ROS学习——运行管理
ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现:
可能包含多台主机;
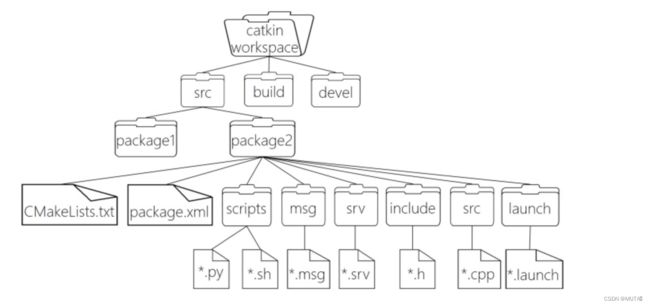
每台主机上又有多个工作空间(workspace);
每个的工作空间中又包含多个功能包(package);
每个功能包又包含多个节点(Node),不同的节点都有自己的节点名称;
每个节点可能还会设置一个或多个话题(topic)...
 一、ROS元功能包
一、ROS元功能包
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
1.概念&作用
概念:MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
作用:方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
2.实现
①新建功能包
不用添加依赖,因为这是一个虚包,没有实质内容。
②修改package.xml
(1)添加可执行依赖
被集成的功能包 (2)添加实现

③修改cmakelist.txt

删除其余代码,添加第四行
CMakeLists.txt 中不可以有换行
二、ROS节点管理launch文件
1.概念&作用
概念:launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用:简化节点的配置与启动,提高ROS程序的启动效率。
2.使用流程(turtlesim案例)
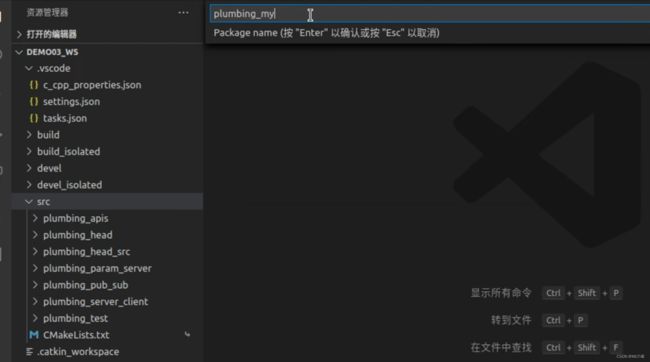
①新建功能包


②在功能包下新建文件夹--->文件夹下新建文件

③编辑内容

pkg------->启动节点的功能包
type------->启动节点的类型
name------>启动节点设置的名称
output------->日志的输出目标
④启动
roslaunch 包名 xxx.launch注意:roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
3.launch文件标签之launch
①属性(deprecated)
deprecated = "弃用声明"告知用户当前 launch 文件已经弃用

如果强行使用,会出现警告

②子级标签
所有其它标签都是launch的子级
4.launch文件标签之node
①属性
-
pkg="包名"
节点所属的包
-
type="nodeType"
节点类型(与之相同名称的可执行文件)
-
name="nodeName"
节点名称(在 ROS 网络拓扑中节点的名称)
-
args="xxx xxx xxx" (可选)
将参数传递给节点
-
machine="机器名"
在指定机器上启动节点
-
respawn="true | false" (可选)
如果节点退出,是否自动重启(例如关闭乌龟窗口后会自动重启打开,除除非直接关闭整个ros系统,在命令行ctlr+c)
-
respawn_delay=" N" (可选)
如果 respawn 为 true, 那么延迟 N 秒后启动节点
-
required="true | false" (可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
-
ns="xxx" (可选)
在指定命名空间 xxx 中启动节点(设置节点(my_turtle)的命名空间(hello)),这样操作可以避免重名
![]()

-
clear_params="true | false" (可选)
在启动前,删除节点的私有空间的所有参数
-
output="log | screen" (可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
②子级标签
-
env 环境变量设置
-
remap 重映射节点名称
-
rosparam 参数设置
-
param 参数设置
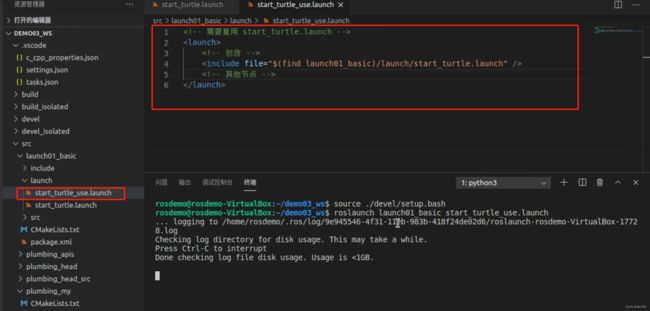
5.launch文件标签之include
include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
①属性
-
file="$(find 包名)/xxx/xxx.launch"
要包含的文件路径
案例: 复用start_turtle.launch
-
ns="xxx" (可选)
在指定命名空间导入文件
②子级标签
-
env 环境变量设置
-
arg 将参数传递给被包含的文件
6.launch文件标签之remap
用于话题重命名
①属性
-
from="xxx"
原始话题名称
-
to="yyy"
目标名称
sudo apt-get install ros-noetic-teleop-twist-keyboard
②子级标签
- 无
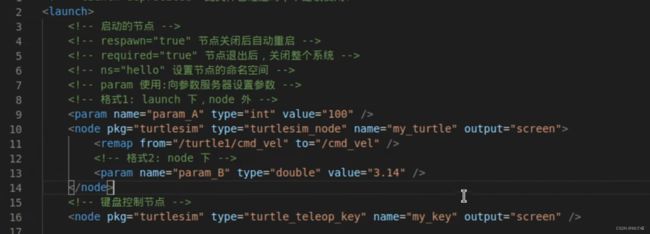
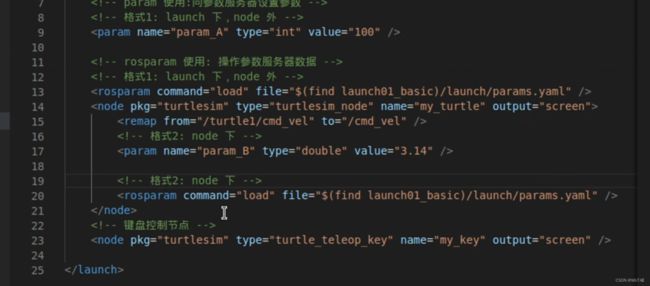
7.launch文件标签之param
标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在
①属性
-
name="命名空间/参数名"
参数名称,可以包含命名空间
-
value="xxx" (可选)
定义参数值,如果此处省略,必须指定外部文件作为参数源
-
type="str | int | double | bool | yaml" (可选)
指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下:
-
如果包含 '.' 的数字解析未浮点型,否则为整型
-
"true" 和 "false" 是 bool 值(不区分大小写)
-
其他是字符串
-
②子级标签
- 无
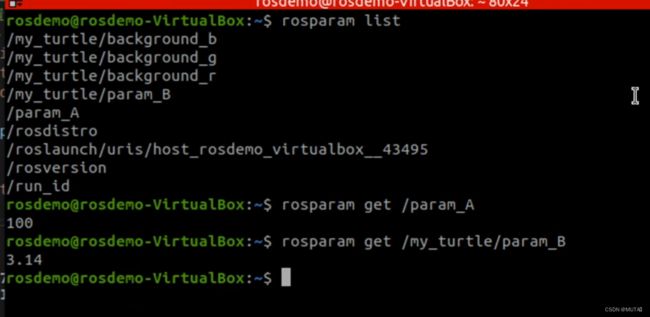
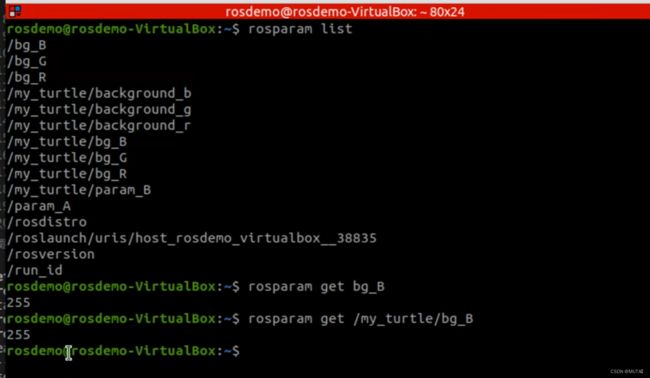
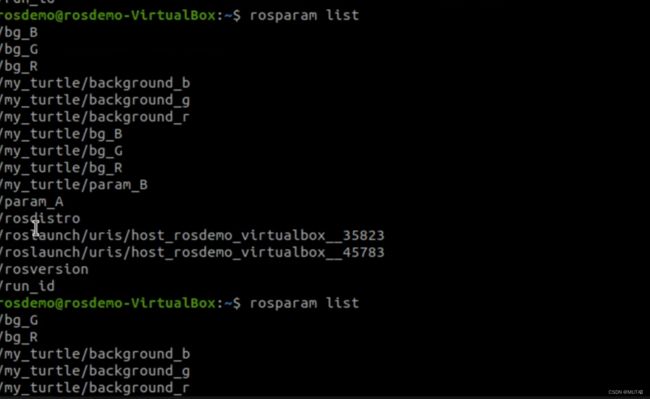
8.launch文件标签之rosparam
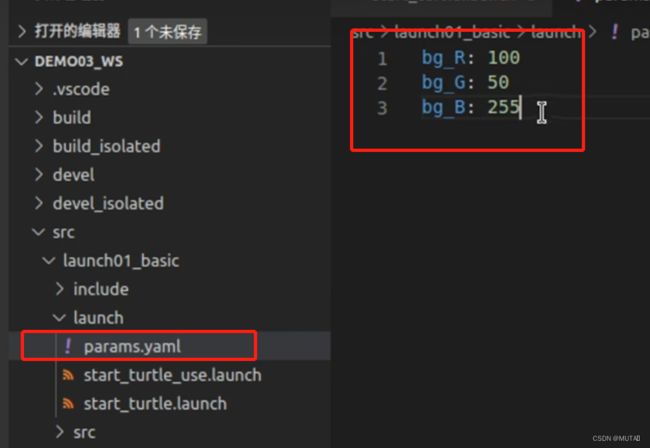
(1) 加载参数

(2)导出参数
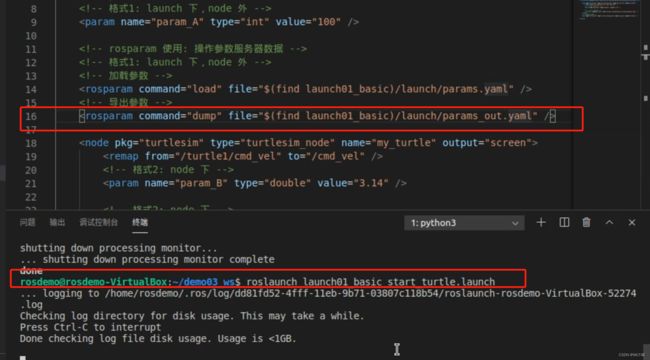
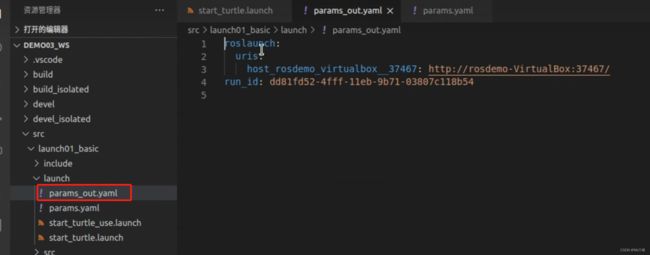
导出数据不完整,原因:rosparam会率先执行,只有当rosparam执行结束后,才会执行其他。在本案例中在node之前就已经执行了rosparam导出操作,所以导出数据不完整。
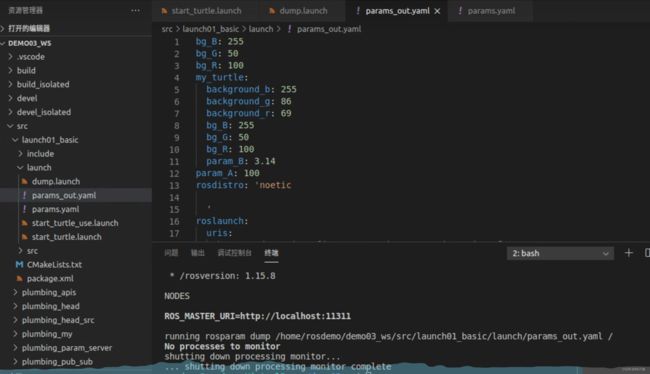
解决方法如下:
新建launch文件,将导出参数语句剪切过来。先启动start_turtle.launch再启动dump.launch文件

![]()
新开窗口

结果:
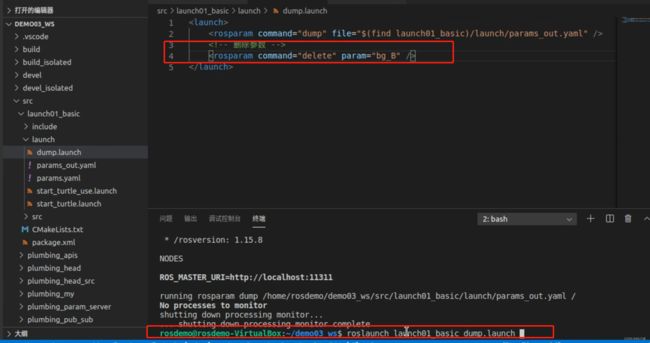
(3)删除参数
①属性
-
command="load | dump | delete" (可选,默认 load)
加载、导出或删除参数
-
file="$(find xxxxx)/xxx/yyy...."
加载或导出到的 yaml 文件
-
param="参数名称"
-
ns="命名空间" (可选)
②子级标签
- 无
9.launch文件标签之group

①属性
-
ns="名称空间" (可选)
-
clear_params="true | false" (可选)
启动前,是否删除组名称空间的所有参数(慎用....此功能危险)
②子级标签
- 除了launch 标签外的其他标签
10.launch文件标签之arg
(1)参数修改方法一
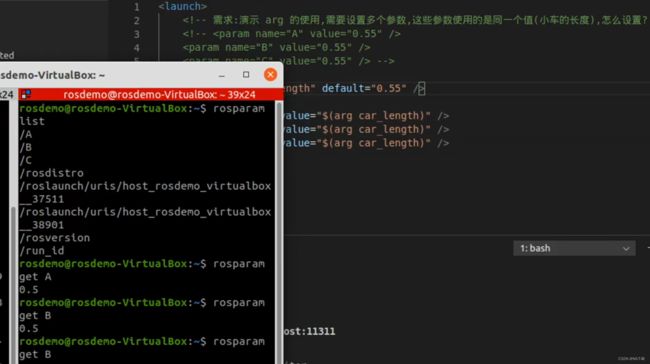
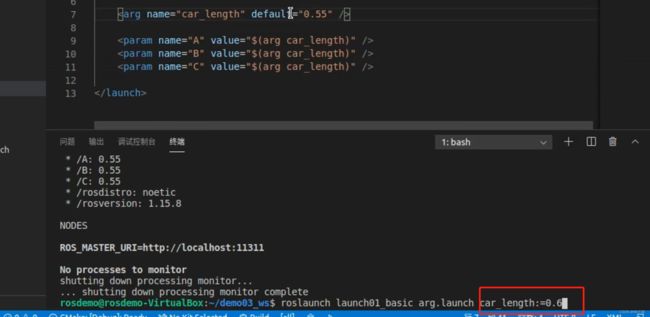
(2) 参数修改方法二
①属性
-
name="参数名称"
-
default="默认值" (可选)
-
value="数值" (可选)
不可以与 default 并存
-
doc="描述"
参数说明
②子级标签
- 无
三、ROS工作空间覆盖
1.解释
所谓工作空间覆盖,是指不同工作空间中,存在重名的功能包的情形。
ROS 开发中,会自定义工作空间且自定义工作空间可以同时存在多个,可能会出现一种情况: 虽然特定工作空间内的功能包不能重名,但是自定义工作空间的功能包与内置的功能包可以重名或者不同的自定义的工作空间中也可以出现重名的功能包,那么调用该名称功能包时,会调用哪一个呢?比如:自定义工作空间A存在功能包 turtlesim,自定义工作空间B也存在功能包 turtlesim,当然系统内置空间也存在turtlesim,如果调用turtlesim包,会调用哪个工作空间中的呢?
2.实现
3.原因
ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,该变量中按照 .bashrc 中配置设置工作空间优先级,在设置时需要遵循一定的原则:ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反--->后配置的优先级更高,如果更改自定义空间A与自定义空间B的source顺序,那么调用时,将进入工作空间A。
4.结论
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,配置在前的会优先执行。
5.隐患
存在安全隐患,比如当前工作空间B优先级更高,意味着当程序调用 turtlesim 时,不会调用工作空间A也不会调用系统内置的 turtlesim,如果工作空间A在实现时有其他功能包依赖于自身的 turtlesim,而按照ROS工作空间覆盖的涉及原则,那么实际执行时将会调用工作空间B的turtlesim,从而导致执行异常,出现安全隐患。
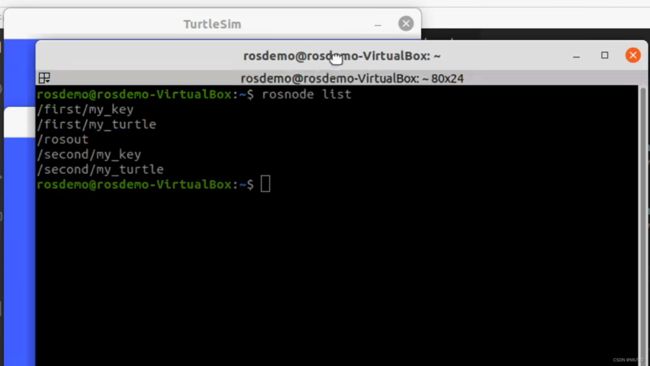
四、ROS节点名称重名
场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:
ros::init(argc,argv,"xxxx");来定义节点名称,在Python中初始化节点则通过rospy.init_node("yyyy")来定义节点名称。在ROS的网络拓扑中,是不可以出现重名的节点的,因为假设可以重名存在,那么调用时会产生混淆,这也就意味着,不可以启动重名节点或者同一个节点启动多次,的确,在ROS中如果启动重名节点的话,之前已经存在的节点会被直接关闭,但是如果有这种需求的话,怎么优化呢?
在ROS中给出的解决策略是使用命名空间或名称重映射。
命名空间就是为名称添加前缀,名称重映射是为名称起别名。这两种策略都可以解决节点重名问题,两种策略的实现途径有多种:
- rosrun 命令
- launch 文件
- 编码实现
以上三种途径都可以通过命名空间或名称重映射的方式,来避免节点重名。
1.rosrun