【界面】yolov8+pyqt5进行目标识别
解决问题:通过pyqt5进行界面设计,调用yolov8模型对目标进行检测。
文章目录
- 工具
- 准备工作
-
- 获取Onnx模型
- 核心代码
- 运行结果
- 源代码路径:
工具
语言:
python
主要库:
pyqt5
检测模型:
yolov8
准备工作
获取Onnx模型
from ultralytics import YOLO
if __name__=='__main__':
# Create a new YOLO model from scratch
model = YOLO("yolov8s.yaml")
# Load a pretrained YOLO model (recommended for training)
model = YOLO("yolov8s.pt")
# # Train the model using the 'coco128.yaml' dataset for 3 epochs
# results = model.train(data='coco128.yaml', epochs=3,batch=1,workers=1,imgsz=416)
# # Evaluate the model's performance on the validation set
# metrics = model.val()
# # Export the model to ONNX format
success = model.export(format='onnx', opset=12, imgsz=416)
注意: 转换模型可能会出现如下报错:
ONNX: export failure: Exporting the operator silu to ONNX opset version 12 is not support
解决: onnx不支持silu:因此找到python(相对应的环境envs)路径/Lib/site-packages/torch/nn/modules/activation.py:
重写394行
def forward(self, input: Tensor) -> Tensor:
# 原始
# return F.silu(input, inplace=self.inplace)
# 重写
return input * torch.sigmoid(input)
核心代码
import time, cv2
from PyQt5 import QtCore, QtGui, QtWidgets
from PyQt5.QtCore import *
from PyQt5.QtGui import *
from PyQt5.QtWidgets import QFileDialog, QMainWindow
from PyQt5.QtCore import QTimer, QDateTime
from PyQt5.Qt import QThread, pyqtSignal, QMutex
import qimage2ndarray
from queue import Queue
from Project import Ui_Form
from infer import *
video_steam = Queue()
# Create an argument parser to handle command-line argumentss
def getArgs():
parser = argparse.ArgumentParser()
parser.add_argument('--model', type=str, default='yolov8s.onnx', help='Input your ONNX model.')
parser.add_argument('--conf-thres', type=float, default=0.5, help='Confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.5, help='NMS IoU threshold')
args = parser.parse_args()
# Check the requirements and select the appropriate backend (CPU or GPU)
check_requirements('onnxruntime-gpu' if torch.cuda.is_available() else 'onnxruntime')
return args
class Thread1(QThread): # 线程1
# 使用自定义信号,一定要记得信号是类变量,必须在类中定义,不能在实例方法中定义,
thread1_signal2 = pyqtSignal(object) #定义信号,定义参数为object类型
def __init__(self):
super(Thread1, self).__init__()
self.t = 0
self.Image_thread1 = None
self.mutex = QMutex() # 创建线程锁
self._isPause = False
def run(self):
while True:
self.mutex.lock() # 加锁
time.sleep(0.001) # 休眠
_, frame = cap.read()
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
self.Image_thread1 = frame
self.thread1_signal2.emit(self.Image_thread1) # 传信号
self.mutex.unlock() # 解锁
class Thread2(QThread): # 线程2
thread1_signal3 = pyqtSignal(object)
def __init__(self):
super(Thread2, self).__init__()
self.t = 0
self.Image_thread1 = None
self.mutex = QMutex()
self._isPause = False
self.video_flag = 0
def run(self):
while True:
self.mutex.lock()
time.sleep(0.001)
# time.sleep(1 / self.a) 在这里改帧率
_, frame = cap.read()
args = getArgs()
# Create an instance of the Yolov8 class with the specified arguments
detection = Yolov8(args.model, frame, args.conf_thres, args.iou_thres)
# Perform object detection and obtain the output image
frame = detection.main()
frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
if self.video_flag == 0:
video_steam.put(frame)
self.Image_thread1 = frame
self.thread1_signal3.emit(self.Image_thread1)
self.mutex.unlock()
class PyQtMainEntry(QMainWindow, Ui_Form):
def __init__(self):
super().__init__()
self.setupUi(self)
self.mark = 0
self.btnReadImage.clicked.connect(self.btnReadImage_Clicked)
self.btnShowCamera.clicked.connect(self.btnOpenCamera_Clicked)
self.btnStartLabel.clicked.connect(self.startRecognize)
self.btnSaveResult.clicked.connect(self.resultsave)
self.time()
def btnReadImage_Clicked(self):
self.mark = 0
filename, _ = QFileDialog.getOpenFileName(self, '打开')
if filename:
self.captured = cv2.imread(str(filename))
self.captured = cv2.cvtColor(self.captured, cv2.COLOR_BGR2RGB)
rows, cols, channels = self.captured.shape
bytesPerLine = channels * cols
QImg = QImage(self.captured.data, cols, rows, bytesPerLine, QImage.Format_RGB888)
self.Videolabel.setPixmap(QPixmap.fromImage(QImg).scaled(
self.Videolabel.size(), Qt.KeepAspectRatio, Qt.SmoothTransformation))
self.Videolabel.setScaledContents(True)
def btnOpenCamera_Clicked(self):
self.mark = 1
self.process_thread = Thread2()
self.process_thread.thread1_signal3.connect(self.thread2_work2)
self.preview_thread = Thread1()
self.preview_thread.thread1_signal2.connect(self.thread1_work2)
self.preview_thread.start()
def thread1_work2(self, img):
self.Image = img
qimg = qimage2ndarray.array2qimage(img)
self.Videolabel.setPixmap(QPixmap(qimg))
self.Videolabel.show()
self.Videolabel.setScaledContents(True)
def thread2_work2(self, img):
self.Image = img
qimg = qimage2ndarray.array2qimage(img)
self.DetectImagelabel.setPixmap(QPixmap(qimg))
self.DetectImagelabel.show()
self.DetectImagelabel.setScaledContents(True)
self.Videolabel_2.setPixmap(QPixmap(qimg))
self.Videolabel_2.show()
self.Videolabel_2.setScaledContents(True)
def startRecognize(self):
if self.mark == 0:
img = self.captured
args = getArgs()
# Create an instance of the Yolov8 class with the specified arguments
detection = Yolov8(args.model, img, args.conf_thres, args.iou_thres)
# Perform object detection and obtain the output image
draw_1 = detection.main()
self.result = draw_1
draw_2 = qimage2ndarray.array2qimage(draw_1)
self.DetectImagelabel.setPixmap(QPixmap(draw_2))
self.DetectImagelabel.setScaledContents(True)
self.DetectImagelabel.show()
else:
self.process_thread.start()
# 显示时间
def showCurrentTime(self, timeLabel):
time = QDateTime.currentDateTime()
self.timeDisplay = time.toString('yyyy-MM-dd hh:mm:ss dddd')
timeLabel.setText(self.timeDisplay)
def time(self):
self.timer = QTimer()
self.timer.timeout.connect(lambda: self.showCurrentTime(self.label_2))
self.timer.start()
def resultsave(self):
path_filename = QFileDialog.getExistingDirectory(self, '结果保存')
if path_filename:
self.saveImage = cv2.cvtColor(self.result, cv2.COLOR_RGB2BGR)
cv2.imwrite(path_filename + '/' + self.timeDisplay[:10]
+ '_' + str(10) + '.png', self.saveImage)
# 显示路径
self.PathLineEdit.setText(path_filename)
if __name__ == "__main__":
import sys
app = QtWidgets.QApplication(sys.argv)
cap = cv2.VideoCapture(0)
window = PyQtMainEntry()
window.show()
sys.exit(app.exec_())
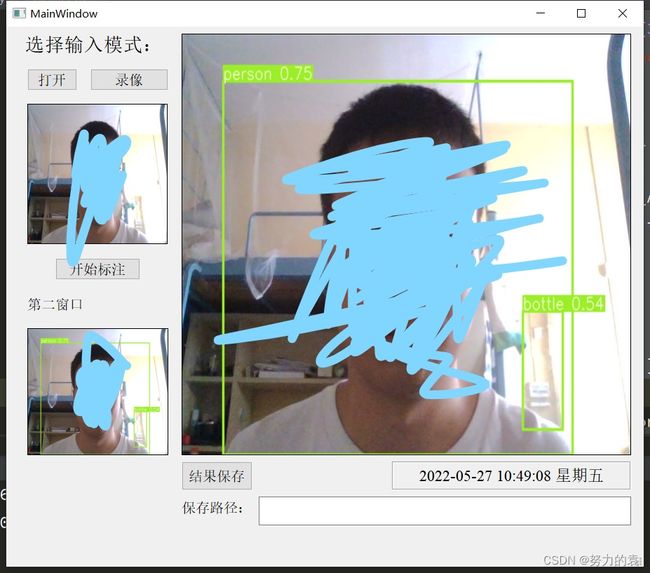
运行结果
对图片进行识别:

调用摄像头进行检测:
源代码路径:
https://download.csdn.net/download/qq_44747572/87868623
