PCL三维重建教程_点云基础篇(认识、读取加载显示、输出保存点云、附赠点云类型转换) C++
讲在前面:
本教程类似于教会你加减乘除(点云基础、分割、滤波、配准),然后自己做一道包含加减乘除的综合题(实践操作)。
此教程用最简单的例程,给大家直观感受。就像做一道物理大题,我们总用理想情况,便于理解学习。因此,所有的示例都围绕斯坦福的小兔子展开。
我不会带你们看官方文档,而是用自己的想法和语言来表达,目的是让一头雾水的人会去应用。毕竟我知道,做这个的大多数人,也只是为了应用,如果去深究原理,必然也不会来到这里。很多东西,我们只会应用就会“高人一等”,原理重要吗?重要!但对于大多数人来说,没有必要。司机并不一定知道汽车内部是什么结构,怎样运行的,他只需要会开车。没错,所以我们只能是司机,但对于我们来说,足够了。在我看来学会了应用,才会去学习更深层次的东西。当你不知原因打印出一个"hello world!",那种神秘和兴奋,会引导你去想弄清楚,这到底是为什么。
先去吃个饭,一会再写:)
前提准备:
首先说明我的环境:win10 +visual studio 2013 +PCL1.8.0
如果你使用其他版本,只要配置好了,也没有什么问题。
如果你还没有配置好环境,请看以下文章。
点我配置环境!
此外需要你有一定的c/c++,或是其他任意一门语言基础。
真的只需要基础就可以,这方面课程也比较多,请先自行去学习。
示例斯坦福兔子下载
ヾ( ̄ー ̄)X
进入正题!
首先,我们认识一下点云。
点云,字面来看,是很多点组成的云?云是千变万化的,大量的点的千变万化也组成了不同的形状。
现在跟我想,我们写txt文件的时候,可以把输入的一个字符看做一个基本单位。
那在pcd文件中呢?就是一个点,但这个点不一般。它有位置和颜色。
下面,我打开一个点云兔子pcd文件。
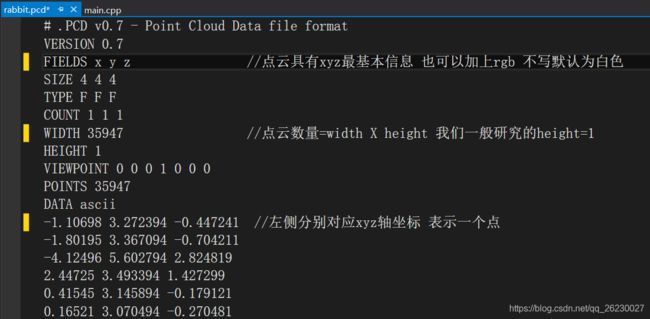
读取加载显示点云:
我怎么把这个点云可视化呢?
示例一:
#include首先我们要引用头文件,头文件中是别人写好的一些代码。
因为我们不会写(造积木)!我们看似在敲代码,
不过只是在用别人的积木,组建出不一样的东西罢了。
使用命令空间,可以让代码看起来简洁。
不使用的话 main函数里第一句则为
pcl::PointCloud<pcl::PointXYZ>::Ptr my_cloud(new pcl::PointCloud<pcl::PointXYZ>);
很长且眼花缭乱!
效果如下:
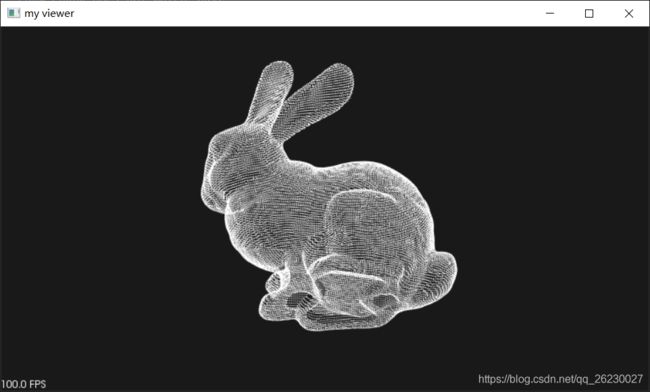
有两种方式,我们不要深究区别,不要忘了我们现在的目的,只是想看到点云而已。
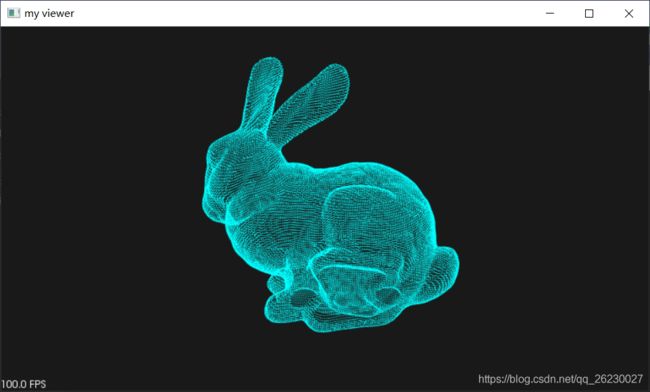
第二种:
可以修改显示的点云颜色
#include 
输出保存点云:
#include由于保存太简单,无非多了以下代码。
pcl::io::savePCDFile("new_rabbit.pcd", *cloud);
我决定学一赠一,教大家点云类型转换。
具体内容仔细看注释即可。
如XYZRGB到XYZ 实质就是丢掉RGB信息,我们只需要一个把原来的点云XYZ信息赋值给新点云,不赋值RGB即可。
上面的例子是把XYZ到XYZRGB,赋值XYZ信息后,又加上了藏青色(应该是这个色吧)。
效果如下:
可以不收藏,不关注,但请点个赞