾驶。
2️⃣关键AI技术在自动驾驶中的应用
人工智能引领现代,智能AI赋能未来。
接下来,我们将详细介绍人工智能技术中 自然语言处理️、计算机视觉、深度学习➿ 、机器学习⚙️ 等关键技术在自动驾驶系统中的应用。

1.机器学习
机器学习在车辆感知领域的应用主要包括物体检测与识别 。通过提供标注好的图像数据,机器学习算法可以学习到各种物体的特征,并准确地将它们区分开来。
♀️在自动驾驶汽车上,机器学习技术帮助车辆识别行人、路障、斑马线等,实现自动化减速等行为。
️同时,机器学习可用于训练模型来进行决策和规划 ,例如在复杂交通场景下选择最佳的行驶路线和速度。 通过对历史驾驶数据的学习,模型能够预测可能的道路状况和其他车辆的行为,并做出最优决策。
2.神经网络
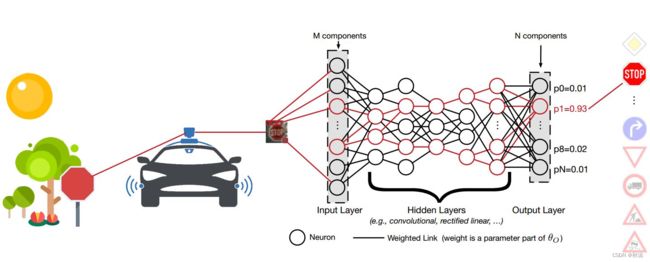
自动驾驶技术中,使用到了循环神经网络 和 深度神经网络技术。它们主要用于处理序列数据,如车辆传感器的时间序列数据。
通过对过去和当前的传感器数据进行建模和预测,可以实现路径规划和决策。

⤴️⤵️同时,它们也可用于物体识别 ,如图为深度神经网络对路牌识别的应用:
3.自然语言处理
️自然语言处理是人工智能领域的一个重要子领域,旨在 使计算机能够理解和处理人类的自然语言。
通俗来说,自然语言处理就是让计算机懂得人类语言,并与人类进行交互。
⚙️它可以让我们与自动驾驶汽车进行交互。我们说话之后,语音输入将被转化为文本,从而让车辆执行相应的操作。
❔如图为一种基于自然语言处理的问答流程:

☀️同时,基于自然语言处理构建的智能助手可以根据情境提供相应的建议。例如提供 交通状况、路线导航、天气情况❄️ 等信息。

像我们日常使用的 Siri、小布、小爱同学,都是应用自然语言处理技术的新一代AI模型。

✉️自然语言处理还可以用于处理接收到的消息,例如邮件或媒体消息。它可以帮助车辆分类重要的消息,并将关键信息传达给我们。
4.深度学习
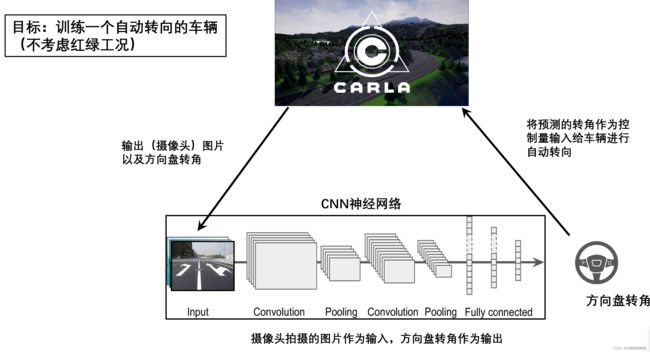
深度学习在图像处理方面发挥着关键作用。通过深度卷积神经网络(CNN),可以提取图像中的特征,例如 边缘、纹理 和 颜色等,帮助自动驾驶系统感知周围环境。
我们具体来讲一讲卷积神经网络的原理:
卷积神经网络主要分为三个层一个数:卷积层、池化层、激活函数、全连接层。
卷积层使用一组可学习的过滤器在输入数据上滑动,计算它们与输入数据的卷积结果,因此来提取输入数据中的局部特征。
✂️卷积层之后为池化层。池化层通过减小特征图的尺寸,同时保留重要的特征信息。

在卷积层和池化层之间,我们应用激活函数来引入非线性。它可以将卷积层输出的线性特征映射到非线性空间中,从而增强了网络的表达能力。
在全连接层中,特征图被展平成向量,并与权重矩阵相乘,得到最终的输出结果。全连接层可以将低级的局部特征组合成更高级的抽象特征,用于分类或回归等任务。
看不懂?没事,我举个例子你就懂了:
在自动驾驶汽车中,摄像头通常用于感知环境并捕捉道路图像。
通过卷积操作,CNN可以检测道路的边缘、车辆、行人等。
♂️接下来,在池化层中,CNN通过减小尺寸来保留重要的特征信息。比如,在道路的某个位置可能存在多个车辆,池化操作可以将这些信息合并,减少冗余。

♀️然后,在激活函数的作用下,CNN将线性特征映射到非线性空间。这有助于程序更好地理解图像中的复杂模式和特征。例如,行人的微小细节和变化均被捕获。
最后,全连接层将提取的特征进行组合和分类。例如,它可用于判断图像中是否存在行人、车辆,并输出相应的决策结果。
如图为CNN在自动转向上的应用:
综上,卷积神经网络能够有效地提取输入数据的特征,并应用于图像分类、目标检测 等计算机视觉任务。
5.AI算法
️接下来,我们细致讲一下自动驾驶中的轨迹规划算法。它基于感知到的环境信息,通过路径搜索来生成适当的行驶路径。
最常见的是Dijkstra算法,举个例子介绍一下它:
假设我们有一幅道路网络图,其中每个节点代表一个道路交叉口,每条边代表两个节点之间的道路段。每条边都有相应的权重,表示从一个节点到另一个节点的行驶代价,如距离、交通拥堵情况等。
现在,无人汽车从起点A出发,需要到达终点B。我们希望找到一条从起点到终点的最短路径,即经过的边的权重之和最小。

Dijkstra算法的基本步骤如下:
将A加入到一个待处理节点集合中,并设置A的初始距离为0,其他节点的初始距离为无穷大。
⚙️从待处理节点集合中选择距离最小的节点作为当前节点,然后,对当前节点的所有相邻节点进行松弛操作。
✏️计算通过当前节点到达该相邻节点的距离。如果通过当前节点到达相邻节点的距离小于该相邻节点当前的距离,则更新相邻节点的距离。
重复步骤2和步骤3,直到找到终点B。
因此,最短的路径为A->E->B,权重为7.9
对于大规模的道路网络图,需要使用优化的数据结构和算法来加速Dijkstra算法的执行过程。
3️⃣总结
✈️AI的发展和成熟为自动驾驶技术带来了巨大的推动力。
未来,自动驾驶将成为安全、高效和舒适出行的代名词,同时对交通方式和城市规划产生深远的影响。
✔️AI的加持发展将进一步释放自动驾驶技术的活力,为我们创造更美好的出行体验。
